稻麦精准变量施肥机排肥性能分析与试验
2017-07-31 20:54施印炎汪小旵ODHIAMBO章永年丁为民
农业机械学报 2017年7期
施印炎 陈 满 汪小旵,3 ODHIAMBO M O 章永年 丁为民,3
(1.南京农业大学工学院,南京210031;2.农业部南京农业机械化研究所,南京210014; 3.江苏省现代设施农业技术与装备工程实验室,南京210031)
稻麦精准变量施肥机排肥性能分析与试验
施印炎1陈 满2汪小旵1,3ODHIAMBO M O1章永年1丁为民1,3
(1.南京农业大学工学院,南京210031;2.农业部南京农业机械化研究所,南京210014; 3.江苏省现代设施农业技术与装备工程实验室,南京210031)
为提高基于近地光谱技术的稻麦精准变量施肥机排肥性能稳定性,改善变量施肥控制精度,建立了外槽轮式变量施肥机离散元仿真模型,运用离散单元法和EDEM 2.2软件对施肥机排肥过程进行性能分析和数值模拟,研究不同排肥器结构和施肥控制策略对施肥机排肥稳定性的影响,并通过台架试验和田间试验验证仿真模型的准确性。结果表明:改进后的排肥器施肥量变异性系数明显减小,标准差减小14.59 g,变异系数降低9.9%;采用转速优先控制策略,当槽轮开度为19.34mm时,排肥量稳定性系数最佳为1.09%;采用开度优先控制策略,当槽轮转速为55.75 r/min时,排肥量变异性系数最小为1.85%;与验证试验结果相比,误差最大为14.06%。结果验证了离散元仿真方法分析颗粒运动过程的准确性,表明所设计改进的排肥器能够提高施肥机排肥稳定性,满足稻麦精准变量施肥要求。
变量施肥;外槽轮;施肥稳定性;离散元分析
引言
变量施肥技术作为实施精准农业的核心内容,对实现现代农业可持续发展具有重大意义[1-2]。机械化施肥装备为实现变量施肥技术提供了可能,现有的变量施肥机排肥方式主要包括外离心式、槽轮式和螺旋式等[3],国内精准变量施肥机械主要以外槽轮式排肥器作为地表追肥作业的排肥装置。但外槽轮式排肥结构在低排量、低转速下的脉动性易产生间歇性排肥,直接影响精准变量施肥稳定性。
为保证稻麦精准变量施肥过程的排肥稳定性,国内外专家学者对槽轮式变量施肥机械做了大量的研究[4-8],主要集中在整机结构设计以及控制系统的生成方面。近年来,随着离散元数值计算方法在研究农业颗粒物料运动方面的成熟运用,越来越多的研究者应用离散元法分析离散物料与农机执行机构的交互作用[9-13]。胡永光等[14-15]利用 EDEM离散元仿真软件对茶园施肥机肥料颗粒的运动及分布进行模拟计算和参数优化,获得比较理想的茶园撒肥均匀性;苑进等[16-17]应用颗粒离散元法对多种肥料的掺混、排肥过程进行数值模拟,分析了变比变量施肥机的掺混性能和排肥滞后性,并对排肥装置的关键部件参数进行优化;邱白晶、李耀明团队等[18-20]采用Hertz-Mindlin接触力学模型模拟了水稻籽粒的碰撞力学过程,得到影响籽粒碰撞力变化的重要因素,并与试验结果进行对比。这些理论分析对进一步研究精准变量施肥机的整机性能具有关键作用。
本文针对本课题组设计的基于近地光谱技术的稻麦精准追肥机作业过程中存在的排肥槽轮排肥量脉动性大、落肥滞后时间长等实际问题[21-23],应用EDEM离散元分析软件建立稻麦精准变量施肥机排肥机构的仿真模型,分析肥料颗粒在外槽轮式排肥器中排肥过程,研究不同排肥器结构、施肥量调节方式对变量施肥机排肥稳定性的影响,并进行台架试验和田间试验验证,以改善稻麦精准变量施肥机的作业性能。
1 整机结构与工作原理
1.1 整机结构
稻麦精准变量施肥机整机结构如图1所示,主要包括传感器、车载CPU、施肥机构、控制系统以及行走机构等主要部件。
1.2 工作原理
轴分段式稻麦精准变量施肥机整机幅宽2 m,作业行数为8行、4行为1组,可独立调整转速和开度,各自负责1m的作业区。其工作原理如下:车载计算机接收到Greenseeker光谱传感器测量的稻麦冠层归一化植被指数(NDVI)后,通过变量施肥专家决策系统,基于改进的Ruan模型计算实时目标施肥量,再结合相应的传感器测得当前整机行走速度以及排肥槽轮转速和开度反馈给控制器(STM32单片机),形成整个系统的闭环控制,经过决策系统指导相应的控制电动机在线调整作物实时所需的施肥量,实现相对意义上的稻麦精准变量施肥。
2 排肥器结构与排肥特性分析
2.1 排肥器结构设计与改进
排肥器结构设计的合理性直接影响变量施肥的控制精度,结合前期变量施肥作业中槽轮排肥器出现的问题,对使用的典型外槽轮式排肥器结构进行研究,其结构如图2所示。

图2 典型排肥槽轮结构简图Fig.2 Structure diagram of typical outer groove-wheel
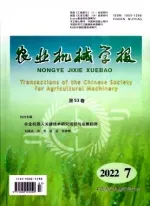
针对变量施肥机作业过程中排肥量脉动性大、排肥稳定性差的问题,为提高外槽轮排肥器的排肥性能,在对典型外槽轮式排肥器进行试验研究的基础上,对排肥器结构进行改进,其改进过程如图3所示。
图3a为传统的7槽式外槽轮排肥器,排肥槽有效工作长度为45.8mm,直径58mm,排肥主轴直径为17mm,排肥盒宽度为45.16 mm,排肥口直径为41mm。工作槽轮1与调节槽轮4相互分离(非整体),通过毛刷贴紧排肥槽轮拨肥,在高速施肥作业时,由于摩擦因数较大易产生高温变形,分离间隙变大,会出现肥料的泄漏,从而导致施肥量的波动较大,排肥不稳定;图3b将槽轮一体化加工,增加了阻塞套和排肥挡板,阻塞套内径为52mm,外径与排肥槽轮外径均为58 mm,挡肥板宽度与排肥盒宽度相等,为45.16mm;图3c用排肥舌代替了原有的塑料毛刷,宽度为45mm,避免了排肥过程中肥料颗粒的泄漏,依靠弹簧张力,保证了排肥腔的可靠填充和顺利拨肥,意在提高排肥器的排肥性能。
图3 外槽轮排肥器结构对比Fig.3 Structure comparisons of outer groove-wheel
2.2 排肥特性分析
为实现对轴分段式变量施肥机精确控制,对施肥机的工作机理进行准确分析,建立双变量施肥机的排肥模型。外槽轮式排肥器排肥量调节主要包括排肥器有效工作长度(槽轮开度)和排肥槽轮转速。对相应的排肥量模型进行分析:
根据农业机械设计基础知识分析,通过外槽轮排肥器排肥理论推导公式计算单位面积施肥单元目标施肥量,计算公式为

式中 Q——单位面积目标施肥量,kg/hm2
q——单个排肥器单位时间排肥量,kg/min
B——施肥幅宽,m
v——整机行走速度,km/h
N——排肥器个数
kv——整机前进打滑率
文献[21]提到,在不考虑排肥轴转速变化、整机振动等外界因素影响导致的排肥量非线性跳动情况下,单个排肥器的排肥量与主轴转速存在关系

式中 n——排肥主轴转速,r/min
k——标定拟合直线斜率
b——标定拟合直线截距
综合上文的分析,可以通过直流电动机控制主轴转速、步进电动机控制槽轮开度,结合相应的标定试验,将排肥量数值准确量化计算,实现相对意义上的稻麦精准变量施肥。
3 变量施肥机离散元模型建立与仿真试验设计
3.1 离散元仿真基本理论
颗粒离散单元法(Discrete element method,DEM)是用于模拟颗粒系统仿真分析的一种物体系统动力学数值计算方法,将互相接触在一起的实体单元视为离散颗粒群,考虑颗粒的形状、属性、粒径分布等因素,根据牛顿第二定律求解每个颗粒的受力、位置和速度等变化,通过建立颗粒系统的参数化模型,进行颗粒行为模拟与分析[24]。其基本原理主要有颗粒接触模型和牛顿第二定律。
根据力-位移关系,可以由位移得到颗粒受到的作用力,在这个过程中要用到的位移则可以根据牛顿第二定律计算得出。颗粒i的运动方程为

mi、Ii——颗粒i的质量和转动惯量

常用中心差分法对式(3)进行数值积分,得到颗粒新的位移,代入力-位移关系计算新的作用力,如此反复循环,实现跟踪每个颗粒在任意时刻的运动。
3.2 仿真模型的建立与物料特性参数的选择
根据EDEM离散元仿真分析的一般计算方法,在参数化建模软件Pro/E中建立外槽轮排肥器的三维实体模型,按照必要的虚拟约束和驱动进行装配,以.igs格式导入EDEM求解环境中,装配组件如图4所示。
以南方地区常用的颗粒复合肥为研究对象,参照文献[14-17]的试验方法,为简化计算过程,等效其为球型颗粒,随机采样对复合肥颗粒的物理特性参数进行测定,槽轮、机体、地面相关属性参数如表1所示。采用EDEM软件默认的Hertz-Mindlin无滑动接触模型进行肥料颗粒的仿真分析,设定颗粒工厂颗粒总数为100 000,外槽轮式排肥器运动为转动与直线移动(机具行进运动)的合成运动,参数设置贴近实际田间运动,增强模拟仿真过程的准确性。

图4 排肥器装配仿真图Fig.4 Assembly and simulation drawings of fertilizer apparatus

表1 物料特性参数Tab.1 Material properties of particles
3.3 排肥过程仿真试验设计
对所设计和改进的3种槽轮式排肥器(图3)分别导入EDEM软件中进行排肥作业仿真。每组试验重复5次,通过收集虚拟地面样本排肥量的质量取平均值,计算各排肥器排肥量稳定性变异系数。
通过改变槽轮开度和转速对排肥量进行双变量控制。转速优先控制策略是在每个转速下改变排肥器不同开度,计算施肥机排肥量的变异性,确定最佳开度,保持此开度不变,通过调节转速来实现变量施肥;开度优先控制策略则相反。对所选用的槽轮式排肥器分别进行转速优先控制、开度优先控制调节,同样收集虚拟地面排肥质量,计算各控制策略下施肥机排肥量稳定性变异系数。
排肥量稳定性变异系数作为评价变量施肥机械性能的重要指标之一,计算公式为

式中 Cv——变异系数 σ——标准差,g
N——样本数量
4 仿真结果与分析
4.1 排肥器结构仿真分析
根据上文的试验方案,在保持各个槽轮开度、转速一致的情况下,对不同结构形式的槽轮排肥器排肥过程进行仿真分析,其排肥量标准差和变异系数统计结果如图5所示。

图5 不同外槽轮排肥器排肥量仿真分析结果Fig.5 Analysis results of fertilizer amount in different structures
由图5可以看出,相比于常用的外槽轮式排肥器a,改进后的排肥器b、c的排肥性能有了明显提高。外槽轮a的排肥量标准差最大值为29.39 g,最小值为18.09 g,平均值为23.88 g;相应的变异系数的最大值为18.39%,最小值为8.57%,平均值为12.49%。而外槽轮 b排肥量的标准差较小,其均值为11.47 g;排肥量变异性小,变异系数平均值为3.39%;外槽轮 c的排肥量标准差最小,均值为9.29 g;排肥量变异性也最小,变异系数平均值为2.53%。外槽轮b比外槽轮a排肥量标准差均值降低了51.97%,变异系数均值降低了72.86%;而外槽轮 c比外槽轮 a排肥量标准差均值降低了61.1%,变异系数均值降低了79.74%。由此可见,改进后的外槽轮c的排肥性能最佳,其排肥量稳定性变异系数最大,为3.01%,很好地提高了变量施肥机排肥稳定性。
4.2 控制策略仿真分析
4.2.1 转速优先控制仿真分析
变量施肥机在不同槽轮开度下排肥量变异系数统计分析结果如图6所示。通过改变排肥器不同槽轮开度,施肥机排肥量变异系数最大值为15.25%,变异系数均值的最大值为 7.08%,最小值为0.97%,变异系数的方差最大值为2.32%2。由图6可以看出,当排肥器开度为45.16mm时,施肥机排肥量变异系数最大值、均值和方差都出现最小值,分别为1.94%、0.97%和0.31%2。综合考虑实际外槽轮式排肥器调节机构,为避免槽轮开度调节过大出现卡死或者断槽现象,故选择槽轮开度为19.34 mm,排肥量变异系数最大值、均值和方差仅大于槽轮开度为45.16mm时,分别为1.98%、1.09%和0.38%2。所以在转速优先控制策略时,为提高变量施肥机相对最优的排肥稳定性,槽轮开度应保持19.34mm不变。

图6 不同开度施肥机施肥量变异系数仿真曲线Fig.6 Variation coefficient simulation curves of fertilization under different openings
4.2.2 开度优先控制仿真分析
变量施肥机在不同槽轮转速下排肥量变异系数统计分析结果如图7所示。通过改变排肥器不同的槽轮转速,施肥机排肥量变异系数最大值为10.49%,变异系数均值的最大值为3.81%,最小值为1.84%,变异系数的方差最大值为4.17%2。由图7可以看出,施肥机开度优先控制策略时排肥量变异系数普遍大于速度优先控制策略,但是排肥性能稳定性高,变异系数方差波动小。当排肥槽轮转速为55.75 r/min时,施肥机排肥量变异系数最大值、均值和方差都出现最小值,分别为 6.25%、1.85%和1.42%2。所以,变量施肥机在此槽轮转速具有相对最优的排肥稳定性,因而在开度优先控制策略时,槽轮转速应保持55.75 r/min不变。
稻麦精准变量施肥机在控制系统获得作物冠层NDVI值后,通过施肥专家决策系统计算目标施肥量,结合行进速度,实时推算排肥器的目标转速和开度,实现精准变量施肥。

图7 不同转速施肥机施肥量变异系数仿真曲线Fig.7 Variation coefficient simulation curves of fertilization at different rotating speeds
5 台架试验与田间试验
为验证稻麦精准变量施肥机排肥器离散元仿真试验的准确性,分别于2016年3月6日在南京农业大学工学院农机实验室进行台架试验,2016年3月15日在江苏省金坛南京农业大学合作基地祥华家庭农场进行田间试验,作业现场如图8所示。试验地势平坦,试验地面积5 000m2,以当地惯用的复合颗粒肥为试验对象,测试方法及指标参照 GB/T 5262—2008《农业机械试验条件测定方法的一般规定》和相关施肥机械试验方法制定标准进行,通过改变不同的作业参数,对接肥桶里的复合肥质量进行称量统计分析,每组试验重复3次,计算施肥机排肥量稳定性变异系数。

图8 验证试验现场图Fig.8 Working pictures of validation test

图9 不同外槽轮排肥器排肥量台架试验结果Fig.9 Test result of fertilizer amount in different structures
实验室台架试验过程中,在同一根排肥主轴上安装3种不同结构形式的外槽轮排肥器,重复测量接肥桶的排肥量,变异系数统计结果如图9所示,外槽轮 a的排肥量稳定性变异系数的最大值为22.58%,平均值为16.80%。而外槽轮b的排肥量的变异系数相比于外槽轮a降低了10.87个百分点,外槽轮c的排肥变异性最小,相比于外槽轮a降低了13.12个百分点,同样说明了改进后的外槽轮c的排肥性能最好,提高了变量施肥机排肥稳定性。相比于图5分析结果,台架试验的整体排肥稳定性有所降低。
针对上述现象,对实验室台架试验、田间验证试验结果统计分析,与离散元虚拟仿真结果进行对比3组试验,每组试验5次,取平均值,对比结果如表2所示。
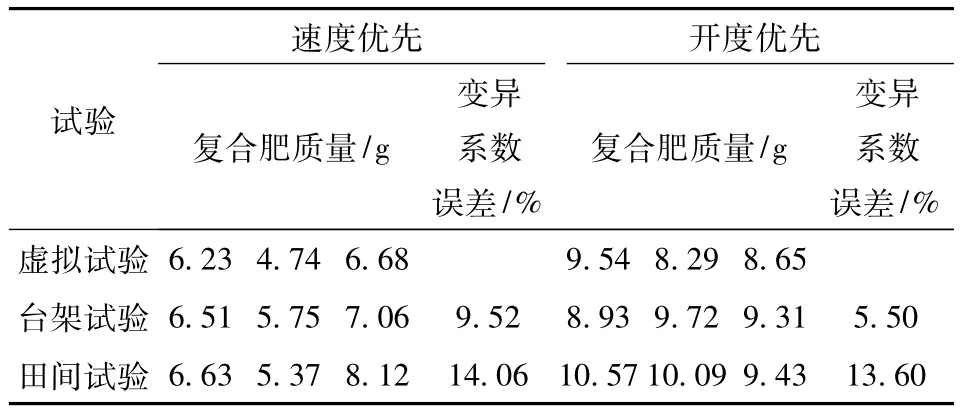
表2 验证结果对比Tab.2 Com parison of verification result
由表2可以看出,改进后的排肥槽轮c采用速度优先控制策略、开度优先控制策略时,台架试验与虚拟仿真试验相比较,排肥量稳定性变异系数误差分别为9.52%和5.50%;田间试验与虚拟仿真试验相比较,排肥量稳定性变异系数误差分别为14.06%和13.60%。对比发现3种试验情况下(田间试验、台架试验和虚拟仿真试验),排肥器排肥量稳定性变异系数和误差依次增大,这是因为离散元仿真试验采用的是理想模型,而实际试验中客观因素,比如颗粒肥料的不规则、机械结构加工误差、测量仪器的检验误差等,导致施肥机排肥稳定性的相对降低,但是其结果仍具有一定的实用参考价值。
通过对表2数据结果的进一步挖掘,发现开度优先控制策略时的排肥量稳定性变异系数较速度优先控制时大,但是其误差较小,变异系数波动范围小,这与之前离散元仿真结果一致,验证了仿真分析模型对施肥机排肥性能预测的准确性。
6 结论
(1)运用参数化建模软件Pro/E 5.0以及离散元仿真软件EDEM 2.2,建立稻麦精准变量施肥机排肥器离散元仿真模型,对改进后的外槽轮排肥器进行排肥特性运动仿真分析。
(2)基于离散元法对施肥机排肥性能进行研究,仿真试验表明:改进后的外槽轮式排肥器排肥量标准差减小了14.59 g,变异系数平均值降低了9.9%,排肥稳定性最好;采用转速优先控制策略,当排肥开度为19.34 mm时,施肥机排肥变异系数最小,为1.09%,排肥稳定性最好;采用开度优先控制策略,当排肥槽轮转速为55.75 r/min时,施肥机排肥量变异系数出现最小值,为1.85%,排肥稳定性最好。
(3)改进后的排肥槽轮验证试验表明,与仿真试验排肥量稳定性变异系数相比,台架试验误差分别为 9.52%和 5.50%,田间试验误差分别为14.06%和13.60%,且改进后的排肥器排肥量稳定性变异系数变化趋势与离散元仿真分析结果一致,验证了离散元仿真模型对施肥机排肥性能预测的准确性。
1 McBRATNEY A,WHELAN B,ANCEV T,et al.Future directions of precision agriculture[J].Precision Agriculture,2005,6 (1):7-23.
2 BLACKMORE B S.An information system for precision farming[C]∥Presented at the Brighton Crop Protection Conference on Pests and Diseases,Brit Crop Protect Council,1996:18-21.
3 BOUROUBIY,TREMBLAY N,VIGNEAULT P,et al.Fuzzy logic approach for spatially variable nitrogen fertilization of corn based on soil,crop and precipitation information[J].Computational Science and Its Application,2011,6782:356-368.
4 齐兴源,周志艳,杨程,等.稻田气力式变量施肥机关键部件的设计与试验[J/OL].农业工程学报,2016,32(6):20-26.http:∥www.tcsae.org/nygcxb/ch/reader/view_abstract.aspx?flag=1&file_no=20160603&journal_id=nygcxb.DOI:10.11975/j.issn.1002-6819.2016.06.003.QI Xingyuan,ZHOU Zhiyan,YANG Cheng,et al.Design and experiment of key parts of pneumatic variable-rate fertilizer applicator for rice production[J/OL].Transactions of the CSAE,2016,32(6):20-26.(in Chinese)
5 JONES JR,LAWRENCE H G,YULE IJ.A statistical comparison of international fertiliser spreader testmethods—confidence in boutwidth calculations[J].Powder Technology,2008,184(3):337-351.
6 古玉雪,苑进,刘成良.基于模糊系统的开度转速双变量施肥控制序列生成方法[J].农业工程学报,2011,27(11):134-139.GU Yuxue,YUAN Jin,LIU Chengliang.FIS-based method to generate bivariate control parameters regulation sequence for fertilization[J].Transactions of the CSAE,2011,27(11):134-139.(in Chinese)
7 YUAN J,LIU C L,LIY M,et al.Gaussian processes based bivariate control parameters optimization of variable-rate granular fertilizer applicator[J].Computers and Electronics in Agriculture,2010,70(1):33-41.
8 王金武,潘振伟,周文琪,等.SYJ-2型液肥变量施肥机设计与试验[J/OL].农业机械学报,2015,46(7):53-58.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20150708&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2015.07.008.WANG Jinwu,PAN Zhenwei,ZHOUWenqi,etal.Design and testof SYJ-2 type liquid variable fertilizer[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2015,46(7):53-58.(in Chinese)
9 胡建平,周春健,侯冲,等.磁吸板式排种器充种性能离散元仿真[J/OL].农业机械学报,2014,45(2):94-98.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20140216&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2014.02.016.HU Jianping,ZHOU Chunjian,HOU Chong,et al.Simulation analysis of seed-filling performance ofmagnetic plate seed-metering device by discrete elementmethod[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2014,45(2):94-98.(in Chinese)
10 JONATHAN H.Using discrete element modeling to evaluate material distribution using spinner-disc spreaders[D].Auburn: Auburn University,2012.
11 陈进,周韩,赵湛,等.基于EDEM的振动种盘中水稻种群运动规律研究[J].农业机械学报,2011,42(10):79-83.CHEN Jin,ZHOU Han,ZHAO Zhan,et al.Analysis of rice seedsmotion on vibrating plate using EDEM[J].Transactions of the Chinese Society for Agricultural Machinery,2011,42(10):79-83.(in Chinese)
12 Van LIEDEKERKE P,TIJSKENSE,RAMON H.Discrete element simulations of the influence of fertiliser physical properties on the spread pattern from spinning disc spreaders[J].Biosystems Engineering,2009,102(4):392-405.
13 COETZEE C J,LOMBARD S G.Discrete element method modelling of a centrifugal fertiliser spreader[J].Biosystems Engineering,2011,109(4):308-325.
14 胡永光,杨叶成,肖宏儒,等.茶园施肥机离心撒肥过程仿真与参数优化[J/OL].农业机械学报,2016,47(5):77-82.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20160511&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2016.05.011.HU Yongguang,YANG Yecheng,XIAO Hongru,etal.Simulation and parameter optimization of centrifugal fertilizer spreader for tea plants[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2016,47(5):77-82.(in Chinese)
15 杨叶成.茶园离心撒肥装置工作参数优化与试验研究[D].镇江:江苏大学,2016.YANG Yecheng.Operating parameter optimization and experiment on centrifugal fertilizer distributor for tea fields[D].Zhenjiang:Jiangsu University,2016.(in Chinese)
16 苑进,刘勤华,刘雪美,等.多肥料变比变量施肥过程模拟与排落肥结构优化[J/OL].农业机械学报,2014,45(11): 81-87.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20141113&journal_id=jcsam.DOI: 10.6041/j.issn.1000-1298.2014.11.013.YUAN Jin,LIU Qinhua,LIU Xuemei,et al.Granularmulti-flows fertilization process simulation and tube structure optimization in nutrient proportion of variable rate fertilization[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2014,45(11):81-87.(in Chinese)
17 苑进,刘勤华,刘雪美,等.配比变量施肥中多肥料掺混模拟与掺混腔结构优化[J/OL].农业机械学报,2014,45(6): 125-132.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20140620&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2014.06.020.YUAN Jin,LIU Qinhua,LIU Xuemei,et al.Simulation ofmulti-fertilizers blending process and optimization of blending cavity structure in nutrient proportion of variable rate fertilization[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2014,45(6):125-132.(in Chinese)
18 马征,李耀明,徐立章.农业工程领域颗粒运动研究综述[J/OL].农业机械学报,2013,44(2):22-29.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20130205&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2013.02.005.MA Zheng,LI Yaoming,XU Lizhang.Summarize of particle movement research in agricultural engineering realm[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2013,44(2):22-29.(in Chinese)
19 邱白晶,姜国微,杨宁,等.水稻籽粒流对承载板冲击过程离散元分析[J].农业工程学报,2012,28(3):44-49.QIU Baijing,JIANG Guowei,YANG Ning,et al.Discrete elementmethod analysis of impact action between rice particles and impact-board[J].Transactions of the CSAE,2012,28(3):44-49.(in Chinese)
20 赵湛,李耀明,陈义,等.水稻籽粒碰撞力学特性研究[J/OL].农业机械学报,2013,44(6):88-92.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20130617&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2013.06.017.ZHAO Zhan,LIYaoming,CHEN Yi,et al.Impactmechanical characteristics analysis of rice grain[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2013,44(6):88-92.(in Chinese)
21 施印炎,陈满,汪小旵,等.稻麦精准追肥机执行机构的设计与试验[J].华南农业大学学报,2015,36(6):119-124.SHIYinyan,CHEN Man,WANG Xiaochan,et al.Design and experiment of precision fertilizer applicator actuator of rice and wheat[J].Journal of South China Agricultural University,2015,36(6):119-124.(in Chinese)
22 陈满,施印炎,汪小旵,等.基于光谱探测的小麦精准追肥机设计与试验[J/OL].农业机械学报,2015,46(5):26-32.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20150505&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2015.05.005.CHEN Man,SHIYinyan,WANG Xiaochan,et al.Design and experiment of variable rate fertilizer applicator based on crop canopy spectral reflectance[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2015,46(5):26-32.(in Chinese)
23 陈满,施印炎,汪小旵,等.冬小麦精准追肥机专家决策系统[J/OL].农业机械学报,2015,46(7):17-22.http:∥www.jcsam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20150703&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2015.07.003.CHEN Man,SHIYinyan,WANG Xiaochan,et al.Expert decision system of variable nitrogen application in winter wheat[J/ OL].Transactions of the Chinese Society for Agricultural Machinery,2015,46(7):17-22.(in Chinese)
24 王成军,刘琼,马履中,等.棉籽颗粒在三自由度混联振动筛面上的运动规律[J/OL].农业工程学报,2015,31(6):49-56.http:∥www.tcsae.org/nygcxb/ch/reader/view_abstract.aspx?flag=1&file_no=20150607&journal_id=nygcxb.DOI:10.3969/j.issn.1002-6819.2015.06.007.WANG Chengjun,LIU Qiong,MA Lüzhong,et al.Cottonseed particlemotion law in 3-DOF hybrid vibration screen surface[J/ OL].Transactions of the CSAE,2015,31(6):49-56.(in Chinese)
Analysis and Experiment of Fertilizing Performance for Precision Fertilizer Applicator in Rice and Wheat Fields
SHIYinyan1CHENMan2WANG Xiaochan1,3ODHIAMBOM O1ZHANG Yongnian1DINGWeimin1,3
(1.College of Engineering,Nanjing Agricultural University,Nanjing 210031,China 2.Nanjing Research Institute for Agricultural Mechanization,Ministry of Agriculture,Nanjing 210014,China 3.Jiangsu Province Engineering Laboratory for Modern Facilities Agricultural Technology and Equipment,Nanjing 210031,China)
As one of the most widely applied technology at present,near-earth spectrum detection technology has been used in precise variable fertilizer applicator for rice and wheat.In order to improve fertilizing performance stability and control precision of variable rate fertilizer applicator,the discrete element simulation model of outer groove-wheel variable applicator was established.To achieve the optimal structure of outer groove-wheel fertilizer apparatus,the discrete elementmethod(DEM)and EDEM 2.2 softwarewere put into use to analyze and numerically simulate the fertilizing performance.The effect of different fertilizer apparatus structures and control strategies for fertilizing on the stability of variable fertilization was studied,and with bench test and field trial to verify the accuracy of simulation model.The results showed that the fertilization variability of improved apparatus was significantly decreased,and the standard deviation was decreased by 14.59 g,the variation coefficientwas reduced by 9.9%.When the control strategy of speed priority was adopted,as the groove-openingwas19.34mm,it had the optimum fertilizer stability of 1.09%.When the control strategy of groove-opening priority was adopted,as the rotary speed of groove-wheel was 55.75 r/min,the minimal fertilizer variability was 1.85%.And compared with the verification test results,the errorswere less than 8.87%,9.52%and 5.50%,respectively,verifying the accuracy of simulation and analysis for particle movement process in agricultural equipment using the DEM.The study illustrated that the improved fertilizer apparatus could perfect the stability of fertilizer and satisfy the demands of precision variable fertilization.
variable fertilization;outer groove-wheel;stability of fertilization;discrete element analysis
S183;S121
A
1000-1298(2017)07-0097-07
2016-11-08
2017-01-04
国家重点研发计划项目(2016YFD0200602-4)、“十二五”国家科技支撑计划项目(2013BAD08B04-8)和江苏省普通高校研究生科研创新计划项目(KYLX16_1017)
施印炎(1990—),男,博士生,主要从事农业机械化及其自动化研究,E-mail:2015212011@njau.edu.cn
汪小旵(1968—),男,教授,博士生导师,主要从事农业生物环境模拟与控制研究,E-mail:wangxiaochan@njau.edu.cn
10.6041/j.issn.1000-1298.2017.07.012
猜你喜欢
模具技术(2022年4期)2022-10-17
农业工程学报(2022年1期)2022-03-25
科学与财富(2021年33期)2021-05-10
北京汽车(2021年2期)2021-05-07
装备维修技术(2021年42期)2021-03-15
农业工程学报(2021年22期)2021-02-19
农业开发与装备(2021年1期)2021-02-08
发电技术(2020年3期)2020-06-29
数码世界(2018年10期)2018-11-13
戏剧之家(2018年21期)2018-10-19