
喷水推进转向式遥控渔药喷施机的设计
2017-08-08 04:57庞雄斌刘海郭翔张俊峰高星
湖北农业科学 2017年13期
庞雄斌++刘海++郭翔++张俊峰++高星星++张唐娟++万勇++罗友谊
摘要:为解决人工泼洒渔药工作劳动强度大、施药效率低且施药过程中渔药对施药人员身体的危害大等问题,利用SolidWorks软件进行建模,设计了由直流自吸水泵驱动,自动混药、施药的新型无线遥控喷水推进转向式遥控渔药喷施机。喷施机由船体、动力装置、喷水推进转向系统、施药系统、无线遥控系统以及配套的水管管路系统组成,样机机身质量约为26 kg,并对样机进行测试。结果表明,该渔药喷施机运行平稳可靠、噪音小,作业时的平均行驶速度为1.0 m/s,最大喷施效率约为2.4 hm2/h(传统的人工泼洒效率约为0.4 hm2/h),喷施效率约是人工的6倍。通过遥控控制喷施机完成渔药的喷施,保证了操作人员的安全,同时对渔药进行在线混合,从而避免喷施药液配置过多造成浪费和污染环境,适用于水产养殖。
关键词:渔药;喷施机;喷水推进;无线遥控;水产养殖
中图分类号:S224.21 文献标识码:A 文章编号:0439-8114(2017)13-2532-04
DOI:10.14088/j.cnki.issn0439-8114.2017.13.034
Design of the Hydraulic Jet Propulsion Machine for Spraying Fishery Drug
PANG Xiong-bin, LIU Hai, GUO Xiang, ZHANG Jun-feng, GAO Xing-xing,
ZHANG Tang-juan, WAN Yong, LUO You-yi
(Institute of Agricultural Mechanization Sciences, Wuhan Academy of Agricultural Science and Technology, Wuhan 430345, China)
Abstract: In order to solve a series of problems—low efficiency, high labor intensity and high harm to operators of artificial sprinkling of fishery drugs, create a modeling design by using “SolidWorks”, a complete new hydraulic jet propulsion machine for spraying fishery drug was designed which was driven by a water pump and could mix drugs automatically. The machine was composed of hull, power device, hydraulic jet propulsion system, drug delivery system, remote control system and pipeline. The sample machine was 26 kg and was tested. The testing results showed that the average speed of the machine was 1.0 m/s, the maximum spraying efficiency was 2.4 m2/h while the efficiency of artificial sprinkling of fishery drugs was 0.4 hm2/h, and spraying efficiency was 6 times of the efficiency of artificial sprinkling. The machine can guarantee the safety of operator by completing the spraying process using the remote control and can reduce the fishery drugs waste and remove environmental pollution because the way of online mixing. It was stable, reliable and applied in aquiculture.
Key words: fishery drug;spraying machine;hydraulic jet propulsion;radio remote control;aquiculture
湖北省號称千湖之省,淡水养殖居全国首位,武汉市水资源极为丰富,水域面积占全市面积的近1/4,水域面积占比居中国大城市之首。淡水养殖在湖北农业中占据极为重要的地位[1]。但是不管在湖北省还是在全国,除了个别高端的工厂化循环水养殖外,普遍而言,水产养殖的机械化程度相对不高,水产养殖施药机械比较缺乏。随着中国淡水水产养殖业的迅猛发展,水产动物病害已成为影响中国淡水水产养殖业发展的主要制约因素[2]。水产养殖中,使用渔药的目的除了调节水质外,主要是防治水产动物的疾病。药物防治作为一种最直接的控制手段,在水产动物病害防治中起重要作用[3]。
鱼病防治中常用的方法是全池泼洒法,又称遍洒法[4],具有见效快、疗效高的优点,适用小型水体、池塘等。据了解,人工施用渔药,要完成混药和人工泼洒,首先必须了解所使用药物的安全浓度,在安全浓度以下的剂量作为泼洒浓度,通过计算水体的面积和平均水深,大概估算出水体总体积和使用的药物总量,进行总量控制,均匀泼洒。如果超过安全浓度泼洒,会导致浓度偏高,鱼类中毒。人工泼洒时,在木质、陶瓷或塑料容器中加入水,使药物充分溶解,滤去残渣后,将药液均匀泼洒于水中。人工全池泼洒药液,一般需要2个人操作。1个人负责船的划行,1个人负责泼洒渔药。初步估算,1个0.33 hm2的鱼塘,若考虑充分撒匀渔药,大约需要1 h,每0.067 hm2水面需要10~15 min。渔药中的很多种类均是泼洒类药物。有的水产养殖户由于缺乏水中运载工具,全池泼洒药物变成绕池1周泼洒。这种施药方法周边一圈浓度高,中间浓度低,中间区域达不到防治鱼病的作用,导致用药效果差甚至加重疾病的暴发,不仅成本增加、浪费劳力,还可能损失惨重。全池泼洒法存在工作效率低、劳动强度大和泼洒不均匀等问题,并且在使用毒性较大的渔药时,因操作不当,还易造成人、畜、鱼中毒[5-7]。
根据上述水产养殖渔药的施用情况,无论从提高劳动生产率、降低劳动强度、提高施药的均匀性,还是施药时人、鱼等的安全方面的考虑,都有必要对渔药喷施机展开研究和开发,并尽快形成简单有效、性能可靠的产品,为农业生产服务。喷水推进转向式遥控渔药喷施机的设计将远距离遥控控制技术引入普通水产养殖领域,进一步推动水产养殖的施药机械化水平,解决渔民施药劳动强度大和效率低等问题,实现水产养殖的重要环节——施药的自动化[8-13]。本研究所研发的喷水推进转向式遥控渔药喷施机的设计主要是针对小型水体和池塘(1.33 hm2以内)水产养殖,其主要目的是为水产养殖户提供小型便携的可遥控的水中运载施药机具,代替人工进行全池塘全覆盖相对均匀的施放渔药,增加施药效果、提高水产养殖生产效率、降低渔民劳动强度以及保障人和养殖对象的安全[14]。
1 喷施机模型及工作原理
1.1 模型设计
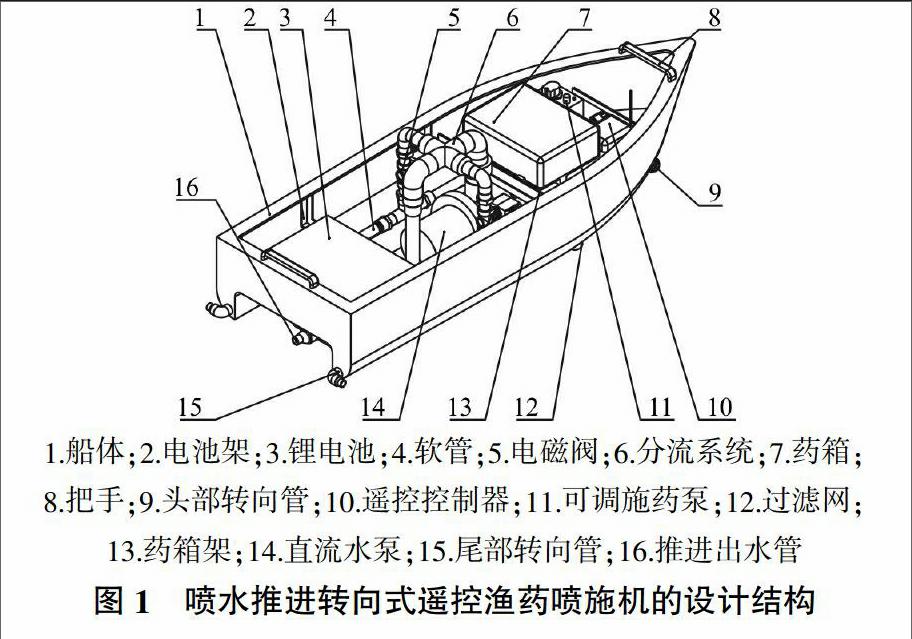
喷水推进转向式遥控渔药喷施机主要由船体、动力装置、喷水推进转向系统、施藥系统、无线遥控系统以及配套的水管管路系统六部分组成。喷水推进转向式遥控渔药喷施机的设计结构见图1。
1.2 工作原理
1)喷水推进原理:通过直流泵从船体底部吸入水,在水泵的作用下,有压水流从管道系统传送到船体尾部下端中间的喷管,经由喷管在水面下向后喷出纵向水流,在反作用力下,推动船体向前运动。
2)行进操控转向原理:在船体向前运动的过程中,由于船体运动的回转性,需要在船向前行进的过程中,对船体的前进和转向进行操控,在渔药喷施机左右两侧设置有两个常闭电磁阀,通过遥控点动控制电磁阀,接通电磁阀,泵送水流经由分流系统通过电磁阀后再分流到船头船尾,由喷管侧向喷出,形成相对水流来操控船体向右或向左转向。
3)施药工作原理:施药采用可调施药泵对药液进行微小流量精准施药,施药过程中可调施药泵能够保证流量前后一致;工作时,可调施药泵从药箱中吸入药液再送入动力水泵进水口,经水泵搅动与池塘水混合,药液被稀释后经由船体尾部推进出水管喷出,进入池塘中再一次进行扩散稀释。
2 喷施机主要零部件的设计
2.1 动力装置的设计和选型配套
喷水推进转向式遥控渔药喷施机的动力装置主要包括水泵和电池。设计根据渔药施放时噪声尽量小以免干扰鱼类等进食的要求,以及基于最大程度地实现执行动作的远距离遥控操作的考虑。喷水推进转向式遥控渔药喷施机的动力装置设计采用直流水泵泵送有压水流经船尾喷管喷出,利用反作用推动船体前进。
基于渔药喷施机轻便以及行进速度方面的要求,直流水泵的重量不能太重,在满足渔药喷施机功能要求的条件下,尽量选择重量更轻的直流水泵;并且要求功率适宜,功率太小不能满足推动渔药喷施机以较快的速度工作,甚至造成在有风的条件下无法工作,功率太大就必须选配更大容量的电源,容量越大电源的重量就会越重,并且电源采购的成本也相应增加;样机的研究主要针对中小型池塘的渔药施放、水面面积一般不超过1.33 hm2,渔药喷施机工作时间一般在30 min以内,最多不超过40 min,经过综合比对,选用XF-350型直流多功能自吸泵。水泵技术参数:额定电源12 V、重量3.59 kg、最大功率360 W、最大流量150 L/min、最大扬程10 m、最大吸程2.5 m。综合考虑电源重量、成本以及续航时间等方面,最后配套电源选用 12 V 40 ah动力型锂电池,重量3.27 kg。
随着电源技术的进步,未来电源在成本和重量下降的同时,电源容量必将大幅上升,对喷施机来说,选择的余地会更大,也会大大提升喷施机的性能,尤其是在增加续航时间和减重提速上。
2.2 喷水推进转向系统的设计与选型
在动力装置的设计和选型配套符合要求后,喷水推进转向式遥控渔药喷施机喷水推进转向系统的设计与选型配套问题就成为主要的问题,转向操控的成败决定着渔药喷施机的设计能否满足基本的功能要求,决定着渔药喷施机能否在遥控下按照用户设想的路径进行前进和左右转向。采用不同的管径、喷管组合进行多次转向操控试验,经过分析比选,最终完成了选型,实现了转向操控功能。
2.3 电磁阀的选型
根据工作压力及水泵压力,选用12 V电磁阀(2W-200-20),该电磁阀水管公称直径为20 mm,工作温度范围-5~80 ℃,工作压力0~10 kg/cm2。
2.4 施药系统的设计与选型
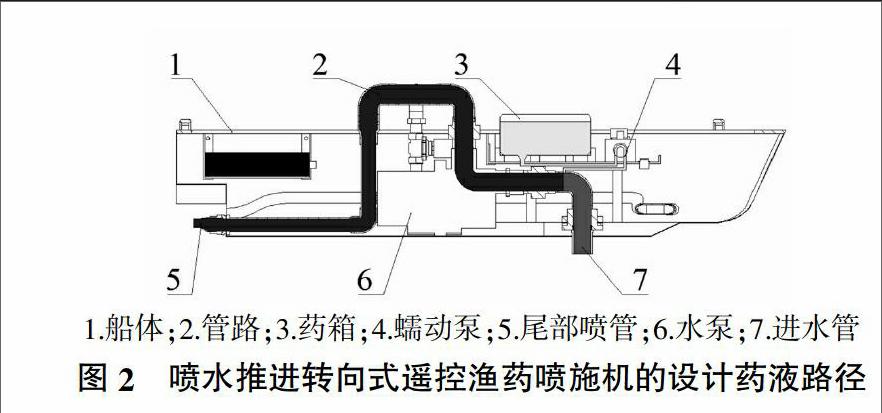
渔药施放是渔药喷施机需要完成的主要功能,渔药施放系统设计的好坏决定着渔药喷施机开发的最终成败。在进行渔药喷施机的渔药施放系统的设计时,由于渔药喷施机受动力的选配、总重量、船速、工作效率等的限制,综合考虑后,决定喷水推进转向式遥控渔药喷施机的设计采用配置2 000 mL额定容量的小药箱、装载原液(或按照一定比例稀释后的药液)的方法,通过微型可调施药泵吸取药箱中的药液,泵入水泵前端进水口,通过水泵搅合混合均匀后由尾部喷管喷射进池塘中。喷水推进转向式遥控渔药喷施机的设计药液路径如图2所示。
可调施药泵主要优点:重量轻、体积小、耗电少,原液不需要经过泵体内部,只经过泵管传输,安全无腐蚀,对于同种药液,进行施药工作时,流量可以保持始终稳定一致,实现精准施药。可调施药泵选用KCP3-S10型可调施药泵,泵头采用三滚轮形式的工程塑料,泵管可用硅胶管和BPT管。其技术参数:工作电压12 V、重量270 g、功率 5 W、流量范围19~65 mL/min(实测最大约80 mL/min)。在原液通过水泵前端吸水管道进入水泵进行第一次稀释,可以初步实现稀释比1∶1 000到1∶5 000,然后经过尾部喷管再一次喷入池塘中进行第二次稀释扩散,最后实现全池塘相对均匀的施药。
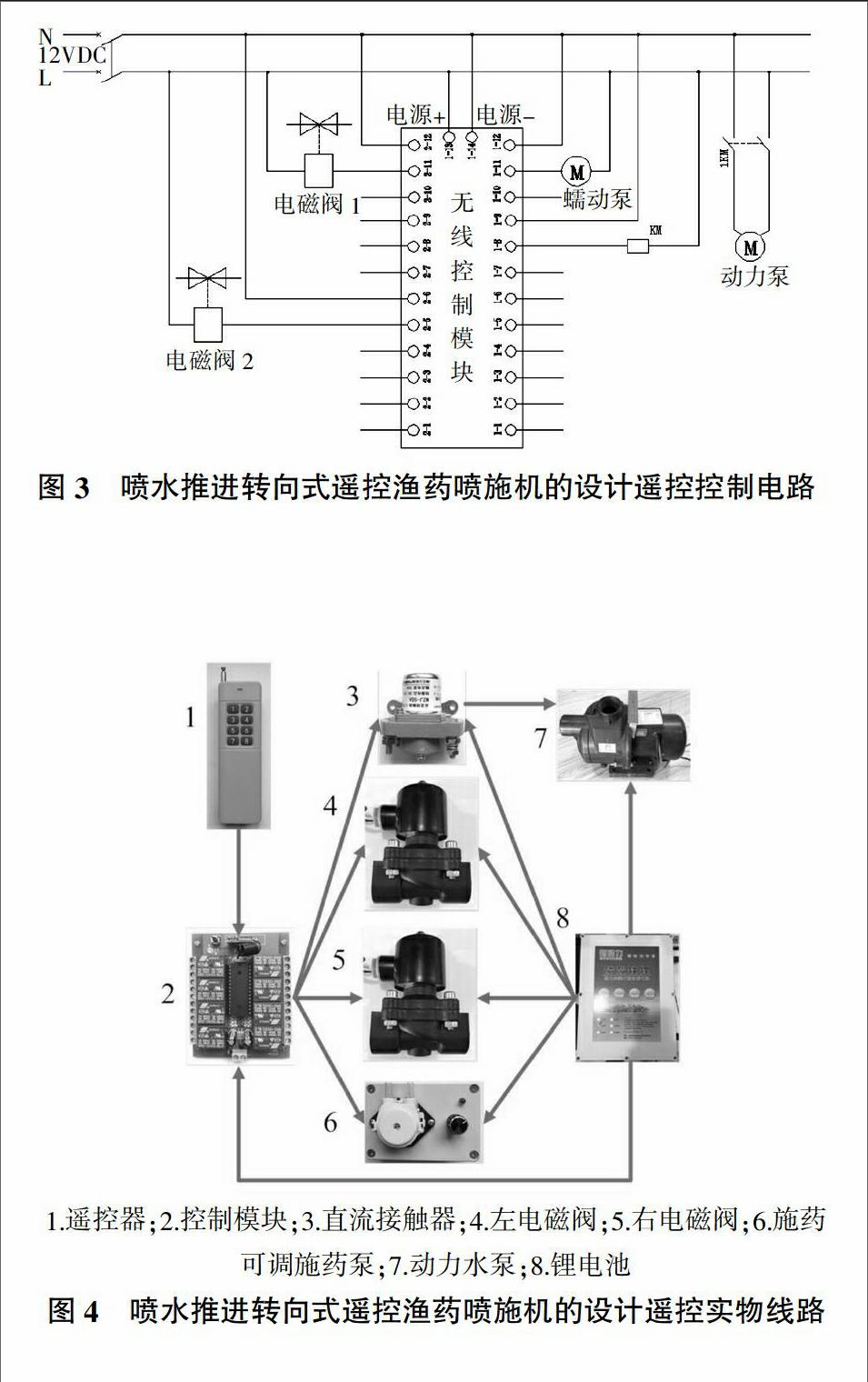
2.5 遥控控制电路的设计与实现
在进行整体方案的设计时,对于喷施机的功能和动作需要实行遥控进行统一规划,设计了遥控控制电路图,如图3所示。
在对遥控控制有了整体的设计后,喷水推进转向式遥控渔药喷施机的设计对电控系统相关部件进行了选型。遥控控制采用3 km遥控套装,12 V,8路控制,其中1~4点动,5~8自锁;经试验实测遥控最远距离约160~200 m;2路点动控制左右2个电磁阀,剩下2路点动方便维修换接;2路自锁控制动力泵和药液泵启闭;剩下2路自锁方便维修换接。在遥控控制动力水泵的开关时,测得水泵工作电流为25 A,在遥控控制开关与动力水泵之间增加了MZJ-50型(12 V)直流接触器。图4为喷水推进转向式遥控渔药喷施机的设计遥控实物线路。
3 喷施机检测和试验
分别选取钙霸、金碘、溴氧海因粉这3种不同黏度鱼药进行了渔药喷施试验,试验地点为武汉市农业科学技术研究院北部园区,鱼塘呈正方形,长100 m,宽100 m,平均储水深度约2.4 m。经对样机的实际测试,其技术参数如表1所示。样机设计如图5所示。
3.1 重量的测量
喷水推进转向式遥控渔药喷施机的设计定型初步完成后,对整机重量进行了称重,不装药液时的重量为26 kg;在进行设计时,对影响整机重量比较大的零部件进行了严格控制,不仅在部件性能上进行比选,而且也注意重量的控制,包括水泵、电源电池、电磁阀、施药系统设计、配套管道管径选择等方面,以保证整机的轻便性。
3.2 遥控距离的测量
分别选择了2 km遥控套装和3 km遥控套装进行测量,试验在武汉市黄陂区武湖武汉市农业科学技术研究院北部园区宽阔的道路上进行。天气条件:晴好天气、微风。试验结果显示3 km遥控套装的有效遥控距离约为150~200 m,符合本机要求。
3.3 尾部喷管流量和蠕动泵流量的测量
流量实测时采用计时称重的方法或称重(控制总容量)计时的方法。尾部喷管管径为15.6 mm,在没有进行转向操控,两侧电磁阀关闭的情况下,测得喷管的流量为 80 L/min、流速约 7 m/s;在进行蠕动泵流量测试时,喷水推进转向式遥控渔药喷施机的设计采用了自来水作为对象,测得可调蠕动泵流量范围约为 16~82 mL/min;在采用鱼药进行相关试验时,对黏稠性比较大的鱼药进行一定比例的预稀释(稀释比一般为1∶2~1∶6,视黏稠程度而定,比较黏稠的比例取大值,比如金碘试验时采用1∶6);经过试验,流量有所减少,但变化相对比较稳定,对同种药液,基本可以保证流量稳定。因此,可以视蠕动泵的最大流量约为80 mL/min,计算出经过蠕动泵将药液泵入管道的稀释比约为1∶1 000,调低蠕动泵到最低流量,则稀释比为1∶5 000。
3.4 船速和續航时间的测量
在喷水推进转向式遥控渔药喷施机的设计定型初步完成后,对正常行进速度进行了测量,测得船速约为1.0 m/s;试验通过在船尾系上细尼龙绳,正常操控保持直线行驶,计时测量绳长得到船速数值。在施药工作状态下,对锂电池充满电时进行试验,正常操控时可以持续工作约55 min。在进行续航试验时发现工作50~55 min时速度下降明显,试验至约55 min时,动力水泵停止工作。
4 小结
本研究研制的喷水推进转向式遥控渔药喷施机,根据渔药的喷施特性、鱼塘对渔药的要求和喷施特点,利用无线电遥控技术控制渔药喷施机的运行,通过自动药水混合进行喷施作业。喷施机的质量为26 kg,其平均行驶速度为1.0 m/s。该设备每小时最大喷施覆盖面积为2.4 hm2,喷施效率是人工的6倍。该喷施机采用无线电遥控技术,有效遥控距离可达200 m,发射功率较大,抗干扰和灵敏度强。该喷施机操作简单,可以根据鱼塘的面积进行渔药配制,科学施药,不会造成浪费和对环境的污染。该喷施机与传统施药方式相比较渔药喷洒效率大大提高,喷洒效率达到2.4 hm2/h,节省劳动力,有效解决了人工泼洒渔药工效较低且施药过程中渔药对施药人员身体的危害等问题,具有安全、高效、施药均匀、自动化程度高等优点。
参考文献:
[1] 胡 鲲,龚路旸,朱泽闻,等.我国渔药剂型使用现状及其在渔药安全使用技术中的价值[J].中国兽药杂志,2011,45(5):43-46.
[2] 胡 琪,叶 飞.渔药全池泼洒技术[J].农村养殖技术,2006(20):35.
[3] 孟祥宝,黄家怿,谢秋波,等.基于自动巡航无人驾驶船的水产养殖在线监控技术[J].农业机械学报,2015,46(3):276-281,260.
[4] 刘 海,张俊峰,曾凡琮,等.渔药自动喷施机的改进设计[J].湖北农业科学,2015,54(3):700-702.
[5] 曾凡琮,张俊峰,刘 海,等.基于CFD的渔药喷施机混药喷施装置流场分析研究[J].中国农机化学报,2015,36(3):132-135, 140.
[6] 杨琼方,王永生,李 翔.喷水推进泵通用特性曲线的计算流体动力学分析[J].清华大学学报(自然科学版),2010,50(8):1311-1315.
[7] 何培杰,吴春笃,陈翠英,等.新型喷雾混药装置性能研究[J].农业机械学报,2001,32(3):44-47.
[8] 邱白晶,贾方闻,邓 斌,等.混药质量浓度在线检测装置[J].农业机械学报,2014,45(2):99-104.
[9] 邱白晶,马 靖,邓 斌,等.在线混药喷雾系统混药性能试验[J].农业工程学报,2014,30(17):78-85.
[10] 董晓娅,杨亚飞,邱白晶,等.便携式混药浓度在线检测装置的设计[J].中国农机化学报,2014,35(6):94-98.
[11] 张俊峰,庞雄斌,刘 海,等.在线射流混药比例控制试验平台研究[J].湖北农业科学,2016,55(10):2645-2648.
[12] 曾凡琮,张俊峰,刘 海,等.湖北池塘渔药喷施设备现状分析与发展趋势研究[J].湖北农机化,2015(4):58-60.
[13] 卢泽民,杜 铮,廖 剑,等.动态施药模糊控制系统研究与模拟[J].湖北农机化,2013(6):52-55.
[14] 张俊峰,柳国昌,万 勇,等.渔药自动喷施机的设计[J].湖北农业科学,2013,52(19):4792-4794,4815.
猜你喜欢
当代水产(2021年11期)2022-01-15
当代水产(2021年9期)2021-12-02
当代水产(2020年2期)2020-03-17
当代水产(2019年8期)2019-10-12
当代水产(2019年9期)2019-10-08
当代水产(2019年5期)2019-07-25
农家科技下旬刊(2016年9期)2016-12-15
农家科技下旬刊(2016年9期)2016-12-15
科学与财富(2016年28期)2016-10-14
