汽车牵引力控制系统(TCS)控制策略仿真
2017-09-06 08:50李春吴彤
世界家苑 2017年3期
李春 吴彤


一、牵引力控制系统应用说明
由于电动方程式赛车在起步、加速的过程中以及在湿滑路面行驶时会出现驱动轮过度滑转的现象,所以加入牵引力控制系统防止驱动轮过度滑转使赛车的加速性能得到提升。EPANDA-17赛车上装有四个轮速传感器、三轴加速度传感器、制动行程传感器、转向角度传感器、CAN通讯模块,系统可以通过传感器以及电机控制器获取所需的信号。程序首先对赛车运行状态进行检测,判断是否达到运行牵引力控制系统的条件,达到条件时,根据轮速信号计算得出滑转率,再由数字PID计算得出调整转矩值,与目标转矩比较处理后,得出最佳输出转矩,并通过CAN总线以报文的形式将转矩信号发送给电机控制器,实现牵引力控制系统对赛车的实时控制。
二、牵引力控制系统仿真
模型功能介绍
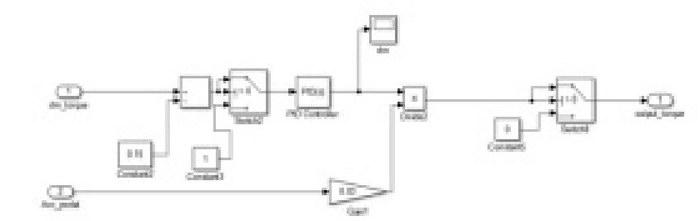
EPANDA-17赛车上使用的单电机,采用的转矩控制模式;本模型主要用于直线行驶、没有制动的情况下,结合赛车的实际情况,主要通过使用练车时传感去采集的数据,通过轮速滤波、滑转率计算、PID运算、目标转矩计算等模块,得出赛车在PID系数一定时,输出转矩与目标转矩进行比较,最终实时输出最佳的电机转矩。根据scope中目标输出转矩曲线,调整PID的系数,使得牵引力控制系统的效果更佳。
三、模型模块介绍
1.模型输入模块
本次仿真所需要的信号主要有两种输入方式。第一种:加速踏板输入信号(Acc_pedal)、四个车轮的轮速(RPM_lf,RPM_rf,RPM_lr,RPM_rr)、电机输出轴转速(RPM)、赛车加速度(ACCELx)等,信号的输入主要采用MATLAB导人练车时传感器采集的实时数据,通过数组矩阵的形式将数据输入,并且将第一行的空白数据删除。第二种:整车装备质量、传动比、车轮半径、风阻系数、目标滑转率、最大转矩、滚动阻力以及PID系数,信号通过m函数的形式运行输入到MATLAB工作区。
2、车速计算模块
通过实时输入的前轮轮速、车轮半径,通过采集程序对轮速的值进行滤波筛选,并计算得出赛车运行各个时刻的车速。
3、驱动轮轮速计算模块
通过实时输入的后轮轮速、车轮半径、电机输出轴转速,通过采集程序对轮速的值进行滤波筛选,并计算得出赛车运行各个时刻的驱动速度。
4、滑转率计算
通过采集的前后轮速,由滑转率计算公式计算得出当前赛车的滑转率。
5、输出转矩模块
通过前面计算得出的车速、驱动轮速度、滑转率,与目标滑转率进行比较,使用PID模块,结合输入的加速踏板信号,计算得出输出转矩。
2.目标转矩计算模块
通过前面输入的加速度信号、输入的滚动阻力、以及计算得出的车速信号、传动比、车轮半径等信息,通过MATLAB function模塊计算得出赛车需要的转矩大小。仿真结果
(作者单位:四川省成都市西华大学西华学院)
猜你喜欢
科技创新与应用(2020年15期)2020-05-21
红领巾·探索(2020年2期)2020-05-19
电脑报(2019年10期)2019-09-10
电机与控制学报(2018年9期)2018-05-14
科技创新与应用(2017年26期)2017-09-12
科技创新与应用(2017年1期)2017-05-11
中学生数理化·高一版(2016年4期)2016-11-19
科技与创新(2016年6期)2016-04-21
航空模型(2016年1期)2016-03-01
股市动态分析(2015年24期)2015-09-10