
基于单片机的小车方向控制的研究与设计
2017-08-02 09:10湖南信息职业技术学院电子工程学院黄亚辉
电子世界 2017年14期
湖南信息职业技术学院电子工程学院 黄亚辉
基于单片机的小车方向控制的研究与设计
湖南信息职业技术学院电子工程学院 黄亚辉
设计采用单片机作为自动往返小车的控制核心,控制小车的启停、速度、位置等,在设计过程中可采用光电传感器检测标志线,超声波传感器可检测小车的位置,开关式霍尔传感器可检测车的速度和距离。本次设计的简易智能电动车,采用AT89C52单片机作为小车的检测和控制核心;采用红外线接收对管来检测路上感应到的黑色轨道线,从而把反馈到的信号送单片机,使单片机按照预定的工作模式可控制小车预先设计好的路线或轨道行驶。
单片机;小车;方向控制;设计
一、设计方案
根据本设计的要求,确定如下方案:以AT89C52单片机为核心的控制电路,采用模块化的设计方案,运用光电传感器、金属探测传感器、超声波传感器组成不同的检测电路,实现小车在行驶中自动寻迹、躲避障碍物、测量里程等问题[2]。并将测量数据传送至单片机进行处理,单片机根据检测的数据实现对小车的智能控制。要求小车在自动行驶过程中能够及时、灵活地避开障碍物.具体要求如下[3]:如果小车前方无障碍物,小车直走;如果仅在小车右前方有障碍物,小车向左拐弯;如果仅在小车左前方有障碍物,小车向右拐弯;如果小车直前方有障碍物,小车后退并右转。
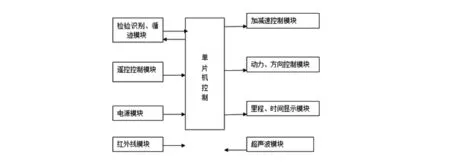
图1 总体框图
我们需要擅长处理多开关量的标准单片机,而不能用精简I/O口和程序存储器的小体积单片机,我们选定了89C52单片机作为本设计的主控装置,52系列单片机具有功能强大的位操作指令,I/O口均可按位寻址,程序空间多达4K对于本设计也绰绰有余。
二、控制系统的设计
针对要求,这台小车的车体选用现成的市售玩具车改装而成,采用霍尔传感器,使用时只需要在车轮上安装小的磁铁[4]。小车行驶过程中,霍尔传感器通过粘贴在车轮上的磁块对转动圈数进行检测,每转动一周产生一个低脉冲,通过单片机计数可得到脉冲个数,这样可得小车转动圈数即得到转速,再根据车轮周长可计算出小车前进或后退的距离。采用超声波传感器,超声波传感器可以给单片机提供精确的位置信号。单片机根据发射和接收到的超声波的时间差来判断小车离挡板的距离,根据这个距离再发出转向调整控制,实现小车的正常运行。为完成设计要求,我们使用了很多传感器包括“红外传感器”“红外对管”使这台小车有了“视觉”和“触觉”,我们还为这台小车安装了“大脑”——“单片机控制系统”通过以上努力,基本可以使这台小车可以按我们设定的路线运行[5]。
(1)晶振电路。单片机要工作必须有一个外部的时钟源,这个时钟源由外部晶振产生,具体电路见的CY1、C8、C9,在电路板晶振和电容要靠近18脚和19脚放置。(2)复位电路。S12的复位是由外部的复位电路来实现的。复位引脚RST通过一个斯密特触发器用来抑制噪声,在每个机器周期的S5P2,斯密特触发器的输出电平由复位电路采样一次,然后才能得到内部复位操作所需要的信号[6]。

图2 控制系统设计图
检测障碍物的距离可以根据要求通过尾部的电位器旋钮进行调节。能正确的按照遥控指令进行启动、左转、右转、停止;在进行寻迹调试时发现在驶出轨道左面时能快速灵敏的驶回原轨道,但在驶出右面时有时不能驶回原轨道,反应不是很灵敏,后来发现右面的红外对管的反射距离没有左面的反射距离大,最后我们决定采用垫高右面的轨道来达到右面红外对管的反射距离,经过这一处理基本可以达到寻迹的要求了。
三、部分软件设计
先应用C52单片机产生能够控制直流电机旋转方向等各种控制信号,后利用这些控制信号去实现对直流电机的旋转方向等的控制;因此本模块所设计的控制函数可以用作功能模块被后续模块直接调用。在进行微机控制系统设计时,除了系统硬件设计外,软件设计在微机控制系统设计中占重要地位。对于本系统,软件尤为重要。为了完成任务,在进行软件设计时采用程序设计方法叫模块程序设计法。模块程序设计法的主要优点是:第一,单个模块比起一个完整的程序易于编写及调试;第二,模块可以共存,一个模块可以被多个任务在不同条件下调用;第三,模块程序允许设计者分割任务和利用已有程序,为设计者提供方便。
基础层实现:电源模块可选择将市电转换成直流+5V电源给整个系统供电,显示器件选用LCDl602、四位一体数码管或点阵。控制器要求使用按键控制,直流电机驱动模块可选择三极管构成的H桥驱动电路,利用按键控制单片机发送PWM波,控制电机的运行模式。
提高层实现:在基础层实现基础上,控制器可以选用红外遥控解码或者蓝牙串口控制,利用控制器控制单片机发出不同的PWM波,控制电机的多种运行模式。
研究层实现:在提高层实现基础上,加入红外传感器自动寻迹功能、超声波传感器自动避障功能或自行设计其他功能(见图3)。
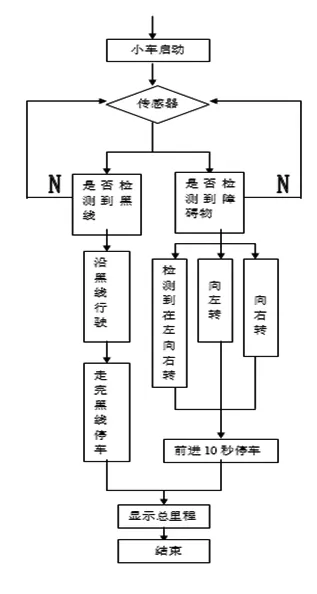
图3 软件设计流程图
四、结论
本系统用一片小型单片机完全能实现预定功能,几乎没有复杂的外围电路器件,结构简单可靠,硬件、软件代价都较低,系统成本预算较低。
[1]程丛丛,田为民. 基于单片机的智能循迹小车[J].山东工业技术,2017,21(07):2.
[2]朱婷,叶俊.教育机器人小车循迹部分的设计与改进[J].电子技术与软件工程,2017,17(05):260-261.
[3]卜文东,华凯,马草原,白耀武,孙荣琛.基于红外传感器智能小车的设计[J].电子世界,2017,14(03):134-136.
[4]田蔚.基于单片机控制的智能送料小车的硬件电路设计[J].企业技术开发,2016,19(13):42-44.
[5]索南尖措,杨建,周欢欢,杨倩.基于STC89C52单片机的智能小车的设计[J].信息安全与技术,2016,22(04):67-69.
[6]王勇申,初俊博,孙恒震,郝政,韩特,刘峥.智能小车的设计与应用[J].科技传播,2016,21(07):170-171.
黄亚辉(1990—),男,湖南益阳人,大学本科,助教,研究方向:智能控制与机器人应用技术。
猜你喜欢
环球时报(2022-05-23)2022-05-23
金桥(2021年4期)2021-05-21
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
电子制作(2019年7期)2019-04-25
文苑(2018年22期)2018-11-19
电子制作(2018年8期)2018-06-26
光学精密工程(2016年3期)2016-11-07
