手制动装调系统中运动控制系统的设计
2017-08-08 04:16黄细旺
汽车科技 2017年4期
关键词:运动控制
黄细旺


摘 要:为克服手制动拉索人工装调一致性差所导致的安全隐患及燃油消耗量偏高的问题,开发了手制动拉索自动装调系统。应用NI公司的Cseries Modules与Kollmorgen公司的伺服电机与驱动器,构造成一个硬件结构,采用“PC+运动控制卡”的模式,利用以太网串行通信方式实现PC与伺服电机设备之间的连接,位置控制模式实现对电机的实时控制,开发了基于LabVIEW的伺服电机运动控制系统。结合手制动装调系统实验验证了该运动控制系统的可行性和合理性。
关键词:装调; LabVIEW;运动控制
中图分类号:U260.358 文献标识码:A 文章编号:1005-2550(2017)04-0078-05
Abstract: To overcome the potential safety hazard which is caused by the poor consistent regulating hand breaking cable, and avoid causing high fuel consumption, hand brake automatically install the system was developed..Application of NI company' C series Modules and kollemorgen' Servo motor and drive to Constructed as a hardware structure, Adopt the pattern of "PC + motion control card", using Ethernet serial communication mode to realize the connection between the PC and the servo motor equipment, to realize the real-time control of the motor position control mode, the design of the servo motor movement control system is realized. Combining with the experiment of hand braking system verified the feasibility and rationality of the motion control system.
Key Words: adjusting system; LabVIEW; motion control
手制动系统(又称驻车制动系统)是在汽车停驻时,用于稳定车辆,防止汽车滑行的制动装置[1]。车辆制动系统的可靠性是评价汽车性能的主要指标,其使用性能直接影响着汽车驻车制动时的安全性。手制动装置是汽车重要的装配组件,装配质量不高也是制动系阻滞力的主要来源,直接影响汽车的动力性与燃油经济性。因此整车装配过程中装配质量的好坏十分重要。然而,现阶段大多数汽车总装线上手制动系统的装配与调整采用的是人工操作方式,这种方式不仅操作繁琐,降低生产效率,而且装调的质量不稳定,受人为因素影响较大。因此,新型手制动装调系统的开发,对汽车性能的保证起到举足轻重的作用。
近年来,虚拟仪器以其独特的优势得到了非常广泛的应用,LabVIEW作为虚拟仪器语言之一,主要用于数据采集及控制、数据分析和数据显示,支持数据采集卡和运动控制卡等仪器,具有实时性[2]。伺服电机运动控制系统是手制动装调系统的主要部分,本文应用LabVIEW软件开发和设计运动控制系统。
1 手制动装调系统概述
1.1 手制动装调系统的组成
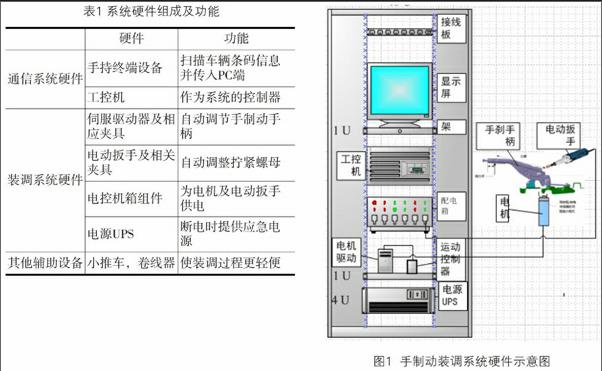
根据某车企提出的“手制动装调系统开发技术要求”,以及考虑到该系统的使用环境,最终确定了由伺服电机调节手制动手柄,电动扳手调整螺母的方案。因此系统硬件构成主要有工控机、伺服驱动器(包括无刷伺服电机、电机驱动器、运动控制器)、电动扳手、电控机箱組件、各种相关夹具,手持终端设备及其他辅助设备,其各自性能见下表1:
1.2 手制动装调系统的原理及流程
手制动装调系统的示意图如图1所示,其工作原理是:利用LabVIEW程序对伺服电机的实时控制,操纵制动手柄,将制动手柄调到一定的位置后,安装在手柄上电动扳手拧紧调整螺母,伺服驱动器再次调整手柄后,反馈某一特定位置时的手柄力矩,根据这一力矩判断调整的拉索预紧力是否合格。
该系统的具体工作流程是:
(1)开启手制动装调测试系统,读取汽车车型条码,将由伺服电机驱动的制动手柄操纵装置安装到手制动手柄后臂上,电动扳手安装在拉索调整螺母上,棘爪释放套装到手制动手柄顶部;
(2)按下启动按钮(Start)开始运行工作循环,设备归零。制动手柄操纵装置驱动手制动手柄拉到设定齿位,电动扳手按设定的拧紧力矩预拧紧调整螺母;
(3)制动手柄操纵装置驱动手制动手柄拉到设定的最大角度,往复3次,然后将手制动手柄回到零位;
(4)制动手柄操纵装置驱动手制动手柄拉到设定的拉索调整位置;电动扳手再次按设定的拧紧力矩自动拧紧调整螺母;
(5)再将手柄拉到某指定角度下通过伺服电机反馈此位置的力矩,经过程序完成指定角度下拉力值的检测,并将最终信息储存在工控机的数据库中,最后电机完成复位,装调工序结束。
2 电机运动控制系统的设计
运动控制是对物体位置和速度进行精确控制的技术[3]。文章着重研究在NI Compact RIO硬件环境上执行高精度运动控制的复杂运动。
2.1 运动控制系统的硬件选型
文章采用“PC+运动控制卡”模式对电机运动控制系统进行设计。采用这种模式的运动控制系统根据伺服驱动器这一被控制对象的控制要求,在LabVIEW软件环境中设计符合要求的程序,进行精确控制。该系统硬件由PC上位机机,运动控制卡、伺服电机、电机驱动器以及执行机构等部分构成,PC机和运动控制卡通过PCI总线进行通信。其系统结构与原理示意如图2所示:
2.1.1 控制部分
运动控制器是运动控制系统的主要部分。本系統的运动控制部件选用的是NI公司的NI C series Modules中cRIO-9068运动控制器。9068能够较好的与后面所选用的伺服电机和驱动器配合。NI cRIO-9068配置双核处理器、8个C系列I/O模块的插槽,满足系统中安装多个开关和指示灯的需求。同时,该控制器配备的Artix-7 FPGA的667 MHz双核ARM Cortex-A9处理器,已经广泛应用于嵌入式检测和控制。其嵌入式操作的256 MB DDR3内存能够非易失性存储大量数据信息,还有千兆以太网、USB设备、USB主机和串行端口,提供多种通讯的方式。
2.1.2 驱动部分
驱动部分包括电机和电机驱动器两部分。本系统的电机采用的是无刷伺服电机,伺服电机的运行需要一个电子装置驱动,即电机驱动器。在手制动装调系统中选用的电机型号为Kollmorgen AKM43H,相配套的电机驱动器是AKD-P00606。AKM43H电机可输出的转矩为4.82Nm,
T=Tmoter×i
i=25为减速比,Tmoter为电机输峰值转矩可计算出输出轴输出转矩为180 N·m,而目前说有乘用车手刹拉到最大位置的转矩最大为90 N·m,上述电机满足要求。
2.2 运动控制系统的软件设计
在运动控制系统中使用LabVIEW开发平台,能极大地简化编程,缩短开发时间。
2.2.1 前面板
运动控制系统的前面板界面如图3所示:
2.2.2 控制程序
控制制动手柄操纵装置的方式有三种,分别是转矩控制、位置控制和速度控制。本系统没有应用速度控制方式,转矩控制方式是通过外部设定模拟量或固定地址来对外输出转矩的大小,当实际转矩大于这一值时,电机停止运转;位置控制模式一般是通过设定输入脉冲的频率来控制转动速度,设定脉冲个数控制转角[4]。
手制动装调过程中,要频繁控制制动手柄操纵装置往复运动,控制程序采用LabVIEW层叠式顺序结构,部分程序见图4:
为避免上一次装调带来的影响,在系统每一次运行时,电机首先复位然后再进行下一步操作,应用转矩控制模式可以实现电机复位,程序图如下图6所示:
2.2.3 系统通信
在对系统进行程序设计时要建立各设备之间的良好通讯,并对各单元模块进行配置,使用标准以太网(直线)跳接线,直接将AKD电机驱动器连接到运动控制器,再用以太网跳接线将运动控制器与PC端相连,使得各设备之间能够很好地进行信息交换和数据传递。
2.2.4 系统的存储
手制动装调系统的数据库程序是采用开源的数据库访问工具LabSQL编写。将最终反馈的VIN,力矩等数据信息进行存储的程序结构见下图7:
3 实验验证
结合装调系统,在实验室中搭建电机运动控制系统,进行验证性实验,实物连接图见下图8:
试验时,实验人员首先通过上位机设置电机参数启动伺服电机,实现伺服电机的平稳运行。伺服电机运行的过程中随机的发送速度指令和正反转指令,观察电机的实时性及运行稳定性。同时将储存在LabVIEW数据库中的转矩数据导出,采用波形图表的形式直观的展示,波形图如图9所示。根据数据库中的而数据取出1000组数据计算出其标准差为:
将n=1000,X0=15N·m,代入上式计算出标准差为S=0.532。而该系统所允许的波动范围是(-2,2),波动范围内的标准差为S0=1.141,而0.532<1.414,该误差在允许的范围内。可以分析出装调的质量很稳定,间接的验证了电机运动控制的可行性和合理性。
4 结论
(1)经试验验证,电机运动控制系统运用到装调系统中,能克服人工调整手刹拉索后装调结果一致性和重复性差的缺陷,具有较高的装调质量和效率。间接的验证了电机运动控制系统的稳定性和可行性。
(2)该运动控制系统可以通过电机反馈实时力矩,具有稳定性和可行性,能够满足现有系统的需求,但是也仍有局限,即只能反馈电机的静态实时力矩。后续需要在电机输出轴上安装一个力矩传感器,直接测量包括动态实时力矩在内各种状态下的实时力矩。进一步提高该系统的精确性。
参考文献:
[1]陈家瑞.汽车构造[M].人民交通出版社,2006.
[2]李艳苹.基于LabVIEW的运动控制系统的设计[J].中国科技信息,2009(22):95-96.
[3]李晨.运动控制系统简介[J].中国装备网,2015:33-35+39.
[4]李生军.能量回馈型异步电机加载测试系统的研究[D].大连交通大学,2013.
[5]高瑞,苗长云,王中伟.基于LabVIEW的多轴运动控制系统的设计与开发[J].天津工业大学学报,2008, 27(6).
猜你喜欢
数字技术与应用(2016年10期)2017-04-01
价值工程(2017年8期)2017-03-25
计算机时代(2016年11期)2016-12-19
电脑知识与技术(2016年27期)2016-12-15
企业导报(2015年15期)2016-01-18
现代电子技术(2014年17期)2014-09-17
现代电子技术(2014年10期)2014-07-19