太阳能无人机能源控制器研究与设计
2017-07-31 18:47陆运章程文进张建国杨晓生张佳亮
电子工业专用设备 2017年3期
陆运章,郭 进,程文进,周 蒙,张建国,杨晓生,张佳亮
(中国电子科技集团公司第四十八研究所,湖南 长沙 410111)
太阳能无人机能源控制器研究与设计
陆运章,郭 进,程文进,周 蒙,张建国,杨晓生,张佳亮
(中国电子科技集团公司第四十八研究所,湖南 长沙 410111)
对太阳能无人机能源控制器的设计进行了详细的阐述,对能源系统在地面情况下发电与带载运行情况进行了实验验证。该方案设计选用最大功率点跟踪 (Maximum Power Point Tracking,MPPT)技术,实现了对太阳能无人机能源系统中光伏阵列、储能电池自动充放电管理功能。该方案设计电路简单、系统转换效率高、适应性强,可作为临近空间飞行器电源系统的理想选择之一。
太阳能无人机;能源控制器;最大功率点跟踪
太阳能无人机利用太阳能提供能源,锂离子电池、锂硫电池等二次电池存储电能,多组电机螺旋桨进行推进,可以实现无人机的长航时高空飞行[1]。在军事侦察、高空通信中继、环境监测、林区管理、科学研究等领域具有广阔的应用前景,是高空长航时无人机的一个重要发展方向之一[2]。其中能源管理系统作为太阳能无人机能源系统的控制调节中心,主要功能是实现太阳电池阵输出功率控制,以及对电源系统中的储能电池组进行充放电管理,为无人机电机螺旋桨及飞控、传感器等航电设备提供可靠、充足的能量[3]。
由于太阳能无人机的光伏阵列铺装面积有限,收集太阳能量受限,因此提高太阳能整体发电能力与利用效率是未来的重点研究方向之一[4]。目前对于太阳能无人机光伏阵列的能量输出方式,通常能源管理系统采用恒压输出方式来对储能电池进行充电[5],其能量利用效率低,为提高能量利用效率,设计高效的能源管理系统势在必行。本文介绍了一种电路设计简单、系统转换效率高的太阳能无人机能源控制器,可供未来的临近空间飞行器电源系统选择。
1 能源系统介绍
如图1所示,太阳能无人机能源系统主要包括无人机光伏阵列、能源控制器、储能电池组和负载设备。太阳能无人机能源系统采用分布式发电、高压传输、集中配电、就近转换的电源配电及管理设计思想。无人机光伏阵列采用分布式发电模式,机翼同一受光曲面的光伏阵列构成一个发电单元,尽量减少由于机翼曲面导致的光强不均对系统整体发电功率影响;大功率、长距离传输电能采用高压直流母线传输,尽量减少传输损耗;DC-DC转换电路及控制电路尽量布置在负载设备附近,就近转换供电。能源供给系统为提高能源系统输出效率,采用分布式MPPT模式为储能电池充电和负载供电。每个MPPT模块负责机翼表面同一受光曲面的光伏阵列,使用多个MPPT模块构成分布式MPPT能源控制器。

图1 无人机能源系统示意图
2 设计思路
2.1 能源系统配置
通常无人机直流电机额定电压为直流48 V,为匹配电机电压,能源管理系统提供一条46~ 60 V的直流母线,通过直流母线DC-DC降压实现机载其他设备电源电压。如图2所示,能源管理系统采用分布式MPPT模式和直流母线体制,分别由不同的MPPT模块实现对机翼同一受光曲面的光伏阵列功率进行最大跟踪输出,储能电池组并联在母线上,而机载设备电源控制部分通过直流母线变换电压获得。当太阳电池阵输出功率充足时,发电电能通过直流母线给负载供电,余电存储在储能电池中;当太阳电池阵输出功率不足时,通过储能电池组放电控制对负载进行联合供电。

图2 能源管理系统电路连接示意图
2.2 MPPT控制电路设计
能源控制器的作用是实现太阳电池阵最大功率点跟踪、蓄电池的自适应放电、负载电压变化跟随。如图3所示,其关键步骤是通过一个最大功率点跟踪芯片,驱动一个DC-DC变换电路,使能源管理器在输入端实时跟踪太阳电池组件的最大功率点,保证光伏阵列峰值功率输出,输出端自动适应负载电压变化,母线电压跟随储能电池变化,这样可大大简化系统结构,同时又能保证太阳电池阵最大功率输出。

图3 MPPT控制电路原理图
MPPT芯片包括输出电流、输入电流、输入电压和输出电压4种不同的调节形式。当由一块光伏组件供电时,MPPT功能先通过“扰乱观察法”来搜索光伏组件的最大功率点,采用输入电压调节以定位和跟踪电池组件的最大功率点。输入电流调节用于限制从输入电源吸收的最大电流;输出电流调节负责限制储能电池的充电电流,而输出电压调节则用于设定最大储能电池的充电电压,实现过充保护。
MPPT能源管理模块在搜索光伏组件最大功率输出过程中,既可以工作于降压模式,也可以工作于升压模式,这主要通过DC-DC实现,其工作原理简图如图4所示。
2.3 数据采集电路设计
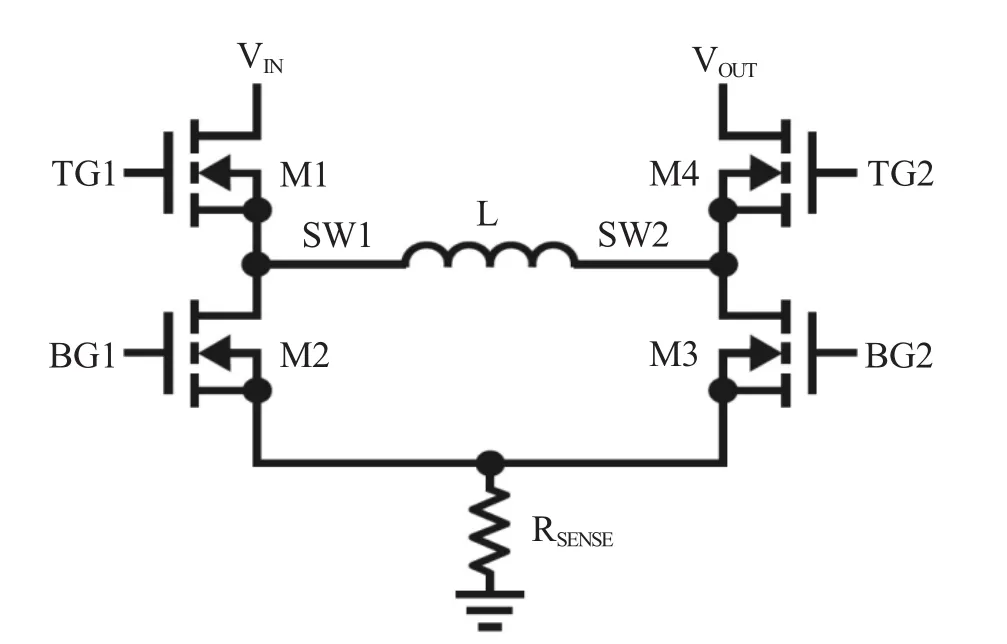
图4 简化的DC-DC电路工作原理图
能源控制器的整体设计要求采集每路MPPT模块的输入电压、输出电压、输入电流、输出电流、储能电池电压、储能电池充/放电电流、储能电池组内部温度、控制器腔内温度、光伏组件表面温度等参数,以便能源控制器工作时,可以监控其工作状态,并评估不同工况下的工作效率。数据采集电路实现对上述数据的采集,并发送给飞控。数据采集电路由电源供电电路、单片机及复位电路、数据通讯电路、模拟量输入低通滤波电路、调节电路组成。
采集电路在采集MPPT的输入、输出电流及负载工作电流时均采取霍尔电流传感器方式,在采集输入与输出电压时采取电压互感器方式,使得采集电路与MPPT模块电路隔离,不仅解决了MPPT模块串联使用时各物理量悬浮地的问题,同时提高了采集的各参数准确度。数据采集电路带RS422通讯接口,可将储能电池组BMS电路板的SOC信息传输给数据采集电路单片机,实现储能电池数据的实时监测,同时也将采集到的数据发送给飞控,实现飞控对整个能源管理系统参数的实时监测。
2.4 DC-DC电路设计
无人机的DC-DC电路部分使用市面上成熟的直流-直流变换器(DC-DC电源模块),机载设备电源控制部分通过母线降压变换获得,完成对电压为24 V的飞控等负载与电压为12 V的数传、摄像等负载的转换,DC-DC电路原理如图5所示。

图5 DC-DC电路原理图
3 实验及结果分析
如图6所示,能源管理系统的电性能测试由无人机光伏阵列、能源控制器、储能电池组、DC-DC和阻性负载构成,数据采集端接入工控机作为上位机。
在晴天太阳辐照度较好的时候,将光伏组件装机功率为1.2 kW的无人机机翼平铺在地面,无人机机翼上的光伏阵列按6个不同受光面划分为6个光伏组件,分别与6路MPPT模块连接;采用48 V的蓄电池作为储能电池组;两个DC-DC分别将母线电压降至24 V与12 V,3个阻性负载分别模拟电机、传感器和飞控等700 W的设备负载。能源控制器数据采集模块以1 Hz的采样频率采集各个参数,并通过RS422总线在测试过程中上传测量参数至上位机。
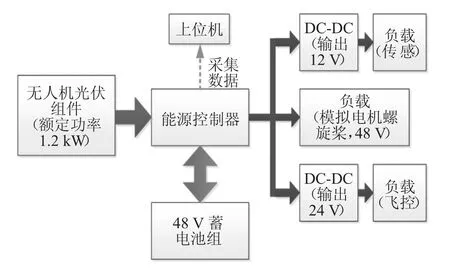
图6 无人机能源系统测试接线图
实时监测的能源系统发电情况如图7所示,测试时间从中午11:30开始持续至下午16:40,机翼光伏组件工作正常,从11:30至14:40(间隔大于3 h),经过MPPT模块转换后的输出功率平均值大于600 W,最大值为721 W(出现在12:09:02,此时对应的太阳辐照度为700 W/cm2),表明能源控制器的输出功率正常,在中午至少有3 h可完全通过无人机光伏阵列输出电能来满足600 W负载的正常工作。下午随着太阳光的减弱,输出功率逐渐降低。
对应的能源控制器MPPT模块输出电压与输出电流曲线如图8所示,由于MPPT模块的输出电压被蓄电池组电压钳位,而光伏阵列的发电功率与负载耗电功率接近,因此在11:30到15:10期间的输出电压基本维持在48 V。从15:10开始将所有负载断开,MPPT模块只对蓄电池组充电,由于蓄电池组流入的电流从基本为0迅速增大到10 A以上,因而蓄电池组输入端的电压也迅速上升至52 V并逐渐稳定,表明能源控制器的MPPT模块对蓄电池的充电功能正常,负载切换不影响系统运行。
能源控制器MPPT模块的转换效率测试的部分数据如表1所示。从表1可知,所选的每10 min一组数据计算得到MPPT转换效率均大于97%,可见该系统具有良好的转换效率,在能源控制器所测时间点的输出功率大于650 W的情况下,其发热功率均小于20 W。

图7 输出功率随时间的变化曲线

图8 输出电压和输出电流随时间的变化曲线

表1 能源控制器MPPT转换效率测试
4 结束语
本文对太阳能无人机能源控制器的设计进行了详细阐述,对太阳能无人机的能源系统在地面情况下发电与带载运行情况进行了实验验证。该方案成功实现了对无人机能源系统中光伏阵列、储能电池充放电管理功能,MPPT转换效率在97%以上。该设备的研制可满足未来太阳能无人机等工程需求,在临近空间飞行器电源系统领域具有很好的应用前景。
[1] 邓海强,余雄庆.太阳能飞机的现状和发展趋势[J].航空科学技术,2006,(1):28-30.
[2] 高广林,李占科,宋笔锋,等.太阳能无人机关键技术分析[J].飞行力学,2010,28(1):1-4.
[3] 赵辉杰,马建超.小型太阳能无人机持久飞行技术研究[J].中国电子科学研究院学报,2013,8(4):384-387.
[4] 肖伟,周洲,王睿,等.分布式推进系统对太阳能无人机横航向飞行品质的影响研究[J].西北工业大学学报,2012,30(6):868-872.
[5] 昌敏,周洲,成柯,等.高空驻留太阳能飞机主动式光伏组件面功率特性研究[J].航空学报,2013,34(2):273-281.
Research and Design of Power Management Controller of Solar Unmanned Aerial Vehicle
LU Yunzhang,GUO Jin,ZHOU Meng,ZHANG Jianguo,YANG Xiaosheng,ZHANG Jialiang
(The 48thResearch Institute of CETE,Changsha 410111,China)
The power management controller of the solar unmanned aerial vehicle (UAV)was introduced,and the energy systemhad been tested onthe ground condition.Maximum Power Point Tracking(MPPT)was chosen for the solar UAV energymanagement system,and the design had the ability of automatic managing the solar cell array power generation,battery charging.The designed power management system with great adaptabilityand performance was useful in the application ofUAV.
Solar unmanned aerial vehicle;Power management controller;Maximum power point tracking(MPPT)
TM914.4
A
1004-4507(2017)03-0045-06
2017-04-17
陆运章,男,1984年生,博士,工程师,主要从事无人机、飞艇等能源系统研究与开发工作。
猜你喜欢
科学大众(2022年23期)2023-01-30
煤气与热力(2021年12期)2022-01-19
煤气与热力(2021年6期)2021-07-28
煤气与热力(2021年4期)2021-06-09
通信电源技术(2018年3期)2018-06-26
小哥白尼(趣味科学)(2018年4期)2018-06-21
能源(2017年12期)2018-01-31
少儿科学周刊·儿童版(2015年7期)2015-11-24
太阳能(2015年12期)2015-04-12
筑路机械与施工机械化(2014年4期)2014-03-01