
基于红外传感器的数控电动阀
2017-09-03 10:13:56李自臣
电子设计工程 2017年15期
李自臣,陈 梅
(乌鲁木齐职业大学 信息工程学院,新疆 乌鲁木齐830002)
基于红外传感器的数控电动阀
李自臣,陈 梅
(乌鲁木齐职业大学 信息工程学院,新疆 乌鲁木齐830002)
以"0、1"组合的数字信号作为数控电动阀的执行信号,以红外传感器、球阀、7字形电机、电机驱动电路为硬件核心,完成了数控电动阀门的位置检测、阀门电机驱动与信号传输电路等电路设计。采用红外传感器反馈阀门开合状态的控制方式,对球阀开度进行控制,进而对管道内的流动液体实现一定范围内的流速与流量控制,经试验测定表明此电动阀门装置集成度高、控制灵活、结构简单,可操控性强,适合工农业和科研实验室的流速与流量控制使用。
球阀流速控制;流量控制;红外传感器;电机;反馈控制
在工农业生产、科学研究及科学实验中,时常需要考虑流量计量和流速控制问题[1]。 目前用于管道中流量和流速控制的阀门主要以机械阀门和电磁阀门为主,这类计量仪器仪表已经成为许多过程控制和检测仪器仪表中的重要组成部分[2]。在选购流量仪表时需要考虑准确度、抗干扰能力、集成度、接口及使用方便程度等因素,而国内数控电动阀门技术与国外相比有较大差距,国内数控电动阀主要存在结构不合理,控制精度低,安全性能差等不足之处。随着电子技术和控制技术的发展,国内厂家对数控电动阀门进行研究,各项指标和性能在逐步提高,但成本也随之增加,产品价格比较昂贵[3]。文中描述了一种基于反馈控制的数控电动阀门的设计过程。
1 数控阀门整体结构及实施原理
本装置主要硬件包括7字型电机、球阀、电机与球阀连接支架、阀门驱动电路、扇形金属片和红外传感器(U型光电开关)等组成。其中电机转轴与球阀转轴连为一体,并在电机转轴末端固定有扇形金属片,金属片扇面角度与球阀阀体角度存在一定关系(无论电机带动球阀正转或反转,当球阀开通或闭合的时候金属片保证刚好使得红外传感器信号发生改变),并与球阀处于同一个中心,具体连接如图1所示。
从图1和图2可知,7字型电机1与阀门驱动电路板2上的电机驱动接口15电联接,U型光电开关8与阀门驱动电路板2上的红外线反馈信号端口6电联接,阀门驱动电路板2上的数字信号控制1端口4及数字信号控制2端口5与外部控制电路电联接,阀门驱动电路板2上的12V电源接口与外部电源连接,为7字型电机1提供工作电源,阀门驱动电路板2上的5V电源接口7与外部电源连接,为阀门驱动电路板2提供工作电源;扇形阻挡片10的圆心固定设于7字型电机转轴14轴心,扇形阻挡片10与U型光电开关8之间的相对位置关系为:当球阀12刚刚开启或完全闭合时,扇形阻挡片10刚好旋转至U型光电开关8的接收端,对U型光电开关8形成信号阻断;阀门驱动电路板2、U型光电开关8、扇形阻挡片10均置于所述7字型电机1的基座上。
此装置的基本工作原理是通过红外传感器反馈阀门的开、闭信号,并通过外部控制电路与阀门驱动电路来实现球阀的开度调节。
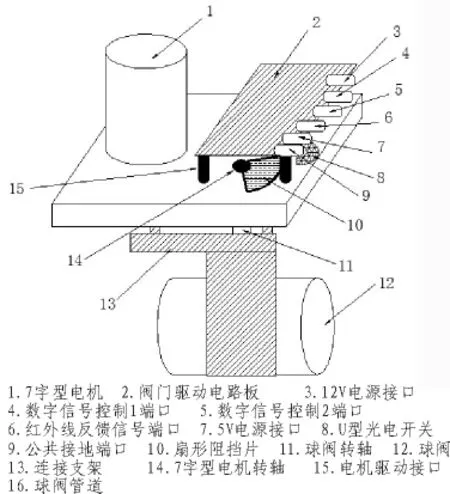
图1 数控电动阀门示意图
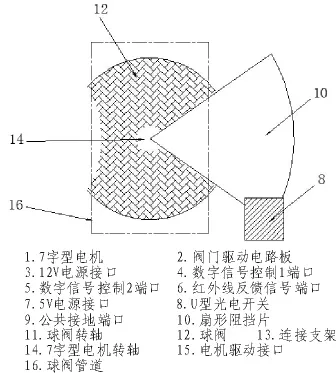
图2 扇形金属片与球阀转轴及红外传感器安装纵面示意图
2 主要硬件
2.1 7字型电机
7字型电机属于直流减速电机的一种,因电机结构简单,易启动,易维护,寿命长,低能耗,高转速,高扭矩等优点,被众多工程设计者亲眸[4]。该类产品已广泛应用于监控系统、遥控窗帘、自动执行机构、泵驱动,烤炉,舞台灯光,电动阀门等多个应用场景[5]。
2.2 球 阀
阀门是管路流体输送系统中主要的控制部件,常用于调节介质流动方向和通路断面,具有导流、节流、分流、溢流卸压、截止或止回等功能[6]。用于流体控制的阀门,其品种和规格繁多,可用于控制水、蒸汽、油品、熔融液体、泥浆、各种腐蚀性介质、液态金属和放射性流体等各种类型流体地流动。阀门的工作压力可以从0.001 3MPa到1 000MPa的超高压,工作温度可以c-270℃的超低温到1 430℃的高温[7]。
球阀是众多阀门品种中最常用的阀门之一。因其具有流体阻力小、结构简单、体积小、重量轻、紧密可靠、维修方便、适用范围广等特点,被广泛的应用于石油炼制、长输管线、化工、造纸、制药、水利、电力、市政、钢铁等行业[8]。本应用中通过电动方式控制球阀,阀门在传感信号的作用下,通过驱动机构使启闭件作回转运动,进而改变其流道面积的大小以实现其控制功能。
2.3 U型光电开关
U型光电开关是对射式光电开关的一种即槽型光电开关,此类开关由红外线发射管和红外线接收管组合而成,是一款红外线感应光电产品[9]。U型光电开关中槽的宽度决定了感应接收信号的强弱与接收信号的距离,它以光为媒体,由发光体与受光体间的红外光进行接收与转换,检测物体的位置。U型光电开关灵敏度高,高分辨率,抗干扰能力强,可直接与逻辑电路和光电耦器连接,比较安全可靠,适合检测高速变化,可以调节灵敏度[10]。U型光电开关在电子设备上应用非常广泛[11]。
3 阀门电机驱动电路设计
如图3所示,阀门电机驱动电路原理为:当数字信号控制1通过图的端口4和数字信号控制2通过图1的端口5接收到“01”信号时,图1中电机驱动接口15会产生促使7字型电机1向某一个方向旋转的电压,如顺时针方向;当数字信号控制1端口4和数字信号控制2端口5接收到“10”信号时,电机驱动接口15会产生促使7字型电机1向相反方向旋转的电压,如逆时针方向;7字型电机1的具体旋转方向根据实际连接情况而定。图1中U型光电开关8在扇形阻挡片10没有遮挡光信号的情况下,传递的反馈信号是“1”;当扇形阻挡片遮挡光信号后,传递的反馈信号是“0”。由此阀门的控制系统通过检测传递的反馈信号来判断阀门的开合状态,通过检测控制信号的执行时间判断阀门的开度。
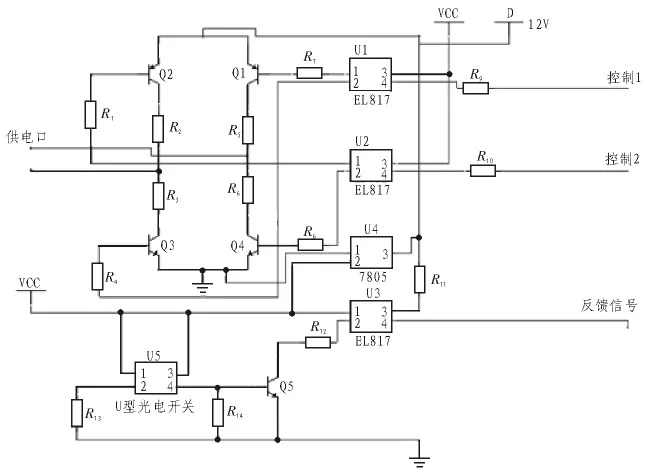
图3 控制驱动电路图
4 系统测试
测试系统以水为测试对象,因4分管道最常见,故选用4分球阀。同时为实时检测通过调节阀门开度进而调节流速与流量,选择4分口的水涡轮传感器。流量范围:流量1-30L/分,最小启动流量1.25L/min,工作电压范围:DC3V-18V,额定电压:5V[12]。7字形电机工作电压:12~24V,DC:12V空载 47转/分钟,额定扭矩(kgf.cm):6.5,最大扭矩(kgf.cm):12,驱动电路中提供12V直流电压[13]。测试系统以AT89S52单片机为下位机控制中心的,承担采样计算、显示控制和流量控制等过程,上位PC机通过RS485通讯电路与下位机通信,获取控制状态。本系统采用C语言进行开发。

图4 数控阀门对管道流体的控制测试
系统运行原理:系统启动后,初始化过程由单片机控制电路通过图1的U型光电开关8传递给红外线反馈信号端口6的反馈信号确定球阀12处于开启(“1”表示开启)还是关闭(“0”表示关闭)状态,进一步确定向图1的数字信号控制1端口4和数字信号控制2端口5输入代表7字型电机1旋转方向的数字信号,将阀门调整到即将打开的临界状态。正常工作模式中,经LCD1602显示器提示用户键盘输入希望达到的瞬时流量范围量值,按键确认后,系统分析计算出打开阀门的顺时针旋转数字信号“01”的执行时间,输送给电机驱动电路,驱动电路驱动7字形电机旋转进而确定阀门的开度。随后,单片机在中断子程序中以中断方式采集涡轮传感器经放大送来的脉冲信号。此时,单片机中定时器计时也同时进行着(系统中晶振为11.0592MHZ)瞬时流量统计,依据采集的瞬时流量适度调整阀门顺时针或者逆时针旋转时间,快速将瞬时流量调整在一定范围内。当系统通过键盘或者pc端接收到停止工作指令后,关闭阀门,等待新一轮的控制。在这个过程中系统可以通过RS485串口响应来自PC端的获取流量数据的请求。
正常工作模式中,通过单片机控制电路输入“01”信号,7字型电机1顺时针旋转,红外线反馈信号由“0”变换成“1”时,说明球阀12开始逐渐打开;若红外线反馈信号由“1”变换成“0”时,说明球阀12完全关闭;根据7字型电机1的旋转时间,当球阀12旋转至所需开度时,通过单片机控制电路输入“00”信号即可使球阀12停止旋转。当球阀12开度过大时,通过单片机控制电路输入“10”信号,7字型电机1逆时针旋转,以调整球阀12开度。当球阀12需要关闭时,继续通过单片机控制电路输入“10”信号,直至红外线反馈信号由“1”变换成“0”时再通过控制电路输入“00”信号,球阀12处于关闭状态。使用过程中,只需通过单片机控制电路做好数字信号控制1端口4、数字信号控制2端口5和红外线反馈信号端口6的组合使用,便能灵活控制球阀12的开关和开度。实际测试结果(以民用自来水为例)如表5所示。

表5 实验测试数据
经过多次测量,统计出的表5范围值。分析表中测试数据可知,此装置可以根据实际需要快速调节阀门的开度,通过开度大小的变化,进一步调整管道流体的瞬时流量。后期可以尝试对瞬时流量的精确控制,比如采用增量式PID控制算法。
5 注意事项
以单片机、7字形电机、涡轮流量传感器和数控阀门为组件的控制系统软件和硬件设计时需要注意以下几点:
1)整个测试装置安装时,如果涡轮流量计安装在阀门出水口后端测试数据波动较大,最好安装在数控阀门进水口端,保证测量的准确性。
2)如果希望提高整个控制装置的阀门调节响应时间,可以通过提高电机的转速,如果尝试将此装置用于大型管道,需要考虑电机转动阀门的扭力大小比例。
3)在将电机转轴与阀门转轴进行连接时,需要注意两个轴心的对接,如果两个轴的轴心不在一条线上,电机转动调节阀门开度时易引起两轴振动,不能保证装置的结构稳定性。
6 结束语
数控电动阀门以7字形电机、红外传感器、电机驱动电路、球阀为主要装置,通过单片机等外部控制电路发布“0、1”组合的数字信号及控制信号持续时间实现对阀门开度的控制,通过红外传感器反馈阀门的开合状态,进一步达到对流量和流速的监测。测试系统中采用C语言进行开发,用RS485串口连接PC机,适合工业控制和科研实验中对仪表的二次开发使用[14]。如果在控制系统的中加入增量式PID等控制算法,可以为流速控制提供较好的软硬件环境[15]。另外,此装置可以依据使用环境的要求不同采用不同的电机和不同尺寸的球阀,驱动电路电压也可根据电机动力需求不同进行调配。此装置设计简单、性价比较高,具有较好的实用价值。
[1]艾昌文,曹良坤.电动阀门高灵敏度控制技术研究及其应用[J].自动化仪表, 2014(11):76-79.
[2]王亚利.电动阀门的智能化及其发展现状[J].科技创新与应用, 2014(8):51-53.
[3]沈裕彬,蒋开伟,潘晓跃.基于单片机的水流量控制装置设计[J],电子世界,2013(17):56-58.
[4]张具琴,胡振,王海洋.基于AT89S52的手势可控LED滚动显示屏设计[J],电子设计工程,2015(8):43-46.
[5]刘帅,祖静,张红艳.基于单片机的步进电机控制系统设计[J],电子设计工程,2010(7):65-67.
[6]高院生.智能阀门定位器的研究与设计 [J].河南科技, 2013(11):172-174.
[7]储昭碧,林显,郭琳琳,等.基于直接转矩控制的电动阀门定位器设计[J].仪表技术与传感器,2013(3):41-44.
[8]牛峰,李奎,王尧.基于占空比调制的永磁同步电机直接转矩控制[J],电子技术学报,2014(11):66-69.
[9]王海霞,颜桂定,李宝辉,等.直线电机运动控制系统的软件设计与实现 [J].电子测量与仪器学报,2013(3):55-57.
[10]王沁,徐科军,姜鹏,等.具有反向PWM的阀门定位器控制方法及实现[J].仪器仪表学报,2011(9):67-70.
[11]张伟福,叶勇,王冬林,等.管线球阀产品及监造质量控制概述[J].设备管理与维修,2016(4):70-73.
[12]胡国良,廖明科.混合流动式磁流变阀的结构设计及性能分析[J].机床与液压,2016(7):54-56.
[13]沈裕彬,蒋开伟,潘晓跃.基于单片机的水流量控制装置设计[J],电子世界,2013(17):56-58.
[14]胡冠山,肖海荣.基于μCLinux的嵌入式智能节点的设计与实现[J].传感器世界,2016(3):40-42.
[15]张娟,李炳旗,李仲秋.智能阀门定位器在己内酰胺装置中的应用[J].兰州石化职业技术学院学报,2013(2):105-107.
Based on infrared sensors NC electric valve
LI Zi-chen,CHEN Mei
(Information and Technology College of Urumqi Vocational University,Urumqi 830002,China)
Digital signal"0、1"as a combination of numerical performing signal electric valve, infrared sensors, ball-shaped motor 7, the motor drive circuit as the hardware core, the position detection is completed NC electric valve,and the valve motor drive transmission signal circuit design circuit.Infrared sensor feedback valve open and close state control of the valve opening is controlled,and then the flow of fluid within the pipe to achieve a flow rate and flow control within a certain range,the test indicates that the measured electric valve device is highly integrated, flexible control simple structure,maneuverability, suitable for industry, agriculture and research laboratories velocity and flow control use.
ball valve; velocity control; flow control; infrared sensor; motors; feedback control
TN99
:A
:1674-6236(2017)15-0166-04
2016-07-05稿件编号:201607027
李自臣(1979—),男,重庆人,硕士,高级工程师。研究方向:计算机技术。
猜你喜欢
商品与质量(2020年33期)2020-11-07 02:19:42
电子技术与软件工程(2020年23期)2020-03-15 02:44:30
现代商贸工业(2018年31期)2018-12-08 11:17:54
电子测试(2018年13期)2018-09-26 03:29:32
电子制作(2018年16期)2018-09-26 03:27:16
吉林大学学报(理学版)(2018年2期)2018-03-27 08:02:52
山西建筑(2018年22期)2018-03-22 23:36:27
电子测试(2017年11期)2017-12-15 08:56:50
设备管理与维修(2016年6期)2016-03-16 02:21:53
国防制造技术(2016年2期)2016-03-12 17:34:26
