
三维激光扫描技术及其在炼厂改扩建项目中的应用
2017-08-30 10:09张林杰郭若成
测绘通报 2017年8期
张林杰,张 彪,徐 华,郭若成
(青岛中油岩土工程有限公司,山东 青岛 266000)
天宝测绘解决方案专栏
三维激光扫描技术及其在炼厂改扩建项目中的应用
张林杰,张 彪,徐 华,郭若成
(青岛中油岩土工程有限公司,山东 青岛 266000)
作为一项新的测绘手段,三维激光扫描技术以其高速、高精度、非接触的测量特点,应用越来越广泛。从20世纪90年代的每秒1000点到如今的超过100万点,其扫描速率有了多个量级的飞跃。同时其扫描精度也越来越高,100 m内测距精度优于2 mm。本文以天宝TX8三维激光扫描仪为例,介绍三维激光扫描测量的作业流程及三维激光扫描技术在炼化厂区改扩建中的作用。
1 某炼厂分馏装置区升级改造项目三维激光扫描测量
某炼厂分馏装置区由于设备老化,需要改建同时在原来基础上进行扩容。设计院根据业主要求开展设计工作,由于没有竣工图,遂委托笔者所在单位开展现状图测绘工作。分馏装置区占地10 000 m2,装置区内各种工艺管道分布错综密集,采用常规测量手段无法开展测绘工作。根据测区的特点,经过与设计人员沟通,决定采用三维激光扫描技术进行数据获取,以最大限度地呈现装置区的现状。
1.1 投入的人员和设备
本次作业采用三维激光扫描仪一台,作业人员2人,扫描站数137站,采集点云数据170 GB,工作周期3 d。
1.2 扫描工作流程
测区踏勘—编制工作计划—控制测量—设站规划—测站扫描—全景影像拍摄—内业数据传输—影像拼接—去噪—影像、点云匹配—点云拼接—点云及实景浏览成果输出。
1.3 控制测量
控制测量的目的有两个:一是将扫描坐标系转换为工厂坐标系;二是控制点云拼接时产生的累积误差,提高拼接精度。控制测量可采用GPS或全站仪导线法施测。测量前应验算投影变形,当变形值超限时,应建立独立坐标系,以免投影变形产生的误差影响点云精度。独立坐标系应与厂区坐标系联测一个公共点和一个公共边,以保持坐标系统的连续。本项目采用全站仪按照一级导线的测量要求施测,高程控制网测量采用三角高程法施测四等水准,如图1所示。
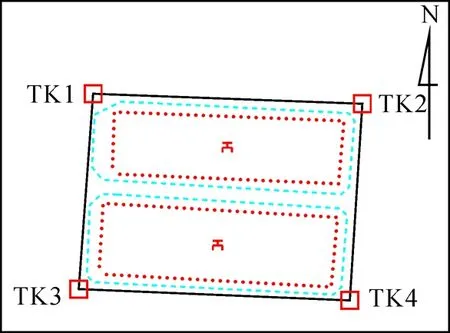
图1 控制点布设
扫描坐标系和控制网联测时,应在4个控制点处摆设球形标靶。标靶中心的坐标经点云拟合得到,高程通过量测标靶中心至地面控制点的垂直距离反算获得。
1.4 设站规划
开始扫描前,应对测区地物复杂程度、通视条件、地物距离、地物表面反射率等情况进行勘查,设站点应使扫描仪发射的激光到达扫描范围内所有地物的表面,从而获得地物表面的点云数据。当地物因遮挡不能被扫描到时,应变换仪器高度或改变设站位置补充扫描,最终获得所有地物的表面点云数据。
点云的后期拼接可采用标靶拼接,也可采用公共点云拼接。采用标靶拼接时,两站间的公共标靶数量一般不应少于3个;采用公共点云拼接时,两站间的点云重合率不应少于20%。 因此在设站规划时,应考虑标靶的摆放位置和站间重叠度问题。本项目共测设137站。
1.5 扫描实施
根据设计好的测站位置架设仪器,然后进行整平,同时打开仪器的倾斜补偿器。检查电池电量和仪器内存情况,保证扫描的连续作业。
根据测站范围内最远地物至仪器的距离、最小地物的尺寸和业主要求的最大点云间距等确定扫描档位。点云密度应能拟合出地物的完整形状,且拟合偏差不应大于30 mm。一般情况下,最大点云间距不应大于25 mm。
确定扫描档位后,开始扫描。扫描过程中,禁止触碰扫描仪,并时刻关注周围人员和车辆动向,保证仪器安全,防止扫描通道遮挡。测站扫描完成后,应立即检查点云情况,总体查看是否有漏扫现象,然后放大细节,查看点云密度是否符合要求。对于点云数据获取不理想的区域,可框选该区域,选择合适的档位进行局部重新扫描,两次扫描的点云会自动拼接。检查合格后,保持脚架和基座不动,将扫描仪拆卸后,安装相机进行全景影像采集。
1.6 影像采集
天宝TX8三维激光扫描仪内没有集成高像素相机,影像的采集需要采用外置的Cannon 5D markⅡ单反相机完成,相机配置鱼眼镜头。
拍照前应将相机固定到专门的云台上,调整相机中心与云台的旋转中心重合,然后将云台安放至测站的基座上,此时相机中心与扫描仪的测量中心基本重合。调节相机焦距、快门速度和光圈大小,使成像清晰,然后开始拍摄。拍摄时,水平方向每隔60°拍摄一张照片,共拍摄6张照片,然后旋转相机,在天空和地面方向各拍摄1张即可。如果天空方向和地面方向能拍摄到的特征地物比较少,可以调节方向多拍几张照片,以便后期全景照片拼接。
如图2所示,内业中采用拼图软件进行全景图制作。
1.7 内业数据处理
外业扫描完成后,应及时将数据下载,以保证数据的安全。内业中,采用Trimble Realworks 10.0软件对点云进行去噪、着色、拼接、坐标转换等,并根据业主要求对点云进行抽稀处理,输出点云数据和实景浏览成果。

图2 全景影像
每站的点云数据应首先进行去噪处理,将测区以外的点云或人、车等无关要素形成的点云进行删除。然后将每站的点云与全景影像进行匹配,赋予点云RGB颜色(如图3所示)。
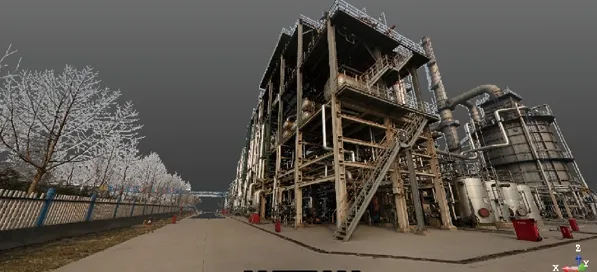
图3 单站RGB点云
最后通过Realworks 10.0软件进行整体拼接。点云整体拼接可以采用标靶或点云自动匹配拼接。当地物特征点较少或点云重叠度较难保证时,应采用标靶拼接。当测站间地物公共特征点较多时,可采用点云自动匹配。本项目采用点云自动匹配方式进行点云拼接。拼接精度统计见表1。
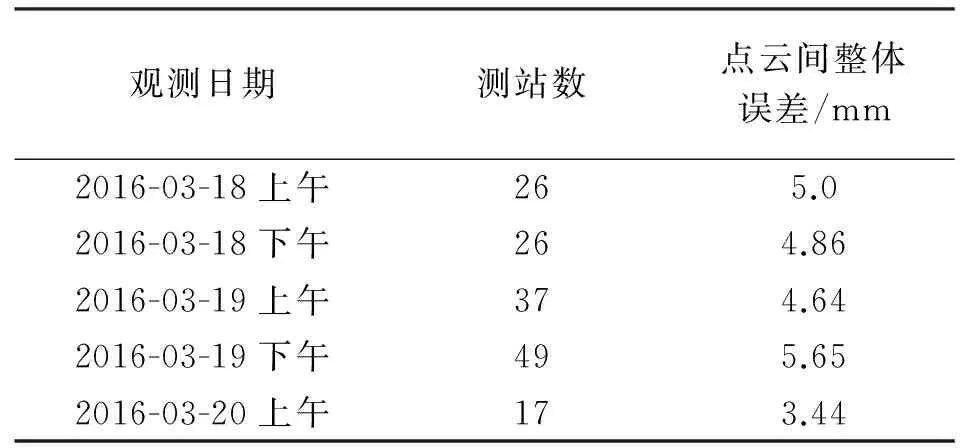
表1 点云拼接精度统计
拼接完成后的整体点云如图4所示。
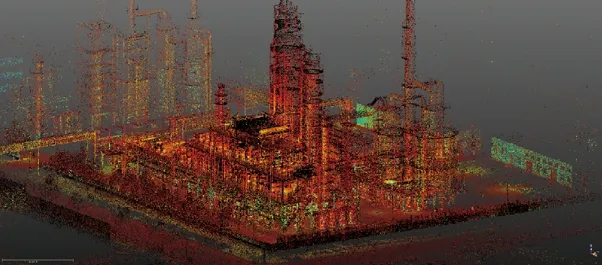
图4 整体点云效果
点云拼接完成后,由于测站间重合点云较多,点云密度较大,数据冗余较多,此时应对点云进行抽稀处理。抽稀时,应按照最小地物的特征点精度不损失的原则,且最大点云间距不应超过25 mm。
点云的坐标系统转换时,将实际坐标赋予标靶即可完成转换,参与转换的标靶数量不应少于3个。均匀抽取一定数量的地物特征点查询坐标,然后与全站仪实测的坐标值进行比较,其差值不应大于50 mm。
1.8 点云成果应用
通过Realworks 10.0软件,可以对点云进行分割和多颜色显示,并可在点云中自由行走浏览,对特征点进行量测,但因点云是离散的点,在复杂密集的区域不便于细节区分。此时可生成实景浏览成果,如图5所示。在此模式下,可以调整测站的视角,身临其境查看地物现状情况,进行实时的空间距离和坐标量测,并可将设计意见进行实时标注。
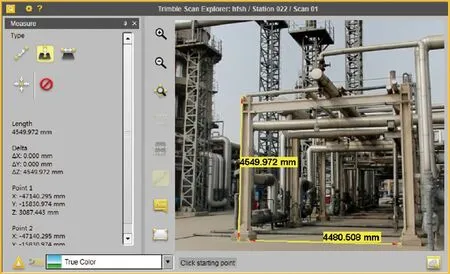
图5 实景浏览成果
当业主有要求时,可利用Realworks 10.0软件进行建模。对于球面、弧面、柱面、平面等规则几何体,利用点云数据采用数学算法拟合生成;对于不规则模型采用不规则三角网方式建模,Realworks 10.0软件中自带的Easy Pipe模块,可快速实现管道建模。Realworks 10.0也可将点云数据导出至3D Mark软件中进行辅助建模。
2 三维激光扫描技术与常规测量技术的比较
2.1 测量精度
三维激光扫描仪的测距精度已达到2 mm(100 m范围内)。点云通过软件自动拼接,其点云间相对精度较高,点云的整体拼接误差均优于1 cm,远远低于《工程测量规范》中工矿区主要建筑物点位误差5 cm的要求。
2.2 测量速度
传统的全站仪、GPS测量均是一点一点的测量,而三维扫描仪的测量速率为每秒100万点。一次典型扫描,3 min内即可将100 m范围内的所有地物特征点采集完毕,作业效率是常规测量的十倍乃至百倍。
2.3 作业模式
全站仪、GPS测量均要求棱镜或GPS接收机放置在地物特征点上,对于炼厂区等高危作业区,高耸建筑较多,层叠排布的管廊和装置上人员难以站立,使用常规测量方法无法施测。三维激光扫描仪通过发射激光进行非接触式的测距,可在1~2 min内完成100 m外的物体特征点的采集。三维激光扫描仪更适合复杂建筑物的测量。
2.4 成果形式
全站仪和GPS的测量成果为单纯的坐标值,三维激光扫描的成果为带有空间三维坐标的点云。编辑点云时,可以进行裁剪、断面切片、等高线生成、正射影像图制作、三维建模等操作,使成果样式丰富多样。
3 结 语
三维激光扫描技术以其高精度、高速率、非接触测量、成果三维显示等优点,在越来越多的行业中得到应用。三维激光扫描技术不仅改变了测量人员的作业方式和测量成果的展现形式,同时也改变了设计人员的设计方法和方式。目前,炼化设计院要求所有项目必须进行三维设计,这样做一是为了向业主更好地阐述设计方案,更重要的是检查设计方案的准确性和合理性。三维扫描成果已在哈萨克斯坦PK炼厂改造项目和阿联酋FST项目中成功运用,将来也必定会作为设计输入得到越来越多的应用。
猜你喜欢
现代仪器与医疗(2022年2期)2022-08-11
测绘地理信息(2022年2期)2022-04-02
文萃报·周五版(2021年45期)2021-11-17
陕西水利(2021年5期)2021-06-21
全球定位系统(2020年1期)2020-03-31
模具制造(2019年3期)2019-06-06
测绘通报(2017年2期)2017-03-07
世界博览(2015年20期)2015-09-10
现代营销·经营版(2015年3期)2015-04-20
大地测量与地球动力学(2014年3期)2014-02-13
