
一类不确定非线性系统自适应量化控制器设计
2017-09-09 16:19陈俞强
数字技术与应用 2017年7期
关键词:神经网络
陈俞强


摘要:针对带有执行器间隙的不确定非线性系统,设计出了一种自适应量化控制算法。基于著名的磁滞量化器扇形有界性质和间隙的一个逆模型,真实的控制信号成功地从耦合的动态中分离出来。所设计的控制器保证闭合系统中全部信号的有界性,及跟踪误差收敛到零附近的一个可调节的区域。仿真结果验证了该控制算法的有效性。
关键词:非线性系统;执行器间隙;自适应控制;神经网络
中图分类号:TP13 文献标识码:A 文章编号:1007-9416(2017)07-0162-04
1 引言
近年来,非线性系统的自适应控制是控制理论研究领域的热点问题,许多学者利用间隙的不确定非线性系统解决了许多控制器设计问题。目前,工业控制系统所接收到的控制信号通常由控制平台通过网络总线传送过去,复杂情况下,控制命令还可能需要利用无线频道传输。在实际环境中,网络总线和无线频道的带宽通常是有限的,因此,过去所设计的连续时间非线性控制器很可能无法通过网络总线被实时传送,这意味着当把这些连续时间控制方案应用到网络总线非线性系统时,闭环稳定性可能无法被有效地保证,即系统输出跟踪误差可能会发散或系统状态变量可能趋于无界。为了解决这个问题,提出基于量化设计的自适应控制策略。在文献[1-3],通过结合对数型量化器,K.Okano等学者提出了一种用于线性系统的自适应量化控制算法。在文献[4-6],该算法被推广至非线性系统中,且磁滞量化器替换了原来的对数型量化器以避免间隔过大的量化等级导致的控制信号震颤问题,但采用这两种自适应量化控制方案所建立的闭环系统稳定性依赖关于控制输入的一个局限条件,且该条件是否满足通常难以在控制器设计前被预先检验的,这是因为实时的控制信号是控制器被投入运行后而产生的。为了去掉这个局限条件,Zhou[7]等学者提出了一种新的Backstepping设计方案,但该方案所针对的非线性系统类型又相对局限,比如,该方案要求严格反馈非线性系统中的可参数化不确定函数仅仅存在于最后一个子系统中,而且还要求除了最后一个子系统外,其他全部子系统非线性函数和它们的偏导数都满足全局Lipschitz条件。显然,如何去除这些条件,是一个具有理论和实际双重价值的研究工作,但鉴于其难度,目前关于这方面的研究成果还相当有限。
基于以上分析,我们将研究带有执行器间隙的不确定非线性系统自适应量化控制设计。首先让控制信号通过一个磁滞型量化器,以降低其在网络总线中传输的通信率。量化器的引入使自适应控制设计变得十分困难,为了解决这个问题又不依赖于上述提及的文献中的局限条件,量化器的一种基于扇形有界性质的非线性分解方法被提出。再者,我们进一步给出了分解间隙的方法。基于这些分解,真实控制器成功地从间隙约束和量化函数中被分离出来。最后,结合鲁棒自适应技术方法,从而完成量化控制算法的设计[8-10]。
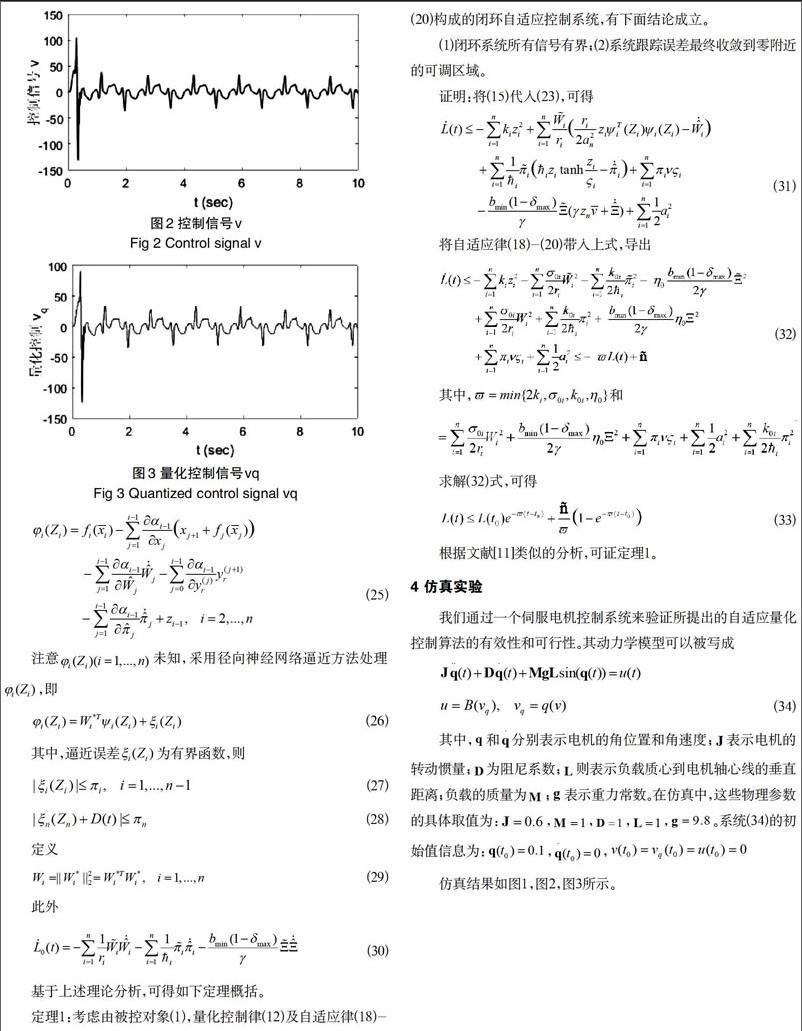
仿真结果如图1,图2,图3所示。
5 结语
针对带有执行器间隙的严格反馈非线性系统,文中提出了一种鲁棒自自适应量化控制方案。具体设计两步分解方法:首先,对间隙模型进行分解以提取出量化控制信号;然后,再接着对提取的量化函数进行分解,成功将控制信号分离了出来。接下来控制设计所面临的难度是分解后得到的控制增益是一个未知的动态函数。为了解决这个问题,我们进一步提出了魯棒自适应方法设计期望的量化控制器。通过严格的数学证明,所提出的解决方案不仅保证闭合系统全部信号的有界性,还使得输出跟踪误差收敛到零附近的一个大小可调区间。
参考文献
[1]K. Okano and H. Ishii, “Stabilization of uncertain systems with finite data rates and Markovian packet losses,” IEEE Trans. Control Netw.Syst., vol. 1, no. 4, pp. 298-307, Dec. 2014.
[2]X. Yang, C. C. Hua, J. Yang, and X. P. Guan, “New stability criteria for networked teleoperation system,” Information Sciences, vol. 233, no. 1,pp. 244–254, Jun. 2013.
[3]P. Yi and Y. G. Hong, ”Quantized subgradient algorithm and data-rate analysis for distributed optimization,” IEEE Trans. Control Netw. Syst., vol. 1, no. 4, pp. 380-392, Dec. 2014.
[4]T. P. Zhang and S. S. Ge, “Adaptive neural control of MIMO nonlinear state time-varying delay systems with unknown dead-zones and gain signs,” Automatica, vol. 43, no. 6, pp. 1021-1033, Jun. 2007.
[5]M. Chen, S. S. Ge, and V. Bernard, “Robust adaptive neural network control for a class of uncertain MIMO nonlinear systems with input nonlinearities,” IEEE Trans. Neural Netw., vol. 21, no. 5. pp. 796-812, May. 2010.endprint
[6]M. Chen, S. S. Ge, and B. B. Ren, “Adaptive tracking control of uncertain MIMO nonlinear systems with input constraints,” Automatica, vol. 47, no. 3, pp. 452-465, Mar. 2011.
[7]J. Zhou, C. Y.Wen, and G. H. Yang, “Adaptive backstepping stabilization of nonlinear uncertain systems with quantized input signal,” IEEE Trans. Autom. Control, vol. 59, no. 2, pp. 460-464, Feb. 2014.
[8]Y. J. Liu, Y. Gao, S. C. Tong and Y. M. Li, “Fuzzy approximation-based adaptive backstepping optimal control for a class of nonlinear discrete-time systems with dead-zone,”, IEEE Trans. Fuzzy Syst., DOI: 10.1109/TFUZZ.2015.2418000, 2015.
[9]C. Y. Wen and J. Zhou, “Decentralized adaptive stabilization in the presence of unknown Backlash -like hysteresis,” Automatica, vol. 43, no. 3, pp. 426-440, Mar. 2007.
[10]G. Tao and P. V. Kokotovic, “Adaptive control of systems with Backlash,” Automatica, vol. 29, no. 2, pp. 323-335, Mar. 1993.
[11]G. Lai, Z. Liu, Y. Zhang, etc, “Asymmetric actuator backlash compensation in quantized adaptive control of uncertain networked nonlinear systems,” IEEE Trans. Neural Netw., vol. 28, no. 2, pp. 294-307, Feb. 2017.endprint
猜你喜欢
现代电力(2022年2期)2022-05-23
装备制造技术(2020年11期)2021-01-26
电子制作(2019年19期)2019-11-23
电子制作(2019年12期)2019-07-16
中国生物医学工程学报(2019年5期)2019-07-16
通信电源技术(2018年3期)2018-06-26
重型机械(2016年1期)2016-03-01
大连工业大学学报(2015年4期)2015-12-11
海军航空大学学报(2015年4期)2015-02-27
电测与仪表(2014年20期)2014-04-04
