
实时图像渲染生成技术研究
2017-09-07 02:07覃海宁
数字技术与应用 2017年5期
覃海宁


摘要:本文对实时图像渲染生成技术进行了系统的探究,从实时图像渲染生成技术的图像渲染入手,介绍了实时图像渲染的原理和实现的过程,并且简述了实时图像的渲染加速和流程,在考虑到图像的失真率和远程传输的困难性,本文又对实时图像渲染生成技术做了系统的阐述以方便大家理解和改进。
关键词:实时图像的渲染;实时图像生成技术;计算机图像生成
中图分类号:TP391.9 文献标识码:A 文章编号:1007-9416(2017)05-0077-02
实时图像渲染生成技术一直是研究的热点话题,因其在现实中具有重要的应用价值。本文从实时图像渲染生成技术的图像的渲染入手,简述了实时图像的渲染加速算法和流程,通过实时图像的渲染细节层次算法和实时图像的渲染加速算法描述出整个图像的渲染技术,最后又对实时图像渲染生成技术设计做了比较系统的阐述。
1 基于图像的渲染
随着科技的发展,实时图像的渲染已经成为一个学派,实时图像的渲染手法发展成一种重要的图像处理方法。渲染最主要的数据来源就是图像。这种实时图像的渲染手法最大的优势在于所要渲染的图像像素数量与所要绘制图像的量成正比[1]。
本文使用的IBR代替物方法就是一种以实物景象图片为基础,通过对图像技术处理和视觉计算的方法,直接由繁杂的图像变为简单图像技术。也就是在经过处理后可以把拥有复杂几何属性的立体物体,换成比较简单的几何图形,这样处理过后可以大大降低图片中线条和空间属性复杂度,来达到提高图片渲染效率的效果。
在很早以前就有人提出过利用简单几何代替复杂几何作为一种加速渲染算法[2]。主要的原理就是把图像中的立体几何物体用平面布告板替换,同时用物体的实时图像,把实时图像纹理贴到布告板上。这样在计算工作量上付出是很小的,同时可以渲染和产生实时图像的替代物,这就是所为的动态生成替代物的主要算法和原理。可是,实时图像中的视点发生了改变,如果不能及时随着视点的改变而改变替代物,那么将会产生很明显的视差效果。所以急需一种有效衡量替代物的方法。如果只是改变实时图像观察角度,那么就不需要更新或者改变替代物,只需要在不停的改变视点角度的时候,根据视点变化重新生成变化后的替代物[3]。
计算中通过重新生成的替代物周围所包裹的最大和最小点来计算视点移动的最大和最小角度。这样视点移动角度的计算可以被简化,简化为更新替代物时视点移动的方向和替代物到更新后视点方向之间的角度。此外,所谓的替代物其本质上还是一种实时图像的映射方法[4-5],这样方法会占用大量的空间和运行内存,运行存储被占用会出现大量的纹理,会对渲染速度产生严重影响。随着实时图像理论的研究有人提出了一个新的理论叫做纹理拼图的理念,就是为了节约内存把多幅实时图像的纹理压缩到一张实时图像内进行拼接,这样有效地缓解了内存,提高了渲染速度和对线条的管理效率。
1.1 实时图像的渲染细节层次算法
实时图像的细节层次算法是对实时图像建立不同精度的实时图像模型,在整个过程中把不相关或者远距离的物体用低精度的实时图像模型来表示。一般实时图像模型精度的选取是根据实时图像上物体到更新后视点的距离。我们把在不同视觉和不同层次的条件下的实时图像,采取同一物体用不同精细程度的实时图像模型来表示,加快了实时图像渲染速度,实现了实时图像与视点的实时交互。目前最新处理方法是实时图像群体渲染系统结合细节层次模型与实时图像替代物渲染技术,可以实现即使图像具有大量的几何物体也可以通过实时模拟来完成的综合技术应用。
1.2 实时图像的渲染加速算法
(1)实时图像更新纹理是指应用经过移动后的替代物在布告板上的更新后的纹理。
(2)实時图像更新后替代物纹理高质量拼图大小为M×M(M为3072或5120),每一个更新后代替物对应像素空间;利用网状结晶结构把实时图像划分多个区域,每一个高像素区域对应一个更新后的替代物视点。
(3)实时图像视点空间负责管理每一个网状结晶结构,每一个晶点前段对应一块更新视点替代物的实时图像纹理。图1是替代物实时图像的渲染加速算法的总体框架流程图。其中屏幕分辨率是一个在实时图像视点表示与更新替代物表示之间切换中间值域。
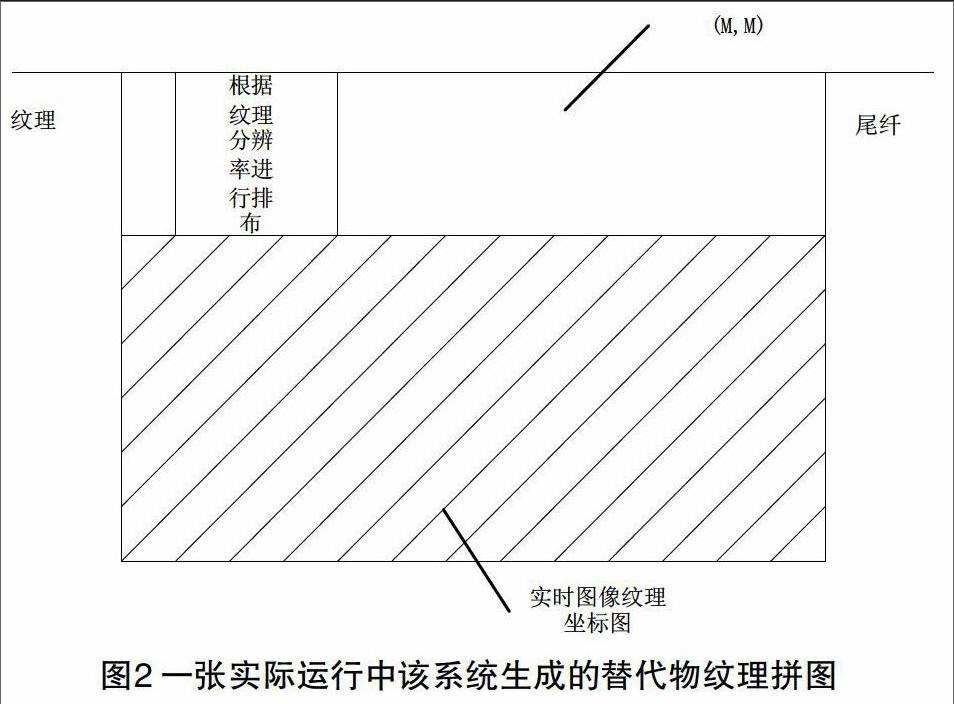
由于实时图像更新替代物需要快速长时间的置换纹理内存空间,并且把更新视角渲染进行到纹理之中,实时图像的渲染加速算法的核心就是生成视点替代物的进一步置换效果。实时图像的渲染加速算法的原理是基于纹理拼图的思想基础之上的。如图2所示,将其中一组实时图像更新的替代物纹理像素,经压缩存储在一张实时图像纹理拼图中,并把实时图像其划分为网状晶体纹理空间图像。通过视点信息动态改变,替代物在布告板纹理的实时坐标可以对实时图像中的区域进行纹理索引。这样新生成的视点纹理查询压缩存储以及实时图像替代物内存利用率速度都会有很大的提升。
2 实时图像渲染生成技术设计
实时图像渲染生成系统,要求实时图像生成置换物和视点,这就要求实时图像系统有很高的实时性。还有一方面网状驱动控制面板要放在轴台面躯体的框架上面,和地面仿真机要保持一定的有效距离,同时就会带来两个难题:一是远程数据线的输出会发生强电压干扰、传输失真、电压不稳等;另一个方面是应急驱动控制面板的实际重量,已经超过了轴台面躯体的框架所能承受的负载重量,并且驱动控制面板会有一定震动,轴台面躯体没有抗振能力。
2.1 实时图像采集设备
通过直接采集到的目标物及背景音频视频图像数据,是不能被直接实时图像系统直接识别使用的,首先需要经过实时图像采集设备进行比对分析,将其转化为网状入录图像,网状入录图像可以被图像实时生成软件识别。
2.2 实时图像生成计算机设备
在实时图像采集中,一帧实时图像生成之前,首先要把收集到的实时图像通过半实物仿真系统的实时通信网络转化为仿真信号,实时图像生成能够被计算机单元所接收的仿真信号,或者是仿真计算机传送来的置换模式的转换参数,通过实时图像生成软件系统把实时图像上目标和背景进行合成图像,并且按照失真率、几何数目和系统组件电阻阵列电压之间的关系,计算出一帧红外实时图像数据对应于系统实时电压控制数据,然后通过实时图像数据远程模拟传输系统将实时图像采集设备的数据传递给系统组件电阻阵列控制系统。还有一方面,实时图像生成计算机设备在不要求高分辨率时,还可以充当实物视频采集的设备,把实时图像生成计算机设备与图像采集单元相连,通过实时图像生成计算机设备与分析识别系统将其拍摄的几何物体及背景视频收率到影响甄别计算机中,并根据相关运算法则进行边框处理、选定模式和修改参数,用于实时图像直接驱动或者实时数据鉴别调用资源库供计算机调用。
修正运算如下:
M=(N)L;
;
进行替换k=区别表示:
;
最终可以得出关系式:;
式中,M为实时图像的像素总数;N表示实时图像的每条像素点数,L为条数;F表示实时图像水平一维点的扩散函数;b表示实时图像信号强度参数;n表示图像加性噪声;k表示图像修正参数;g表示修正图像时引用参数;kn表示k的代替参数;表示修正运算后实时图像;g1、g2分别表示一次和二次引用参数。
2.3 实时图像数据远程传输设备
实时图像数据进行远程传输设备是基于视点内存网搭建的,其主要的目的是:用于实时图像生成系统和系统组件电阻阵列控制系统之间,能够远程传输实时图像数据包或数据块。
3 结语
基于实时图像渲染生成技术发展的一个热点。本文介绍了实时图像渲染的原理和实现的过程,又对实时图像渲染生成技术做了详细的说明,实时图像渲染生成技术可以取得了比较理想的成像效果。但是也还有不少可以继续深入研究的方向等待我们去开发。
参考文献
[1]曹雪峰,万刚,李科,等.三维交互场景中基于图像的实时阴影渲染与反走样技术[J].系统仿真学报,2008(S1):4-7.
[2]邓益民,汤智谦,李红兵,等.基于LOD的大规模输电线路场景实时渲染算法优化[J].计算机与现代化,2017(1):115-118.
[3]张骈,侯进.高斯核函数快速插值的头发实时仿真与渲染[J].计算机辅助设计与图形学学报,2017(2):320-327.
[4]J.Goebel,F.Nensa,B.Bomas,H.P.Schemuth,S.Maderwald,M.Gratz,谢双双.实时SPARSE-SENSEMR心脏电影成像:图像重建优化和序列验证[J].国际医学放射学杂志,2017(1):114.
[5]徐建,刘三军,钱楷,等.利用SOPC技术改进的基于无线传感网络的药材种植系统[J].新疆大学学报:自然科学版,2017(1):84-89.endprint
