
外业测量因素对多波束测深系统的影响分析
2017-08-29 14:32:43常列
河南科技 2017年13期
常列
(广州海事测绘中心,广东 广州 510000)
外业测量因素对多波束测深系统的影响分析
常列
(广州海事测绘中心,广东 广州 510000)
本文主要介绍外业测量中多波束换能器安装、船速、船体震动以及测区声速对多波束测量的影响。通过对比不同条件下多波束测深系统采集数据的质量,分析外业因素对所采集数据的影响,以期为使用小型船舶测量的外业参数提供参考。
多波束测深系统;换能器;GPS;流噪声;空化
1 多波束测深系统
多波束测深系统(Multibeam Echo Sounder,MBES,以下简称多波束),又称为多波束测深仪、条带测深仪或多波束测深声呐等,能快速准确地获取大面积海底形态信息,为海底地形地貌勘测提供了一种有效手段[1]。
使用多波束进行外业采集时,换能器的安装、船速、船体震动及声速等外业因素对数据采集有较大影响。特别是使用小型船舶进行测量任务时,换能器的安装位置决定了作业是否安全、采集效率的高低及采集数据的质量;采集作业时,船速的快慢直接导致换能器位置气泡的多少;船体的震动则影响换能器的采集质量。为了保证测量质量,要尽量降低各外业因素对采集数据的影响[2]。本文主要分析换能器安装、测量船舶及测区声速三个因素对多波束数据采集的影响,最终获取最佳外业因素设置参数(适用于长度不超过20m,宽度不超过6m的小型船舶)。
2 换能器安装影响分析
2.1 测深架的安装
换能器的安装对多波束数据采集的质量影响是第一位的,安装过程中需要考虑换能器的安装位置、测深杆如何垂直船体以获取最小震动效果。本次分析过程中,测量船舶为长14m,宽4m的小型测量船。在综合考虑测量船舶的发动机、螺旋桨位置等后,最终选取测量船舶的右前方安装换能器。该位置远离船舶螺旋桨和发动机,船体挠曲较小,测量时可以避免过往船只的影响。
测深架采用上下垂直两点固定、前后绳纵向固定、过底钢缆横向固定的安装方式。出于后期数据处理方便考虑,GPS安装在测深杆处,后期无修正(见图1)。
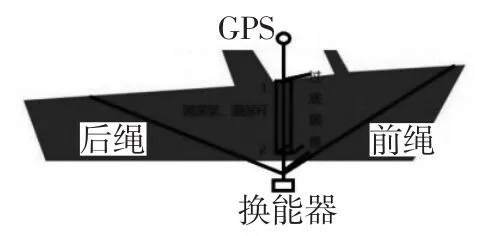
图1 多波束安装示意图
2.1.1 测深杆规格选取。多波束换能器、测深架体积较大,重量约50kg。测深杆受弯不足时容易导致换能器强烈震动,影响采集数据,产生蝴蝶状数据(不可逆)。测深杆震动状态采集数据见图2。
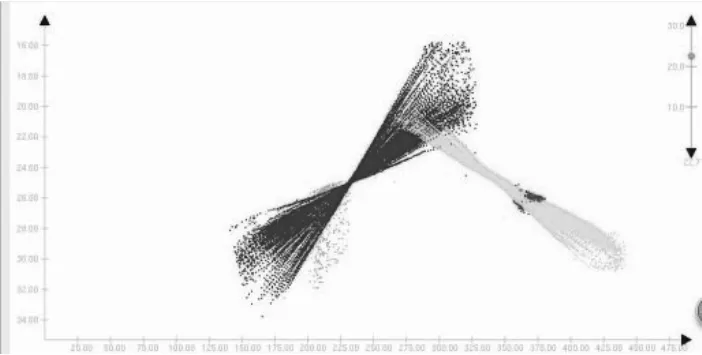
图2 测深杆震动状态采集数据
考虑到测深杆承受力,主要分为以下两种情况:①拉力:拉力除以钢管截面积小于钢管允许拉应力即可;②受弯:局部最大应力应小于超过允许应力。
其中,最大弯曲正应力的计算公式是:σ=M/(γx× Wnx)。最终根据计算选取83mm×2.5mm规格钢管。震动减弱后蝴蝶状数据现象消失。
2.1.2 测深杆固定点选取。如图1所示:实验船舶选取1、2两点为测深架上下固定点。尽可能减少行驶过程中对换能器的震动影响(见图3)。
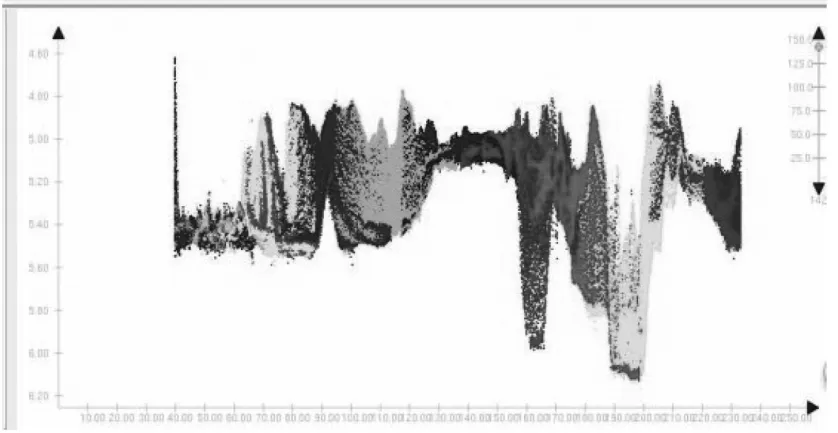
图3 测深杆震动消除状态采集数据
2.2 多波束探头深度选取
外业采集中,换能器的吃水深度主要取决于以下几个因素。
2.2.1 采集区域波浪大小。波浪较小区域且采集区域水深普遍较小时,换能器深度可适当小一些,这可以避免因吃水过深导致采集范围窄,以及水深过浅时导致换能器碰撞。波浪较大区域流噪声较大,换能器处容易产生气泡,影响采集效果。可根据测区水深调节换能器吃水量。
2.2.2 采集船舶时速大小。一般在以6节时速进行采集时,换能器吃水调节超过1m,这是为了避免流噪声过大产生气泡。
3 测量船舶影响分析
3.1 机械噪音
测量船舶产生的噪音主要由发动机、螺旋桨、发电机、过往船舶等引起。其中,发动机、螺旋桨和发电机可看作是测量船舶自身震动,过往船舶和其他因素引起的噪音可以看作是外力震动。
3.1.1 自身噪声震动。测量过程中,船舶自身的发动机、螺旋桨以及采集过程中过往船舶为引起震动的主要因素。其中,螺旋桨占有害震动的70%(船舶的主要激励)。因此,多波束换能器应尽量远离螺旋桨,考虑到船体挠曲率的影响,最终选取测量船舶右前方三分之二处。该位置远离螺旋桨和发动机,船体挠曲较小,船面及船体吃水处两点可垂直。
3.1.2 外力噪声震动。测量时,测区一般有较多来往船只,测量船需尽量远离过往船只,尽量减少因过往船只经过造成的气泡影响。①尽量顺航道进行测量,避免安全事故的发生;②当测线内有船舶在前方时可减速或者更换测线,避免因前方船只产生气泡而导致的数据质量差等情况的发生。
3.2 流噪声及空化
船舶的流噪声主要是由船体与海水碰撞导致的。因此,在测量时需要控制船速,避免因速度过快在换能器处产生大量气泡。本次测量船舶的船速控制在6节内。
水力空化是指在液体经过的管道某处人为制造低压强、高流速的状态,当液体压强小于饱和蒸汽压时,液体中的气泡就会不断膨胀,体积变大。而大量气泡导致的结果就是换能器声速接收困难,从而导致测量不准甚至失败。
3.3 船体挠曲
由于采集船舶外船舷并非直上直下,一般为从上开始向内弯曲。为了保证换能器与水面垂直,需在船体下面安装固定点,如图1中点2的位置。
4 声速影响分析
测量工作中,声速主要取决于由三个参数:盐度、温度、压力。
由于本次采用的多波束不含表层声速仪,因此,测量时需要对声速进行实时改正。改正方法为:①测区内每2km进行一次声速测量;②河口、入海口等处实时测量声速进行修正。
5 结语
在使用多波束进行外业测量时,为保证采集数据规范、正确,需对影响采集的外业因素进行实时矫正。根据测量船舶情况确定换能器的安装位置,测深架需要减弱或避免震动带来的影响,在没有表层声速仪时需要对声速进行实时改正。本文对小型船舶进行测量具有较强的参考价值。
[1]国家质量技术监督局.GB12327-1998,海道测量规范[S].北京:中国标准出版社,1999.
[2]国家测绘局.CH1016-2008,测绘作业人员安全规范[S].北京:测绘出版社,2008.
Analysis of Influence of Outside Surveying Factors on Multibeam Echo Sounder
Chang Lie
(Guangzhou Marine Surveying and Mapping Center,Guangzhou Guangdong 510000)
This paper mainly introduced the field measurement of multibeam transducer installation,speed,vibration and sound velocity measuring area hull of multibeam measurement effect.By comparing the quality of data collected by multibeam echo sounder under different conditions,this paper analyzed the influence of foreign factors on the collected data.The author hopes that the research in this paper can provide reference for external parameters of small ship survey.
multibeam echo sounder;transducer;GPS;flow noise;cavitation
P229.1
A
1003-5168(2017)07-0097-02
2017-06-02
常列(1985-),男,本科,助理工程师,研究方向:海洋测绘。
猜你喜欢
西部交通科技(2021年9期)2021-01-11 12:55:36
智能建筑与智慧城市(2018年11期)2018-11-28 09:04:14
中国资源综合利用(2017年2期)2018-01-22 02:45:02
声学与电子工程(2017年1期)2017-06-22 11:30:06
声学与电子工程(2017年1期)2017-06-22 11:29:57
中学生数理化·八年级物理人教版(2016年7期)2016-12-24 09:46:57
中国房地产业(2016年2期)2016-03-01 01:25:35
雷达与对抗(2015年3期)2015-12-09 02:39:00
电源技术(2015年2期)2015-08-22 11:28:12
航空学报(2015年4期)2015-05-07 06:43:32
