旋翼悬停状态桨尖涡测量方法研究
2017-09-15 09:09:41刘平安林永峰陈垚峰袁明川
实验流体力学 2017年4期
刘平安, 林永峰, 陈垚峰, 袁明川
(中国直升机设计研究所, 江西 景德镇 333000)
旋翼悬停状态桨尖涡测量方法研究
刘平安*, 林永峰, 陈垚峰, 袁明川
(中国直升机设计研究所, 江西 景德镇 333000)
为了研究旋翼桨尖涡涡核结构,采用粒子图像测速(PIV)技术对4m直径桨尖开孔旋翼在悬停状态的桨尖涡流场进行了详细测量,获得了旋翼145°方位角处桨尖涡附近流场的速度分布,以及桨尖涡的涡核半径、旋转速度和涡量分布等试验数据,并研究了PIV分析中选取不同审查窗尺寸对桨尖涡结构测量结果的影响。为了避免桨尖涡位置不稳定的影响,提出了基于桨尖涡流场速度特征的条件平均法,并与简单平均法和基于涡量峰值的条件平均法进行了对比,验证了对桨尖涡流场进行条件平均的必要性,以及所提出的条件平均法的有效性。
旋翼; 悬停; 桨尖涡; 流场; PIV
0 引 言
在直升机的飞行过程中,旋翼桨叶会脱出强烈集中的桨尖涡,桨尖涡对旋翼流场具有强烈的影响。而且这些脱出的桨尖涡与桨叶会发生相互干扰,从而在桨叶上产生出强烈的冲击气动载荷和噪声。因此开展旋翼气动特性和噪声特性的研究都离不开对桨尖涡的研究。由于旋翼桨尖涡生成和流动的复杂性,需要开展精细的桨尖涡流场测量,以获得桨尖涡的特性。
目前,作为非接触式流场测量方法,激光多普勒测速(LDV)技术和粒子图像测速(PIV)技术在流场测量领域得到了广泛应用。LDV拥有非常小探测体积,最大的优势是其具有很高的空间分辨率,使其可以准确测量桨尖涡涡核内速度梯度特别高的流场[1-2]。国外采用该方法对旋翼流场开展了大量的测量研究。
但是LDV是一种单点测量方法,测量时需要对观测区域进行扫描,测量需要大量的时间。而PIV则提供了大区域的瞬态速度场测量手段。
而且,受模型运动、自然湍流或流场的不稳定性等因素影响,旋翼的流场结构通常是随机变化的。如动态失速现象周期出现,但是每个周期的失速期都有独立的时间历程。而对于直升机旋翼尾迹,由于模型的挥舞、摆振等运动与旋转频率不完全相同,将会导致桨尖涡的位置和当地桨叶的气动特性在每转都有些许不同。而PIV提供整个区域的瞬态速度场,被认为比LDV更加适合用于测量旋翼桨尖涡流场。
随着相机分辨率的提高,PIV技术的流场测量空间分辨率也越来越高。通过对测量参数的优化,PIV流场测量的空间分辨率已经可以胜任桨尖涡结构的测量。PIV技术开始被广泛应用于旋翼流场测量[3-7]。
国外的多项先进直升机旋翼研究项目中都采用了PIV技术开展桨尖涡流场测量(如ERATO[8]项目,ATIC-1[9]和ATIC-2[10]项目以及HART II[11]项目等),用于分析旋翼流动机理以及噪声机理。
国内近年来也开展了一些采用PIV技术测量旋翼流场的研究。中国空气动力研究与发展中心的杨永东[12]、袁红刚[13-14]等开展了旋翼流场的测量,初步探索了桨尖涡的测量技术。黄水林[15]开展了纵列式双旋翼尾迹特性研究。这些研究主要测量了旋翼的尾流特征以及尾迹边界,没有对桨尖涡的结构测量开展详细研究。
本文采用PIV技术,测量了4m直径桨尖开孔旋翼145°涡龄角桨尖涡周围的流场,并研究了审查窗尺寸,以及平均方法对桨尖涡结构分析结果的影响规律。通过研究,掌握了利用PIV测量旋翼桨尖涡涡核结构的方法,获得了合理的测量结果。并得到了旋翼桨尖涡附近流场的速度分布,以及桨尖涡的涡核半径、旋转速度和涡量分布等试验数据。
1 试验设备及试验模型
1.1 实验设备
桨尖流动控制对旋翼桨尖流场的影响试验在中国直升机设计研究所悬停试验厅进行。
使用的旋翼试验台为动导数试验台,试验台包含支架系统及短舱,短舱包含动力系统、测量系统、操纵控制系统、数据采集处理系统、监视报警系统及振动监视系统等。试验现场照片如图1所示。
PIV系统包括:照明激光器、同步控制器和高速数字相机。
激光系统光源为脉冲式双Nd∶Yag激光器,脉冲能量为500mJ,脉冲宽度为6~8ns,片光的厚度小于1.5mm,相机的分辨率为2048pixel2048pixel。
粒子扩散装置采用多喷口方案,喷口间距150mm,粒子播放面积为1.5m×1.5m。当试验目的和试验状态不同时,测量区域所需粒子浓度不同。为了调节测量区域粒子浓度,需要将粒子发生器喷口布置在不同的地方。为了便于发烟位置和方向的调节,将粒子发生器放到可移动支撑台架上。
1.2 试验模型
试验模型为4m直径级别旋翼,桨毂型式为铰接式,桨叶片数2片,桨叶弦长c为148mm,桨毂半径R为300mm,旋翼实度0.094,有翼型起始位置为0.26R,桨叶负扭转为12°(从旋转中心至桨尖),桨尖形状为矩形。在桨尖布置有4根金属管,从桨尖的前缘引气,并从桨尖端面排出。4个引气孔和4个出气孔分别位于相对桨尖端面前缘点0.15c、0.30c、0.45c和0.60c处。桨叶桨尖喷气孔布置如图2所示。
2 试验方法
本次PIV试验的测量平面通过桨毂中心且垂直于桨盘平面。桨叶通过时,测量平面平行于桨叶四分之一弦线。激光器位于旋翼斜下方,向旋翼桨尖方向投射。
本次试验采用灰度互相关法获取测量区域的速度场。在不同的测量状态下,根据测量区域的流场速度调节跨帧时间间隔。粒子在2帧粒子图像间的最大相对位移小于审查窗尺寸的1/4。
试验中为了获得所需方位角,在旋翼台上安装了光电码盘,当指定桨叶旋转至90°方位角时提供一个脉冲信号,通过该脉冲信号触发PIV测试系统开展测量工作。通过控制脉冲信号与触发的时间间隔,可获得指定的测量方位角。触发延时时间t与测量方位角ψ的关系为:
式中,n为旋翼转速。
图3为使用长焦镜头获得的桨尖涡流场粒子图像,图像中桨尖涡区域粒子分布比较均匀,粒子清晰可见,可用于桨尖涡流场速度的定量测量。
3 试验结果分析处理
本次试验的目的是使用PIV技术测量桨尖涡的速度矢量场,并用于获取桨尖涡的特性,如最大旋转速度,涡核半径及涡量峰值。对图3显示的粒子图像进行互相关运算得到了桨尖涡附近的速度矢量场(旋翼转速573r/min,总距5°,拍摄方位角145°),结果如图4所示。由于此时的桨尖涡随着旋翼下洗流向下运动,并且向旋翼内侧收缩,所以经过速度叠加后,桨尖涡左上方区域的速度较高,而右下方区域速度较低。
图5给出了图4中横线处的y向速度,该横线通过桨尖涡的涡核中心,因此该曲线为桨尖涡的切向速度分布(使用桨尖速度ΩR无量纲化)。从图中可以清晰地看到1个正峰值和1个负峰值,这是桨尖涡的涡核边界,2个峰值之间距离一般被定义为桨尖涡的涡核直径。
在进一步处理PIV图像之前,先开展了PIV审查窗尺寸以及平均处理对这些涡特性数据的影响。
Fig.5 Blade tip vortex tangential velocity profile obtained from data shown in Fig.4
3.1 空间分辨率对试验结果的影响分析
为了能够精确地测量桨尖涡结构,测试设备的空间分辨率必须具备足以正确解析桨尖涡涡核区域极大的速度梯度。在速度梯度测量中衡量探针空间分辨率的参数为剪切参数α。该参数为设备空间分辨率与剪切层厚度以及速度梯度的比值。具体如下:
式中,Lm为测量设备的空间分辨率,L为剪切层厚度。
对于桨尖涡,剪切层厚度为涡核半径rc,而切向速度在涡核半径内从最大值降为零。因此,对于桨尖涡,上式可写为:
在PIV测量中,测试空间分辨率就是计算速度时所使用审查窗的尺寸。Grant[16]提出,在PIV测量中,审查窗内最大速度变化应该小于20%。因此,对于桨尖涡涡核流场,为了使用PIV有效测量出最大切向速度,须满足α<0.2。本文将使用不同的审查窗尺寸对试验获取的同一对PIV粒子图像进行分析处理,开展空间分辨率对测量结果的影响研究。
审查窗或取样窗是进行互相关运算时所取的计算区域的像素数,是最重要的PIV参数之一,相对于其它测试技术,其定义了PIV的探测体积。
为了获得旋翼桨尖涡流场结构,使用超长焦镜头结合移测架获得桨尖涡附近较小范围的视场,增大了粒子图像的空间分辨率,测量区域尺寸为182mm×182mm。
分别选取24pixel×24pixel、32pixel×32pixel、40pixel×40pixel以及48pixel×48pixel这4种审查窗尺寸对图3显示的粒子图像进行互相关运算。对应于拍摄平面,空间分辨率分别达到2.1,2.8,3.6和4.3mm。
表1给出了使用不同审查窗尺寸获得的涡核参数。通过对比可以看到,随着审查窗尺寸增大,测量获取的桨尖涡的最大旋转速度减小,涡核半径显著增大。当审查窗尺寸从24pixel×24pixel增大到48pixel×48pixel时,涡核半径增大了约18%。可见,随着审查窗尺寸增大,获得的桨尖涡流场的误差急剧增大,不再适合桨尖涡涡核结构的测量。
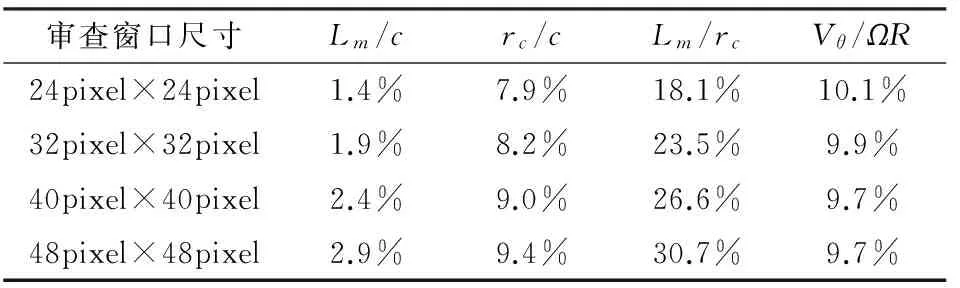
表1 不同审查窗尺寸获得的涡核参数对比Table 1 Comparison of vortex characteristics obtained with different interrogation window sizes
审查窗尺寸应该越小越好,但是它受到粒子分布、平面内粒子对丢失、平面外粒子对丢失、低的图像亮度或图像背景噪声等因素限制。大部分参数可以根据流场情况通过调整激光脉冲间隔时间、片光厚度进行优化。
但是还有2个因素仍然限制了窗口尺寸的减小。第一个是涡核内部的粒子数。事实上,悬停状态的桨尖涡具有涡核内粒子密度低的特性,这是因为桨尖涡的强烈旋转运动所产生的离心力会将粒子赶出涡核中心(图3中桨尖涡涡核处有一个黑洞就是因为粒子密度低导致的)。第二个因素是粒子在进行互相关运算的2帧图像间必须有一定量的相对运动,否则也无法测量出准确的速度矢量。
通过调整相机参数、粒子浓度、激光强度,本次试验将测量区域调整为182mm×182mm。当审查窗尺寸取24pixel×24pixel(空间分辨率2.1mm)时,PIV测量系统的剪切参数α<0.2,满足PIV测试要求。结合50%的审查窗重叠率,在桨尖涡涡核内可以获得22个有效的数据,可以比较细致地描绘出桨尖涡的涡核结构。
3.2 条件平均
试验过程中有许多不确定因素,因此,为了避免试验中出现的随机误差,对获得的试验数据必须进行平均处理。
由于旋翼系统的振动、拍照系统的振动以及桨尖涡脱离的不确定性等原因,导致了每个测量结果中桨尖涡的位置会有较大差异。如果简单地把获得的瞬态数据直接进行平均,会使得桨尖涡不同部位的速度矢量叠加到一起,破坏了桨尖涡的流场结构。本文使用2种条件平均方法处理试验数据,并与简单平均法进行对比。具体方法如下:
简单平均法:将相同状态、相同视窗下的有效瞬态处理结果相同网格点的速度矢量叠加起来,并除以图像总数。
条件平均法一:条件平均的主要目的是为了避免桨尖涡位置的不稳定性对平均结果的影响。因此,在进行平均处理前,将有效瞬态结果的坐标原点平移至涡核中心处,然后再进行平均处理。本文以涡量的峰值所处位置作为桨尖涡的涡核中心。涡量按如下公式计算:
条件平均法二:由于PIV测量结果是速度矢量场,还可以使用桨尖涡流场中速度特征来定位桨尖涡位置。本文提出,将有效瞬态结果的坐标原点平移至桨尖涡流场速度最小处,然后再进行平均处理。这样可以使各个瞬态结果中速度大小和方向相似的部分叠加到一起,尽量不破坏桨尖涡结构。
图6~8分别为使用以上3种平均法处理的桨尖涡剖面流场结果(为了便于显示,降低了速度矢量显示密度,背景为涡量云图)。对比3幅图可以看到,使用2种条件平均法处理的试验结果几乎相同,而使用简单平均法处理出的桨尖涡流场中,涡核部分的涡量明显比2种条件平均法小。
Fig.7 Velocity vector field of blade tip vortex (conditional average: method one)
Fig.8 Velocity vector field of blade tip vortex (conditional average: method two)
图9给出了通过3种平均法处理的桨尖涡涡量分布规律。可以看到,在桨尖涡中心区域,使用简单平均法获得的涡量值比条件平均法小许多,使用简单平均法获得的最大涡量比使用条件平均法二小了约44.5%。
图10给出了通过3种平均法处理的桨尖涡切向速度分布规律。
图中,2种条件平均的结果曲线几乎重叠在一起,而简单平均的曲线中,切向速度峰值明显要小许多,而且2个峰值的间距(涡核直径)也明显变大了。在涡核内,由简单平均获得的切向速度曲线的斜率、涡核内的速度梯度变小了,这就是使用简单平均法涡核内涡量会显著降低的原因。
表2给出了3种平均法得到的涡核半径以及最大切向速度。简单平均法获得的桨尖涡的涡核半径最大,约比使用条件平均法二获得的结果大38%。而其获得的切向速度峰值最小,约比使用条件平均法二获得的结果小10%。2种条件平均法获得的各项桨尖涡参数相差不多,条件平均法二结果略好一些。
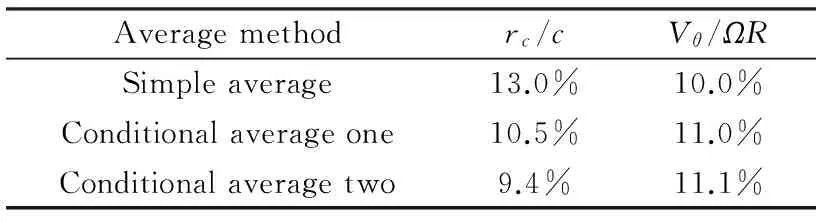
表2 不同平均方法获得的涡核参数对比Table 2 Comparison of vortex characteristics obtained with different average methods
4 结 论
通过对试验结果的分析,可以得出以下几点结论:
(1) 对于本文的试验工况,当测量区域尺寸为182mm×182mm,审查窗尺寸取24pixel×24pixel时,测量的剪切参数α<0.2,满足PIV测试的要求。结合50%的审查窗重叠率,在桨尖涡涡核内可以获得22个有效的数据,可以比较细致地描绘出桨尖涡的涡核结构。
(2) 审查窗尺寸对试验结果影响非常大,随着审查窗尺寸增大,测量获取的桨尖涡的最大旋转速度减小,涡核半径显著增大。当审查窗尺寸从24pixel×24pixel增大到48pixel×48pixel时,涡核半径增大了约18%,测量误差显著增大。
(3) 对比分析了3种平均法得到的涡核结构参数。简单平均法获得的桨尖涡的涡核半径最大,约比使用条件平均法二获得的结果大38%。而其获得的切向速度峰值最小,约比使用条件平均法二获得的结果小10%。2种条件平均法获得的各项桨尖涡参数相差不多,条件平均法二结果略好。
[1]Coyne A J, Mahendra J B, Leishman J D. Investigation into the rollup and diffusion of rotor tip vortices using laser Doppler velocimetry[C]. 53th Annual Forum of the American Helicopter Society, Viginia Beach, VA, 1997.
[2]Martin P B, Pugliese J G, Leishman J G. High resolution trailing vortex measurements in the wake of a hovering rotor[C]. 57th Annual Forum of the American Helicopter Society, Washington D C, 2001.
[3]Heineck J T, Yamauchi G K, Woodcock A J, et al. Application of three-component PIV to a hovering rotor wake[C]. 56th Annual Forum of the American Helicopter Society, Virginia Beach, VA, USA, 2000.
[4]Martin P B, Pugliese J G, Leishman J G, et al. Stereoscopic PIV measurements in the wake of a hovering rotor[C]. 56th Annual Forum of the American Helicopter Society, Virginia Beach, USA, 2000.
[5]Richard H, Raffel M. Rotor wake measurements: Full-scale and model tests[C]. 58th Annual Forum of the American Helicopter Society, Montreal, Canada, 2002.
[6]van der Wall B G, Richard H. Analysis methodology for 3C PIV data[C]. 31th European Rotorcraft Forum, Florence, Italy, 2005.
[7]Wadcock1 A J, Yamauchi G K, Solis E, et al. PIV measurements in the wake of a full-scale rotor in forward flight[C]. 29th AIAA Applied Aerodynamics Conference, Honolulu, Hawaii, 2011.
[8]Splettstoesser W R, van der Wall B G, Junker B, et al. The ERATO programme: wind tunnel results and proof of design for an aeroacoustically optimized rotor[C]. 25th European Rotorcraft Forum, Rome, Italy, 1999.
[9]Murashige A, Kobiki N, Tsuchihashi A, et al. ATIC aeroacoustic model rotor test at DNW[C]. 24th European Rotorcraft Forum, Marseilles, France, 1998.
[10]Murashige A, Kobiki N, Tsuchihashi A, et al. Second ATIC aeroacoustic model rotor testat DNW[C]. 26th European Rotorcraft Forum, The Hague, Netherlands, 2000.
[11]Burley C, Brooks T B, van der Wall B, et al. Rotor wake vortex definition-initial evaluation of 3-C PIV results of the hart-II study[C]. 26th European Rotorcraft Forum. Bristol, England, 2002.
[12]杨永东, 武杰. 悬停旋翼桨尖涡的试验研究[J]. 实验流体力学, 2008, 22(3): 36-39.
Yang Y D, Wu J. Investigation of hovering rotor tip vortex[J]. Journal of Experiments in Fluid Mechanics, 2008, 22(3): 36-39.
[13]袁红刚, 李进学, 杨永东, 等. 悬停状态下旋翼尾迹测量试验研究[J]. 空气动力学报, 2010, 28(3): 306-309.
Yuan H G, Li J X, Yang Y D, et al. Test investigation of measuring wake geometry for helicopter rotors in hover[J]. Acta Aerodynamica Sinica, 2010, 28(3): 306-309.
[14]袁红刚, 李进学, 杨永东, 等. 前飞状态下旋翼尾迹测量试验研究[J]. 实验流体力学, 2010, 24(4): 29-32.
Yuan H G, Li J X, Yang Y D, et al. Test investigation of measuring wake geometry for helicopter rotors in forward flight[J]. Journal of Experiments in Fluid Mechanics, 2010, 24(4): 29-32.
[15]黄水林, 林永峰, 黄建萍, 等. 基于PIV技术的纵列式双旋翼尾迹特性实验研究[J]. 空气动力学报, 2012, 30(3): 334-339.
Huang S L, Lin Y F, Huang J P, et al. Expermental investigation on the wake characteristics of tandem twin rotors[J]. Acta Aerodynamicsa Sinica, 2012, 30(3): 334-339.
[16]Grant I. Particle image velocimetry: a review[J]. Proceedings of the Institution of Mechanical Engineers, 1997, 211: 55-76.
(编辑:李金勇)
Blade tip vortex measurements of a hovering rotor
Liu Ping’an*, Lin Yongfeng, Chen Yaofeng, Yuan Mingchuan
(China Helicopter Research and Development Institute, Jingdezhen Jiangxi 333000, China)
In order to investigate the structure of blade tip vortices, Panicle Image Velocimetry (PIV) measurements were conducted on tip vortices trailing from the rotor with slotted blade to quantify the swirl velocity, core radius and vorticity profile at a fixed wake angle of 145 degree. The influence of the PIV image analysis parameters, e.g. sampling window size, on the vortex structure parameters has been investigated. To mitigate the effects of vortex wander, a scheme to align the velocity fields based on the locations where the velocity minimum appears prior to averaging was developed. Compared to simple average, the conditional average method obtains more accurate parameters of the vortex.
rotor;hovering;tip vortex;flow field;PIV
1672-9897(2017)04-0039-06
10.11729/syltlx20160186
2016-12-03;
2017-02-13
LiuPA,LinYF,ChenYF,etal.Bladetipvortexmeasurementsofahoveringrotor.JournalofExperimentsinFluidMechanics, 2017, 31(4): 39-44. 刘平安, 林永峰, 陈垚峰, 等. 旋翼悬停状态桨尖涡测量方法研究. 实验流体力学, 2017, 31(4): 39-44.
V211.71
A
刘平安(1985-),男,贵州施秉人,工程师。研究方向:直升机空气动力学。通信地址:天津空港经济区东三道中航直升机b座。E-mail: lpa18505097@avic.com
*通信作者 E-mail: lpa18505097@avic.com
猜你喜欢
装备环境工程(2022年9期)2022-10-13 06:49:00
数学物理学报(2021年5期)2021-11-19 07:01:38
北京航空航天大学学报(2021年9期)2021-11-02 08:24:16
大电机技术(2021年2期)2021-07-21 07:28:24
军民两用技术与产品(2021年9期)2021-03-09 05:45:28
电子制作(2019年9期)2019-05-30 09:41:48
东华大学学报(自然科学版)(2018年1期)2018-06-29 03:35:00
海洋信息技术与应用(2017年2期)2017-06-21 19:51:29
物理教师(2017年5期)2017-06-09 11:21:18
北京航空航天大学学报(2016年8期)2016-11-16 01:51:09