一种变频冰箱压缩机在重载时的启动方法
2017-08-30 00:17:22四川长虹电器股份有限公司王声纲
电子世界 2017年15期
四川长虹电器股份有限公司 王声纲
一种变频冰箱压缩机在重载时的启动方法
四川长虹电器股份有限公司 王声纲
本文提供一种永磁同步电机重载启动的方法,可以很好的解决冰箱压缩机在重载下的启动问题。该方法在传统永磁同步电机的启动基础上,采用在速度开环的基础上,电流直接控制电机运行,使得电机安全度过重载阶段,而后再使得速度环闭环,达到稳定运行的目的。即使在重载的情况下,也能完成压缩机的启动。
永磁同步压缩机;重载启动;电流控制
1 引言
现阶段变频冰箱的压机采用的电机一般是永磁同步电机。从驱动方式看,采用永磁同步电机的变频压缩机可用方波驱动或者正弦波驱动。但是,正弦波驱动的冰箱压缩机的噪声和振动小,效率更高,更加具有竞争力。
本文在直流变频冰箱压缩机模型的基础上,通过对传统的三段式启动方法的改进,在切换后直接用电流方式控制压缩机,使得压缩机渡过负载最大的时候,再使得速度环闭环,从而使压缩机平稳运行。
2 永磁同步电机的模型及其控制原理
2.1 电机模型
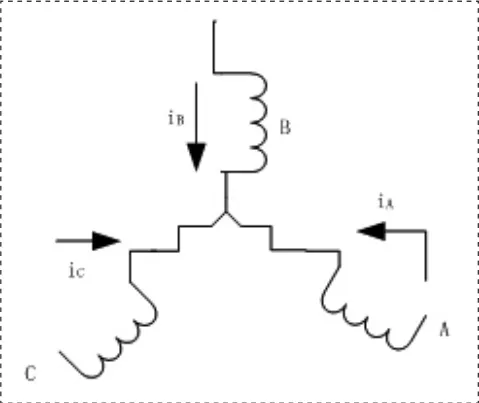
图1 电机定子三相电流
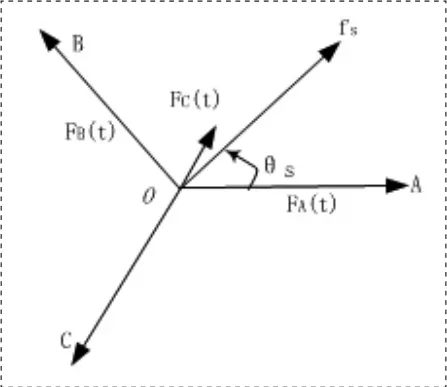
图2 电机定子三相电流产生的磁动势

图3 永磁同步电机模型
由图1可知三相绕组轴线ABC构成的空间三相轴系;图2为三相绕组基波合成磁动势;图3为永磁同步电机模型。定子三相绕组通正向电流iA、iB、iC。则相应的三相磁动势为:

式中,Pn为极对数;Ns为绕组匝数;kws为绕组因数。当相电流的瞬时值为正值时,磁动势矢量方向和该相绕组轴线一致,反之则相反。
则合成磁动势为:

式中,Fs为 fs的幅值。
考虑到功率不变的约束,确定单轴线圈有效匝数为每相绕组的有效匝数的倍。则由(2-2)得到:

对于图3,永磁同步电机的模型而言。则定子电压矢量方程为:

式中,φf为励磁空间矢量,是永磁体转子产生的,即KE。
根据上式,及其双轴理论。把ABC坐标系下的永磁同步电机模型改变成dq轴下的表现形式,如下:

2.2 控制原理
在变频冰箱的控制中,压缩机根据温度传感器信号,通过相关规则,转化为相应的压缩机的转速调节信号,使得压缩机在不同工况下运行。
由压缩机数学模型可知,永磁同步电机本身具有非线性和强耦合性,常规的控制很难满足其控制需求。在长期的研究中,一般采用矢量控制和无位置传感器控制来实现其控制。
控制系统原理图如图四。该图由电流环和速度环组成双闭环控制系统。其控制原理为:当给定的速度命令不为零时,检测定子相电流,然后对电流进行Clarke变化和Park变换,得到两相旋转坐标的电流和相关电压,根据检测速度的相关算法得到电机的实际转速;实际转速和命令转速之差,经过PI调节(此链控制器)得到电流的命令值,通过最大力矩电流比控制,再与实际的电流命令值做比较,通过PID调节,得到调节后的旋转坐标下的电压,在经过Park变化和角度,应用SVPWM计算,得到相关的三相电压,最终通过三相逆变器(3 phase inverter),驱动压缩机(PMSM Motor)工作,实现电机无传感器矢量控制。

图4 压缩机无传感器矢量控制框图
3 电流控制方式下的电机启动
由上述可知压缩机一般的控制方式。但在启动压缩机的时候,需要特殊的步骤,才能启动,而后才能使压缩机平稳运行。
一般的压缩机启动步骤分为转子位置的确定、异步拖动和从开环状态切换到闭环稳定运行三部分:
3.1 转子位置的确定
无传感器技术无法在压缩机静止的时候从电气参数中得到转子的位置。故对于转子位置的获取,现阶段的一般做法是用高频信号注入或者磁场定向。高频注入法只能应用于凸极电机,故一般采用磁场定向。具体方法是,通过坐标变化,使得iq等于0,id线性增加到固定值。使得转子的磁极固定在U相上。
3.2 异步拖动阶段
在转子位置确定的基础上,通过一定的速率增加转子的转速,使得转速达到规定的转速,才能通过无位置传感器算法计算得到转子的位置。在拖动阶段,保持id和iq的值不变,根据转速指令使得压缩机的转速达到设定值。此阶段速度是开环的。
3.3 从开环状态切换到闭环状态
当压缩机达到开环规定转速后,此时可以通过无位置传感器估算转子的位置,使得id的电流按照正弦的方式逐渐变为0,iq的值按照正弦的方式增加到指定电流值。该过程的时间一般很短。在变换完成后,使得速度闭环,转子的实际转速通过无位置传感器估算,跟踪速度的命令值。最终达到稳定运行的目的。改启动过程和相关的控制参数有关。控制参数根据经验,选取合适的值,使得压缩机在启动的过程中,平稳快速。
该方法在压缩机的负载不重的情况下,能够启动成功。但是负载如果加重,会导致压缩机启动失败。为了解决这个问题。下面提出电流控制的方法启动压缩机。
3.4 用电流控制的方法启动电机
在异步拖动结束后,直轴电流id通过正弦波的方式减小到0,交轴电流iq通过正弦波的方式增加到指定值。过渡阶段结束,进入无位置传感器速度闭环控制状态。速度环继续开环。
在进入无位置传感器速度闭环控制状态的初始时间内,速度相关的故障(失步)暂不报,给定电流,其中,为上一周期给定的q轴电流为当前周期给定的q轴电流iq,ε为增加量,按照的方式非线性增加(这样能够避免重负载导致启动失败);的初值为0,不大于设定值Iqmax。当该时间结束后,再按照速度环给定的运行。相关的所有保护程序正常运行。
在进入无位置传感器速度闭环控制状态的时刻,速度的命令值f = 0,后续根据,其中为增加量,可根据具体情况调整;f 的最大值为设定的 fhmax。当T4结束后,电机根据整体的控制策略改变速度。相关的所有保护程序正常运行。
4 实验结果及分析
根据上述描述的方法,在匹配的硬件和想软件修改的基础上,采用工质为R290的新型制冷剂作为冰箱的制冷剂,在吸排气为2Mpa压差的基础上,进行相关的实验。相关的启动波形如下:

图5 仿真工具观测的相关波形

图6 测试压缩机的相电流波形
5 结论
本文提出的通过直接电流控制方法使得压缩机在闭环的初期阶段,通过负载重的阶段,达到压缩机顺利启动,稳定运行的目的。该方法在永磁同步电机模型的基础上,通过对传统电机启动的分析,给出了用电流控制的启动方法,并详细说明了该方法的具体操作步骤。通过具体实验验证,该方法能够使压缩机在重负载的情况下,顺利启动压缩机,实现稳定运行的目的。
[1]王成元等.电机现代控制技术[M].机械工业出版社,2007.
[2]杨百昌等.变频压缩机启动问题分析与研究[J].电器,2013.
[3]林东轩.直流无刷电机无传感器启动方法研究[D].华南理工大学,2012.
[4]张炜.变频冰箱压缩机电机驱动控制的研究[D].广东工业大学,2011.
猜你喜欢
上海大中型电机(2021年2期)2021-07-21 03:01:32
防爆电机(2020年6期)2020-12-14 07:16:54
光学精密工程(2016年3期)2016-11-07 09:03:49
设备管理与维修(2016年7期)2016-04-23 06:51:55
大电机技术(2015年5期)2015-02-27 08:22:28
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54
自动化博览(2014年4期)2014-02-28 22:31:12
汽车电器(2014年8期)2014-02-28 12:14:29
河南科技(2014年23期)2014-02-27 14:18:59
河南科技(2014年3期)2014-02-27 14:05:52