对非线性摩擦系统前馈控制的教学探讨
2017-08-30 12:51黄常练
广东教育·职教版 2017年8期
黄常练
笔者在机电教学部教学过程中,对非线性摩擦系统的前馈控制进行了深入思考,借鉴几本经典教材及机械学科组的教学经验,从而举出了本文中的例子,意图在于理论联系实际,让学生能主动利用所学知识来思考如何分析解决动力学系统建模中的问题。
一、系统建模
我们以一个例子说明使用前馈补偿来解决因反馈控制器引发的时间滞延和灵活性等问题的可能性,同时可以知道,前馈控制的另一个很好的应用是补偿非线性摩擦。
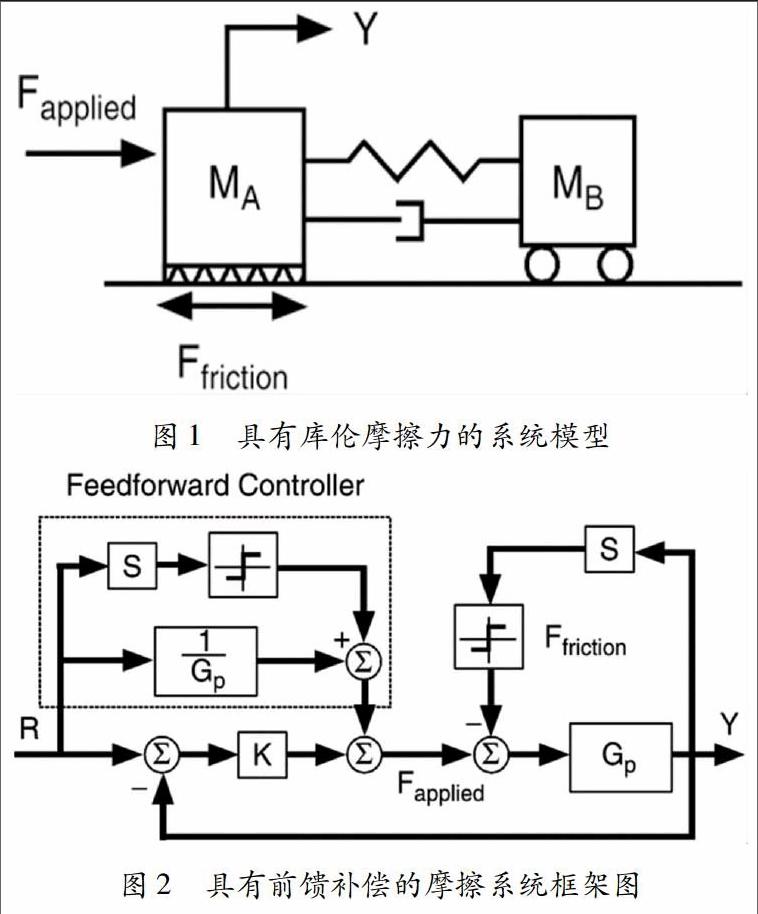
考虑如图1中所示的动力系统,一个外加作用力Fapplied移动一个具有库伦摩擦力Ffriction的块状物体MA,而与块状物体MA并联的是一个柔性附件MB系统,可以看作是质量-弹簧-阻尼器系统。
我们将考虑一个理想的摩擦动力学模型,那么可以知道,前馈补偿器是可以用来改进轨迹跟踪的,就上面图1的系统模型,可以得到一个控制系统的框架图,如图2所示,可以看到前馈补偿器包含了被控对象的逆动态。
二、无前馈补偿时的控制系统分析
首先,分析在没有前馈补偿时控制系统的表现,为了分析我们先建立一个基准系统,设置MA为1,MB为0.5,弹簧常量为15,阻尼系数为0.3,摩擦系数为0.3。
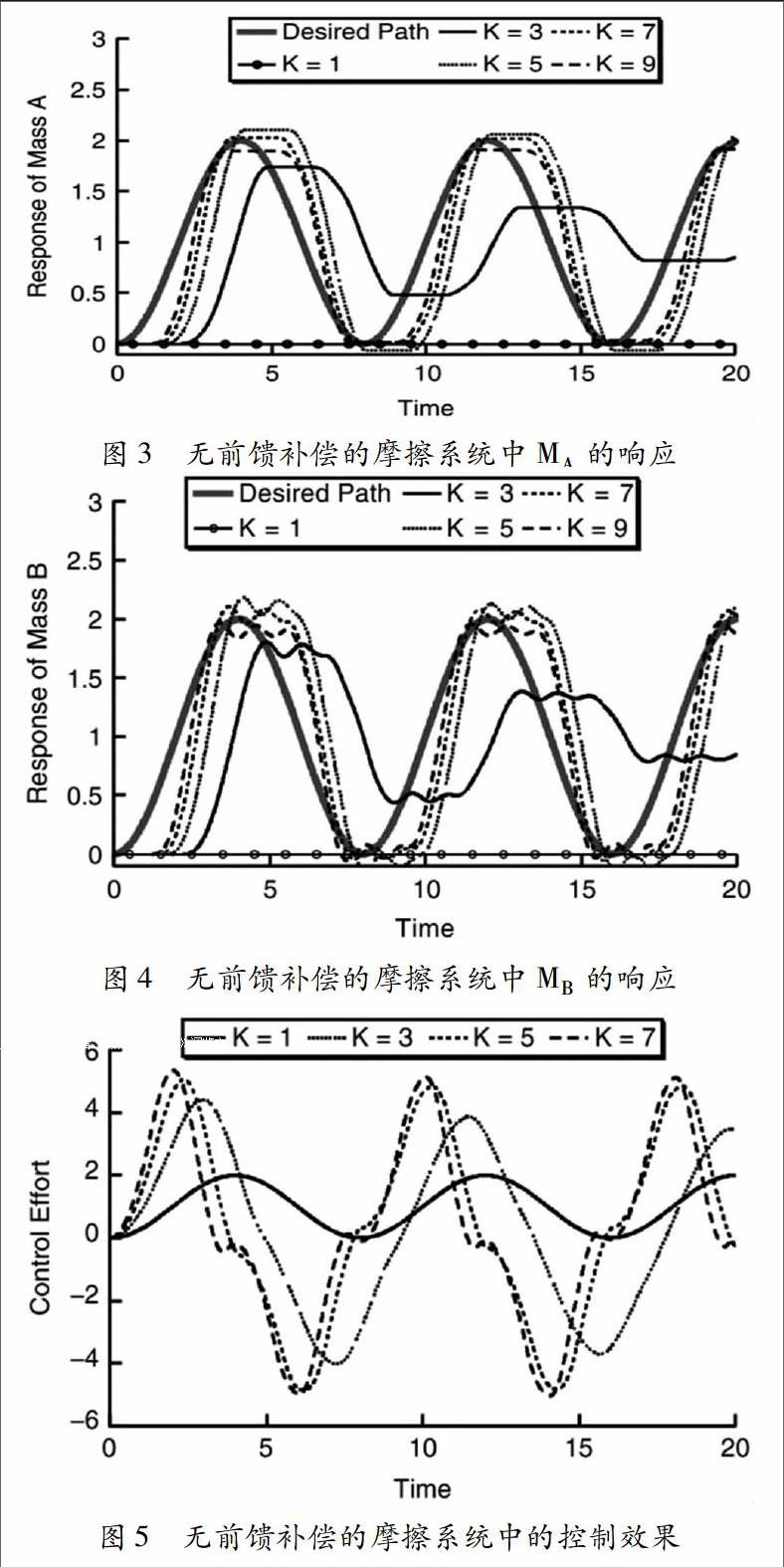
图3描述了在不同的反馈控制增益时MA的响应,数据曲线可由式(1)得出。
当增益为1时,控制效果太弱抵消不了摩擦力,所以系统并不会移动。当增大增益时可以打破系统的静止状态,但是图3显示,轨迹跟踪还是非常弱。
图4描述了在同样范围的反馈增益下MB的响应,这部分系统的响应加入了柔性动力学系统,相应的控制效果如图5所示。
三、引入前馈补偿时的控制系统分析
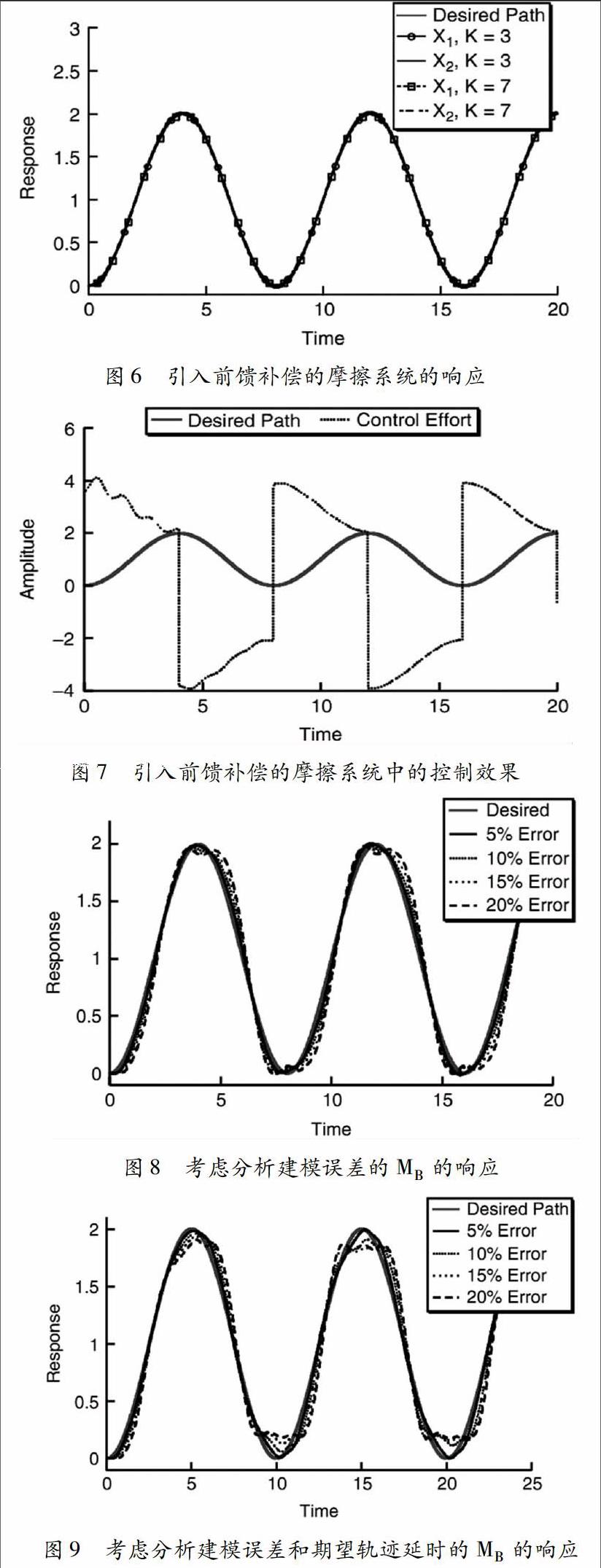
当引入前馈补偿时,MA与MB的响应曲线改进了很多,如图6所示,而控制效果也将变得如图7所示。
控制效果曲线表现出不连续的突变,并不能完全模拟真实的制动器,所以通过仿真得到的轨迹跟踪也表现得并不完美。
图8描述了当考虑到分析建模的误差时轨迹跟踪的曲线。引入的前馈控制不单依靠于系统建模,而且还依靠于期望的轨迹。同样,图9描述了在考虑相同的分析建模误差時导致的期望轨迹严重延时,从图8中的8秒变为图9中的10秒。
四、总结
在非线性摩擦系统的前馈控制的教学过程中,笔者发现学生仅仅依据课本内容及参考资料,并不能很好地理解如何把原理公式应用在建模分析中。笔者根据学生的实际情况,对非线性摩擦系统的前馈控制课程内容进行了适当的归纳与引导,然后在课堂中进行讲授,发现学生都能很好地理解,并可以根据讲解思路,举一反三思考如何分析其他非线性摩擦系统的控制过程,起到了很好的“授人以渔”的作用。
责任编辑 陈春阳
猜你喜欢
福建中学数学(2021年1期)2021-02-28
电子产品世界(2021年8期)2021-01-16
小资CHIC!ELEGANCE(2021年44期)2021-01-11
布达拉(2018年5期)2018-05-14
作文周刊·小学二年级版(2018年9期)2018-04-18
西江文艺(2017年15期)2017-09-10
成长·读写月刊(2017年8期)2017-08-12
新高考·高一物理(2016年10期)2017-07-07
课堂内外(小学版)(2017年3期)2017-04-15
中学科技(2015年10期)2016-01-06