一种可辅助转移的多姿态智能轮椅的设计
2017-08-23 01:19刘诗怡鲁鹏
科技创新导报 2017年16期
刘诗怡 鲁鹏

摘 要:针对现有普通轮椅控制智能化和功能多样化的发展方向,该文在考量了不同病患的不同需求,充分调研病患起居生活的基础上,设计了一种可供广大肢体病患独立自主使用的辅助起居机械。该文通过对轮椅的驱动模块、调角模块、升降模块、辅助转移模块等部分结构的设计,得到了一款融普通轮椅、休闲椅、担架于一体,可实现辅助转移、自动升降椅面、自动行走及转向等功能的新型助残轮椅,操作简单,方便折叠,具有较强的市场推广价值。
关键词:转移辅助装置 自适应平台对接 多角度调节 电动控制 折叠
中图分类号:TP24 文献标识码:A 文章编号:1674-098X(2017)06(a)-0116-03
1 背景分析与意义
随着社会老龄化进程的加快以及肢体残疾患者的不断增多,普通轮椅的单一功能已经渐渐满足不了这些行动不便者们日常生活的多样需求了。例如,传统轮椅需要病患家属将病患从沙发等位置人为地搀扶甚至抱起放置于轮椅之上,这极大地增加了病患家属在照顾病患过程中的疲劳强度,并且可能对病患造成二次伤害。又如,当今市面上形形色色的轮椅、担架、休闲椅,传统结构中这3种设备互相独立,人们需单独购买、使用,造成材料利用率低下与人们时间、金钱的浪费,并且现有产品大多依靠人力驱动,使用者需配合他人,费时费力。
为改善现有结构以及解决上述所面临的问题,我们对可辅助转移的多姿态智能轮椅做出如下设计。
2 轮椅结构设计
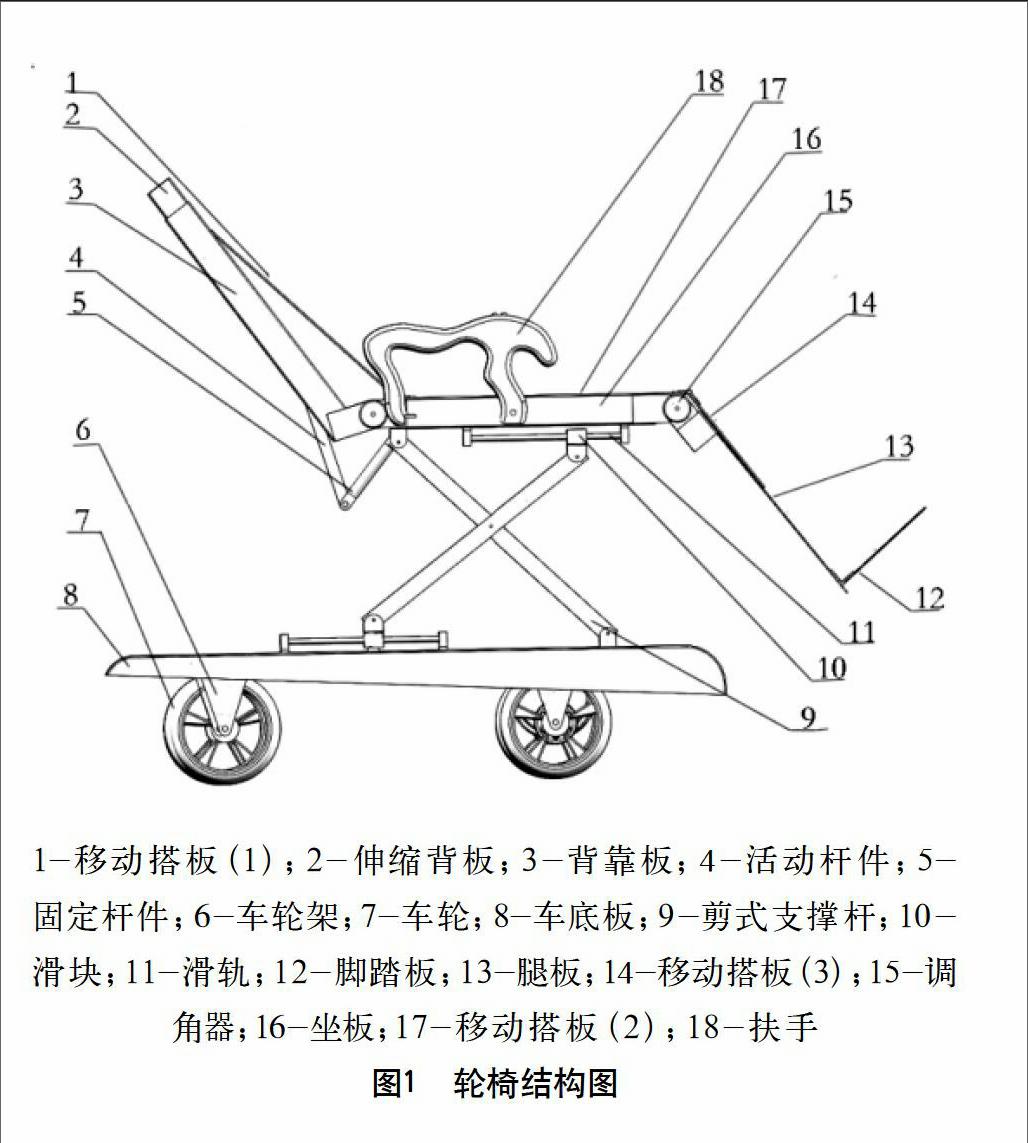
可辅助转移的多姿态智能轮椅采用模块化设计思想,由驱动模块、调角模块、升降模块、辅助转移模块、附加结构部分组成,如图1所示。
2.1 驱动模块
轮椅驱动机构由电机、电源、减速装置等组成。由12 V蓄电池提供动力能源,采用后轮驱动,利用磁力制动器和传感器实现智能遥控的转向刹车功能。转向过程中差速转动,能在车体变化(车身角度、高度变化、功能切换)的情况下仍然具有灵活的移动性能。此外,安装于车底板8下方的电池盒与车底板8之间,车轮架6与电机支架间均采用螺栓连接,便于拆装。
2.2 调角模块
轮椅的靠背板3、坐板16及腿板13之间采用电动调角装置对三者之间的夹角进行调整和锁止,调角装置由调角器15、调角电机、调角器连杆23(图3所示)组成,调角器连杆23为花键连杆,与调角电机和调角器15相互配合,调角电机带动调角器连杆23转动,而后带动固定于靠背板3外侧的调角器15,从而实现靠背板3与坐板16间夹角的改变。腿板13与坐板16间角度调整同理。
通过以上两处调角器间的相互配合,轮椅可实现普通轮椅、平躺担架(床)、休闲椅以及折叠4种不同的姿态。
2.3 升降模块
在轮椅车底板8上表面以及坐板16下表面两侧分别安置纵向滑轨,车底板3和坐板16之间由剪叉式升降-滑轨结构相连,剪式支撑杆9前方两支点铰接于支撑杆固定端耳片22(图3所示)上,后方两支点铰接于滑块10上,通过调节埋置于车底板下方的电动推杆的长度来改变剪式支撑杆铰接角度的变化,驱动剪叉机构升降支撑。
通过调角部分调节座椅各板面间夹角为零并调节坐板高度为最低即可实现车体的完全折叠(如图2所示)。
2.4 辅助转移模块
在轮椅的靠背板3、坐板16及腿板13之上附有移动搭板(1)1、移动搭板(2)17、移动搭板(3)14,在移动搭板(2)17下方与坐板16间采用齿轮齿条机构连接,通过电机带动齿轮,从而带动齿条实现轮椅移动搭板的横向平移。
在担架模式下,首先调节高度使椅面升至与床面平齐,随后控制移动搭板横向移出,移动搭板移出一侧的底面安装有平台滚珠,在移动搭板纵边与床面搭接后可顺利滑动,而后病患自主或需陪护人员轻微协助转移至床上即可。
2.5 附加结构
(1)扶手。
扶手18与座椅有两个连接处,在正常情况下使用时,扶手前端通过销轴固定于椅面两侧,扶手后端通过扶手限位块19固定角度,实现转移功能时可将扶手后方拉起旋转180°至车身下方,不妨碍移动搭板的推出。
(2)靠背及靠枕。
靠背板3中设有可伸缩调节的伸缩背板2,伸缩背板2下缘铰接两处活动杆件4,同时坐板16后侧边缘固接有两处固定角度的固定杆件5(固定杆件可拆卸),活动杆件4与固定杆件5间分别铰接相连。此连杆装置可使伸缩背板2随靠背板3角度的变化而伸缩,在靠背板3水平放置时伸缩背板2伸至最长。另外,在将轮椅靠背板3折叠起来之前,需要提前把固定杆件5的固定端卸下。
(3)腿板和踏板。
轮椅的腿板13下端铰接有矩形脚踏板12,脚踏板12不用时可向上旋转收起。
3 控制系统
轮椅的控制模块采用89S52单片机为主控,外接驱动模块L298N连接驱动电机、角度调节电机以及GSM模块,通过按键实现轮椅的自动运动、角度自动调节以及紧急情况自动报警等功能。
该设计需提供+12 V和+5 V电源,DC+12V由12 V充电电源提供,DC+5CV由直流+12 V经7805转换得到。为单片机及其他电路提供工作电压,直流12 V主要为电机提供驱动电压。
硬件结构图如图4所示。
驱动电机与角度调节电机均采用直流電机,电机速度的调节均通过单片机输出PWM波来实现。智能车轮的转向采用差速转向思想。GSM模块选用SIM900A模块,当遇到紧急情况,通过按键进行短消息发送,达到报警的目的。另外,用户可以通过发送短信,由GSM模块接收,经单片机解码,去执行相应的紧急处理措施。
4 轮椅功能简介
通过车体的多种调节和变形功能使其能够适应多种不同环境不同使用者的需求,提高了工作范围与机动性能。
(1)作为轮椅。
当调节靠背板3与坐板16间夹角至90°或接近90°,坐板16与腿板13间夹角至适宜角度时配合行走装置可作为普通轮椅使用。
(2)作为担架。
担架模式主要是为自动转移功能服务,在担架模式下,病患可以电动唤醒转移功能,轮椅移动搭板将与轮椅平面发生相对运动,将病患平移至床或者沙发上,或者从床到轮椅,全程无需家属参与,安全可靠。同时担架模式可以为患者提供午休的功能,紧急情况可执行普通担架的救护功能。
(3)作为休闲椅。
使用者可适当根据个人喜好调节腿板13与坐板16、靠背板3与坐板16间的角度使自己感到舒适,休闲椅状态同樣可以满足病患看书、午休、就餐等多元化的生活需求。
5 模拟样机
通过以上描述,研究人员最终将其加工制作得到了可实现上述功能的轮椅,它的整体外观如图5所示。
6 结语
文章在分析目前市场上轮椅存在的缺陷基础上,对现有轮椅的功能进行了拓展和完善。
辅助转移模块利用齿轮齿条机构实现轮椅与床的对接过程,极大地降低了病患家属在照顾患者过程中的疲劳强度,最大程度为病患提供自理自助的条件。设计集轮椅、担架、休闲椅3种传统结构的功能于一体,不仅适应人们不同的需求,体现了产品的高效性,满足了使用者多方面的需求;可升降式车体利用剪式升降结构与电动推杆的伸缩配合实现车体的升降,车身的不同放置方式使其最大程度折叠和升降,也减少了空间的不必要占用;机电一体化的设计,实现车轮的自动化驱动,手机或者按键等智能化管理方便人们对轮椅的控制,节省人力资源,也增加了使用的趣味性;自适应椅背伸缩等机械结构的设计,令可辅助转移的多姿态智能轮椅在传统轮椅基础上进一步扩展了使用功能,具有良好的实用价值。
参考文献
[1] 机械设计手册编委会.机械设计手册:起重运输机械零部件[M].北京:机械工业出版社,2007.
[2] 李振清.机械设计简明手册[M].北京:兵器工业出版社,1993.
[3] 杨可桢.机械设计基础[M].北京:高等教育出版社,1979.
[4] 李哲英.电子技术及其应用基础[M].北京:高等教育出版社,2003.
[5] 戴雅丽.自动控制原理与系统[M].北京:中国林业出版社,2005.
[6] 林涛.数学电子技术基础[M].北京:清华大学出版社,2006.
[7] 蔺海荣.材料力学[M].北京:国防工业出版社,2001.