BDS系统与雷达信息融合研究
2017-08-16 09:33:33赵永刚
电子测试 2017年14期
赵永刚
(91245部队,辽宁葫芦岛,125001)
BDS系统与雷达信息融合研究
赵永刚
(91245部队,辽宁葫芦岛,125001)
对雷达和BDS的数据进行了介绍,对其特点进行了比较,并介绍了两者数据融合的结构模型。主要介绍了雷达和BDS在数据预处理、以及航迹关联和航迹融合的现况。
雷达;BDS;信息融合
0 引言
中国北斗卫星导航系统(BDS)是一种新的导航系统,可以在范围为各类用户全天候、全天提供高精度、高可靠的定位、导航和授时服务,具有短报文通信能力,具有区域导航、定位和定时的能力,定位精度10米,0.2米/秒的测量精度,10纳秒的时间精度。然而,作为一个具有全景监视能力的自主检测设备,雷达的功能仍然是不可替代的。通过雷达和BDS信息相结合,船舶航行安全信息系统可以实现彼此的优势互补,从而发挥更大的作用在船舶航行安全。雷达和BDS信息融合是信息在时间和空间上是统一的前提下,最关键的是跟踪相关的决定,这是形成最终的轨道[1]。
1 雷达与BDS的数据特点
在获取信息的方法中,雷达是一种有源传感器,它通过发射电磁能量和接收两个散射回波来获得目标的位置和运动参数。因此,雷达可以获得全景图像的交通图像,除了所有的移动目标,静止和静止的目标,和其他环境信息。此外,雷达目标回波可以在一定程度上反映目标的大小和形状。目标的BDS的检测是非自主的,它只能接收船舶信息与BDS系统。BDS信息包括位置、航向、速度、距离等动态信息。两个传感器的信息特征如表1所示。

表1 雷达与AIS的信息特点比较
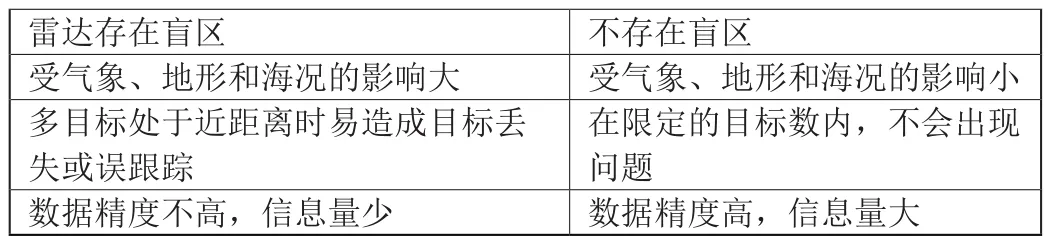
雷达存在盲区不存在盲区受气象、地形和海况的影响大受气象、地形和海况的影响小多目标处于近距离时易造成目标丢失或误跟踪在限定的目标数内,不会出现问题数据精度不高,信息量少数据精度高,信息量大
2 信息融合结构模型
由于雷达信息处理系统和BDS是独立的,以较低的价格拥有较高的可靠性和可用性的分布式结构,减少数据总线的带宽和数据处理的要求,与集中式结构相同或相近的精度。因此,雷达和BDS进行信息融合,使用分布式结构,如图1所示。
3 数据预处理
数据预处理主要由坐标变换及时间对准组成。由于雷达和BDS观察时间不同,空间参考点,双方的数据应进行预处理,为了方便信息融合。
3.1 坐标变换
BDS和雷达有不同的方法来描述目标的位置。目标的位置数据通过BDS是来自船舶的BDS是纬度和经度的地理坐标表示。雷达目标位置以距离和方位极坐标表示。为了便于后续处理,这两个被转换为直角坐标系,如图2所示。
图中,rT表示雷达获得的目标位置,aT表示BDS获得的目标位置,(rX,rY)表示雷达信息数据的直角坐标,(aX,aY)表示BDS信息数据的直角坐标。

图1 雷达与BDS数据融合模型
3.1.1 BDS数据的坐标变换
BDS接收机提供的目标位置数据格式是WGS-84坐标系,经常用以下两种方法将其转换成直角坐标。
高斯-克吕格投影:高斯-克吕格投影是一个横向切向的椭圆柱面投影。这是一个椭圆柱横切地球椭球,椭球相切的椭圆柱面作为经线的投影,称为中央经线,然后根据一定的约束条件,如投影条件,将中央子午线的投影范围内双方提供椭圆柱面,从而得到高斯的投影点。

图2 雷达与BDS目标位置数据坐标变换示意图
近似计算:计算公式
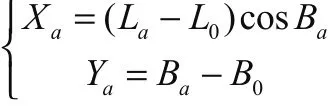
其中,(L0,B0)表示本船的地理坐标,(La,Ba)表示BDS目标位置数据的地理坐标。
在方法1中BDS的目标位置数据的坐标转换是非常复杂的,并对该公式的准确性和局限性值得探讨。此外,这种方法很难实现计算机的快速计算,而且处理海量数据比较困难。在方法2中,转换方法简单方便,但采用近似公式,即不能保证同一水平面上被测目标的精度。
3.1.2 雷达目标位置数据的坐标变换
雷达目标位置数据的坐标采用极坐标,表示为距离R和方位θ,将其转换为直角坐标系的计算公式为[2]

3.2 时间对准
通常雷达的扫描周期较为固定且时间间隔相同,因此雷达信息时间间隔稳定。BDS信息在不同状态下时间间隔是不同的。所以需要对雷达和BDS目标信息进行时间对准。
时间对准通常采用以下三种方法。
3.2.1 最邻近规则试探法。
假设在一个时间段内BDS和雷达的采样时刻分别如下:BDS采样时刻序列:雷达采样时刻序列:把这个时间段内BDS和雷达的采样时刻序列聚为一个集合。式中n=f+t。在此基础上,使用最近邻规则启发式的时间对准,即,均匀的采样时间序列被确定。
3.2.2 自适应时间对准。
分析由于方法2将使用自动调节采样时刻作为基准数据,采样点比方法1多;而且减少了对时刻的计算,因此避免了误差产生的机会,所以在理论方法2比方法1要好。
3.3 BDS信息插值和外推。
由于BDS广播信息的动态区间在舰船的不同状态的不同,雷达和BDS信息可以插或外推内两个广播间隔时间对准。例如,动态信息插值、线性时间插值和样条插值等。
4 航迹关联
雷达和BDS信息融合航迹相关,这是关键的问题,无论是从两个传感器,两轨道代表相同的目标。它解决了传感器在空间覆盖范围内的重复跟踪问题,从某种意义上说,航迹相关就是“重复”。当目标相对较远,没有干扰时,进行航迹关联比较容易。当区域内目标较多,目标相距较近,航迹存在交叉等干扰时航迹关联比较复杂。航迹关联算法可分为两类:一是基于统计的方法,二是基于模糊数字的方法。
5 航迹融合
根据实际经验表明,航迹融合可以对同一目标的航迹进行处理,可以得到目标状态估计。航迹融合的方法主要是结合位置信息接收的BDS根据精密测量雷达的位置信息,从而提高跟踪精度。此外,如果雷达探测的目标丢失或接收的BDS的信息丢失,可靠性将由轨道合并改进。融合精度的观察结果取决于两个传感器,因此有必要研究如何提高单传感器的精度,如单传感器滤波的检测级融合,从而提高精度。
6 结束语
雷达与BDS信息融合是异类传感器信息融合的一个研究热点。由于能够实现优势互补,提高目标航迹的精度与可靠性,因而引起了广泛的关注。本文对基于雷达与BDS传感器的信息融合进行了系统的阐述,包括数据特点比较、信息融合结构模式、数据预处理、航迹关联和航迹融合,这些内容对雷达与BDS融合系统的设计和算法研究都具有一定的参考意义。在雷达与BDS信息融合中,仍有许多问题有待于进一步研究。
[1]花汉兵.雷达组网的特点及其关键技术研究[J].现代电子技术,2007,23:33-35.
[2]钱骏,李栋.多雷达数据融合中的数据预处理[J].火控雷达技术,2009,9:55-58.
Research on BDS system and radar information fusion
Zhao Yonggang
(Unit 91245 of PLA,Huludao Liaoning,125001)
The data of radar and BDS are introduced, their characteristics are compared, and the structure model of data fusion is introduced. This paper mainly introduces radar and BDS data preprocessing, track correlation and track fusion.
radar; BDS; information fusion
猜你喜欢
大自然探索(2023年7期)2023-08-15 00:48:21
数学物理学报(2021年1期)2021-03-29 03:14:42
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25 01:40:34
青年歌声(2019年12期)2019-12-17 06:32:32
学生天地·小学低年级版(2019年5期)2019-06-05 01:15:11
学生天地(2019年15期)2019-05-05 06:28:28
小学生学习指导(低年级)(2018年12期)2018-12-29 11:13:24
北京航空航天大学学报(2017年7期)2017-11-24 05:27:33
北京航空航天大学学报(2016年6期)2016-11-16 01:50:52
火控雷达技术(2016年3期)2016-02-06 02:30:26