坐标系变换在精密测量中的应用
2017-07-31 20:40蔡陈阳潘晓新
装备制造技术 2017年6期
蔡陈阳,潘晓新
(1.上汽通用五菱汽车股份有限公司,广西柳州545000;2.东风柳州汽车有限公司,广西柳州545000)
坐标系变换在精密测量中的应用
蔡陈阳,潘晓新
(1.上汽通用五菱汽车股份有限公司,广西柳州545000;2.东风柳州汽车有限公司,广西柳州545000)
介绍在三坐标测量仪上,运用坐标系旋转、平移方法测量零件形状、位置的原理、方法以及设备操作技巧。
坐标系变换;三坐标测量仪;零件形位;精密测量
不同性能和用途零件的形状各异,使得测量有一定的难度。零件形状、位置参数的测量,一般通过检测设备进行接触式或非接触式的测量方法求出。三坐标测量仪,属于接触式测量设备,对于被测的参数,都是通过其测量软件对测量数据进行读数和计算。万能工具显微镜,属于非接触式测量设备,对于被测的参数,除通过其测量软件对测量数据进行读数和计算之外,需要测量员手动采集被测元素。在精密测量中,不管是三坐标测量仪还是万工显,首先保证正确安装零件,即使零件的基准边与检测设备的X、Y、Z方向一致。其次,对于一些与机器X、Y、Z方向不一致的基准,就需要对坐标作合理的变换,以保证测量的准确性和便捷性。
本文介绍在三坐标测量仪和万能工具显微镜上,采用坐标系旋转方法测量零件形状、位置参数的方法和操作技巧。
1 坐标系变换简介
在三坐标测量仪测量过程中,使用的是空间笛卡尔坐标系,它的变换有两种情况:(1)坐标原点的空间平移(△X,△Y,△Z);(2)两根坐标轴绕第三根坐标轴旋转α角。
1.1 坐标原点的空间平移(△X,△Y,△Z)
由解析几何可知,如图1笛卡尔坐标系O点平移所示的原坐标系XYZ,其原点O平移(△X,△Y,△Z)以后,得到新坐标系X′Y′Z′,其原点O′.如空间中任意一点M在原坐标系XYZ的坐标值为(a,b, c),其O点平移任意坐标(△X,△Y,△Z)后,在新坐标系的坐标值为(a′,b′,c′),由笛卡尔坐标系平移的理论知识可知:
a′=a+△X
b′=b+△Y
c′=c+△Z
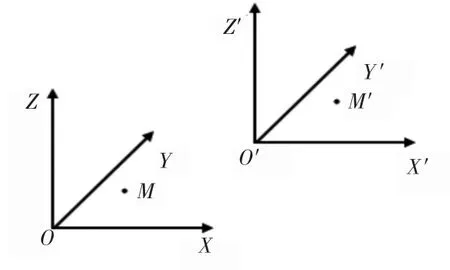
图1 笛卡尔坐标系O点平移
1.2 任意两根坐标轴绕第三根坐标轴旋转α角
如图2任意两根轴围绕第三轴旋转所示,原坐标系XYZ中的XZ轴绕Y轴旋转α角以后,得到新的坐标系X′Y′Z′,空间中任意一点M在坐标系XYZ和新坐标系X′Y′Z′中x,z轴方向的坐标值有变化,y轴向坐标值保持不变。
M点在坐标系XYZ中的坐标为(a,b,c),其中a =OP,c=OQ
M点在坐标系X′Y′Z′中的坐标为(a′,b′,c′),其中a′=O′S=OS,c′=O′R=OR
设∠MOP=α
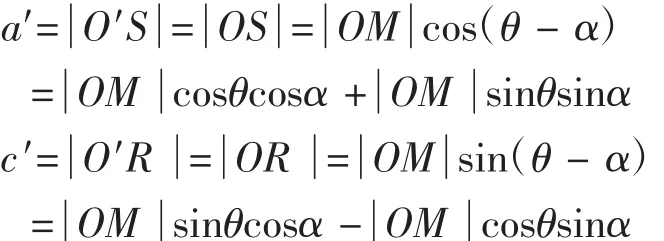
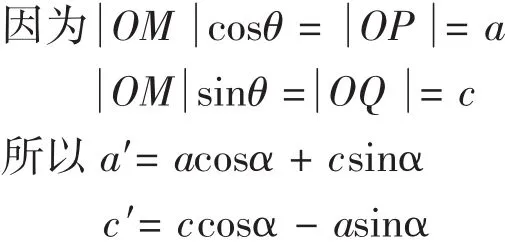
由上述推导可知,坐标系旋转后,用原坐标系坐标值表示新坐标系坐标的公式:

同理也可推导坐标系其他两种旋转方式的公式:
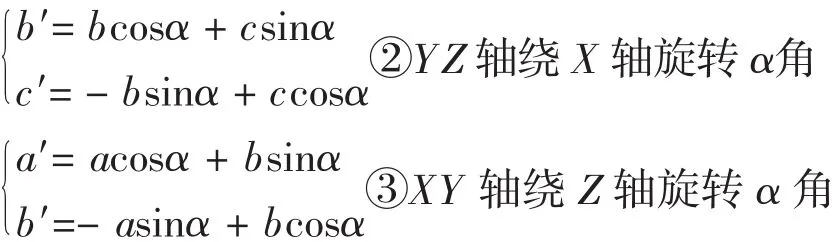
其中,α有正负之分,当逆时针旋转时,α为正;当顺时针旋转时,α为负。
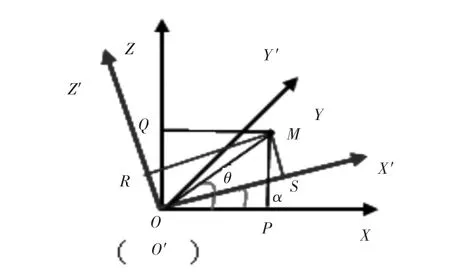
图2 任意两根轴围绕第三轴旋转
2 测量坐标系与测量原则
2.1 零件测量坐标系的建立
按图纸要求,确定零件基准,建立准确的零件测量坐标系,是保证测量结果准确性的首要条件。基准体现方法有模拟法、分析法和直接法三种(参考汪恺《形状和位置公差标准应用指南》)。模拟法是指零件图纸中基准属性无法构成笛卡尔坐标系,需借助检测设备的平台去构造模拟完整的笛卡尔坐标系,常用于薄片类零部件光学测量,如缸盖垫;分析法是指零件图纸上存在多个相关联的基准坐标系,需要通过转换计算才能与零部件实体基准一致;直接法,是指按被测零件图纸基准,通过测量设备采集零件实体基准信息并构造成测量坐标系,即测量坐标系与零件图纸基准坐标系一致。本文选用直接法来体现基准。
2.2 测量原则
在日常测量中,常常会遇到形状各异的零件,也有多种方法检测其形状和位置。但在测量过程中,应遵守如下测量原则:与理论要素比较原则(即实际测量值与图纸理论值及公差比较),测量特征参数原则(即根据待测量的尺寸参数,选择合适的测量设备),测量坐标值原则(即根据待测量的尺寸参数,选择合适的测量基准),测量跳动原则(即测量要素采集过程中,会受零部件表面粗糙度和设备识别精度的影响,存在测量误差),控制失效边界原则(测量要素采集过程中,采集点数量越多、范围越广,消除边界的影响)。
本文选用测量坐标值原则对零件进行测量。测量坐标值原则,就是测量被测实际要素的空间坐标值,并通过坐标系平移、旋转等方法获得正确测量结果,保证测量结果准确性。
3 测量实例
在三坐标测量仪上测量发动机零部件,运用坐标系平移、旋转方法的实例。
3.1 测量缸盖尺寸的实例
从图3缸盖正视图和图4缸盖剖面图,可看出进气导管与基准面的夹角为16.5°,其轴心线到基准C的距离为27 mm(即Z向距离);排气导管与基准面的夹角为15°,其轴心线到基准C的距离为22.75 mm(即Z向距离)。因为导管处于缸盖中间部位,导管孔直径小,所以三坐标自动在测量导管相关尺寸时,就需为每个导管建造独立的坐标系,这样既能让三坐标在测量过程中能精确定位,也能减少测量尺寸的叠加误差。下面介绍如何建立进排气第一根导管的坐标系:
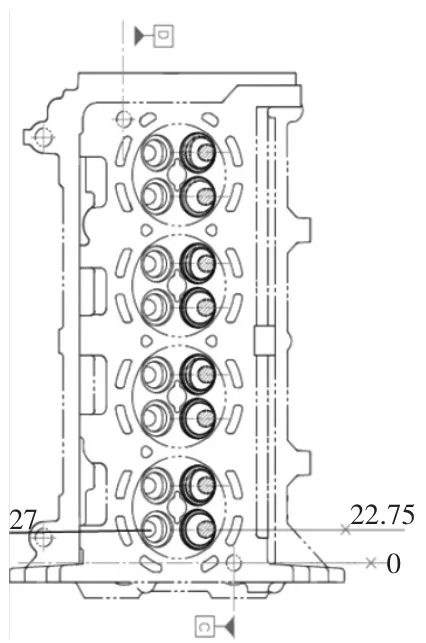
图3 缸盖正视图
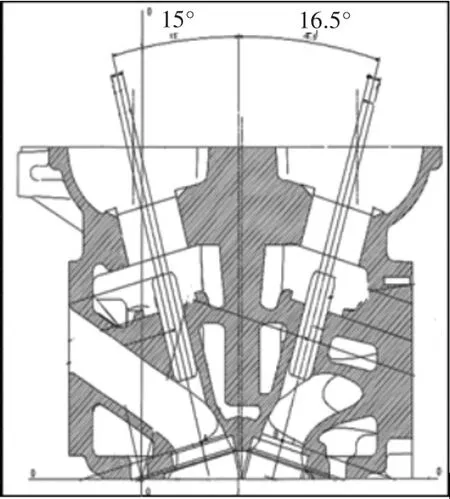
图4 缸盖导管剖面图
首先,在零件实物上采集BCD基准元素,并利用三坐标Calypso测量软件建立基础坐标Base Alignment BCD(蔡司三坐标测量软件Calypso操作指南),具体建造方法如图5所示。原点:圆C在基准面B上的投影圆的圆心;Y轴:过原点的基准面B的法线;Z轴:圆C、圆D在基准面B上两个投影圆的连线,即CD.但CD与机器坐标系的Z轴有夹角(如图6中的虚线),需要对此作特殊的处理,也就是在基础坐标中,必须使得圆D的X坐标值为-82 mm(由图纸给出),如图7所示。经过旋转即可得到基础坐标XYZ(Base Alignment BCD).

图5 缸盖基础坐标建立软件界面
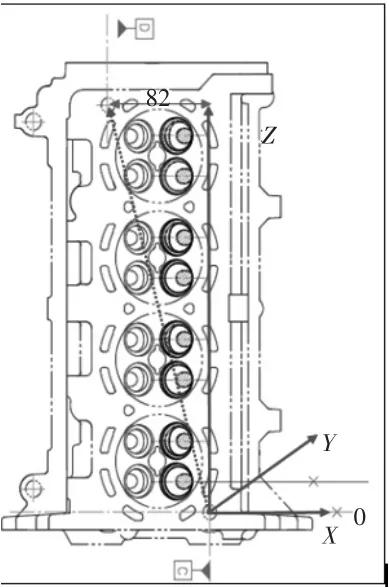
图6 缸盖基准
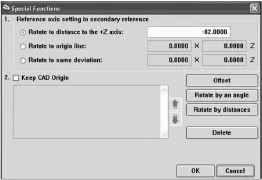
图7 缸盖基础坐标系平移
其次,在Base Alignment BCD的基础上变换出进气第一根导管和排气第一根导管的坐标系。
由图8可知,进气第一根导管的坐标系名称为Intake_01,它是由Alignment BCD的坐标系按图9的命令作相应的旋转和平移获得,它的X、Y、Z、原点构造元素依旧与Alignment BCD保持一致。首先,在Alignment BCD坐标系中,原点位置不变,绕Z轴顺时针旋转15°(即-15°);然后,保持X、Y、Z方向不变,将原点平移到(-27.82,-7.454 3,22.75).同一个元素在原坐标系Alignment BCD和新坐标系Intake_01的坐标值就会有相应的变化,调用公式①~③,具体计算如下:
圆ntake_circle_01在原坐标系的坐标值(-11.460 5,64.717 1,22.75)
绕Z轴顺时针旋转15°(即-15°),调用公式③

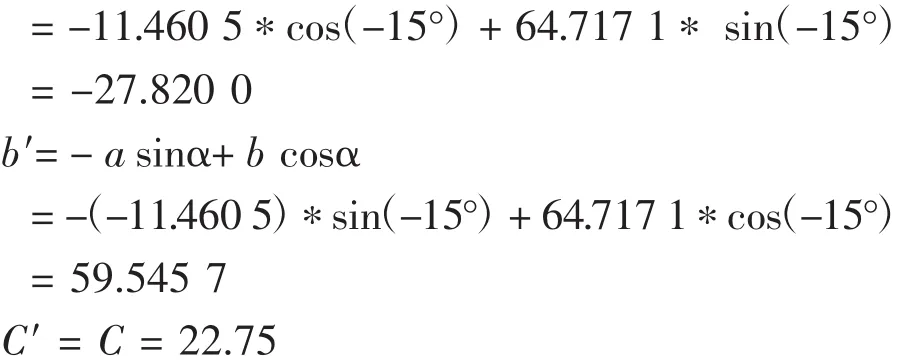
旋转后坐标值变为(-27.820 0,59.545 7,22.75)
将旋转后的坐标系原点平移(-27.82,7.454 3,22.75)
利用公式:a′=a+△X,b′=b+△Y,c′=c+△Z
在新坐标系Intake_01中,圆ntake_circle_01的坐标值变为(0,67.000 0,0)

图8 坐标系设置界面

图9 坐标系旋转设置
在三坐标的测量软件中,坐标系旋转和平移的公式隐藏在软件内部,无需再计算相应的坐标值,切换坐标系即可,如图10和图11所示。

图11 圆1在INTAKE-01坐标系下的坐标值
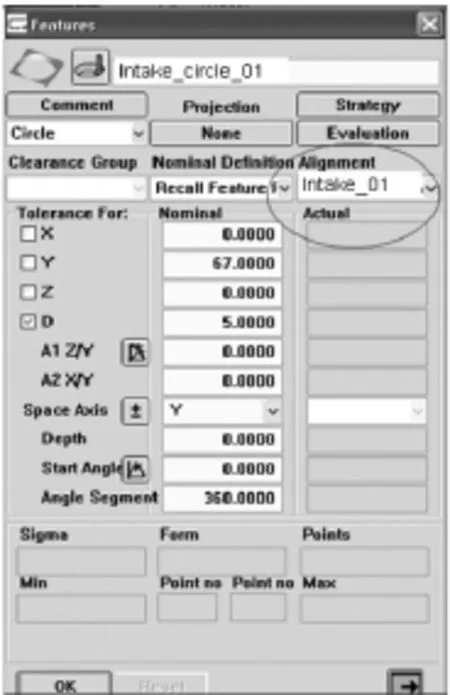
图10 圆1在BCD坐标系下的坐标值
同理,按排气导管的夹角和位置,对Alignment BCD坐标系进行相应的旋转和平移,即可获得新坐标和相应的坐标值。
3.2 测量曲轴油道尺寸的实例
如图12图13曲轴图纸可知,4根曲轴油道与基准的夹角为空间角度,将其分别投影在平面(轴心线与第1连杆颈构成)和止推面上,分别是:第1油道(14.5°,66.01)、第2油道(14.5°,66.01)、第3油道(14.5°,66.1)、第4油道(14.5°,66.01)。由此可知油道间角度和方向均不一致,为了精准测量,需给每根油道建立独立坐标系。
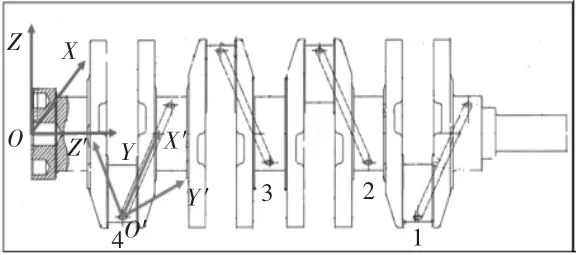
图12 曲轴正视图
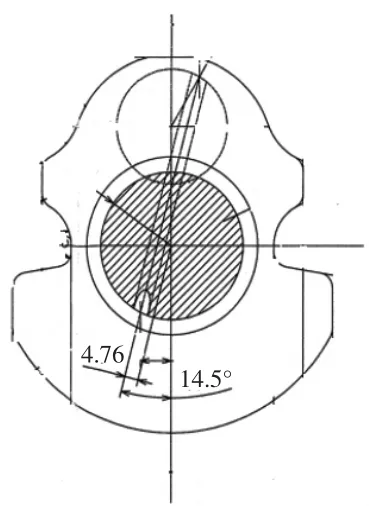
图13 曲轴油道剖面图
油道的独立坐标系均在基础坐标系XYZ经过移动坐标原点和旋转坐标轴获得,本文在此只讨论第1油道的坐标系建立:
基础坐标系如图12所示,首先将其坐标原点移至第4油道入口截圆的圆心上,其次将XY轴绕Z轴旋转14.5°获得新坐标系4th′,再将4th′坐标系中的XZ轴绕Y轴旋转66.1°,即可获得第4油道的独立坐标系4 th(如图12中的坐标系X′Y′Z′)。具体的转换数值,如缸盖计算一样,代入公式①~③即可。
4 结束语
在精密测量中,坐标系变换是常用的测量评估手段,不管是在三坐标测量还是其他精密设备的测量。但坐标系变换的原理都是一致的。目前,坐标系转换计算过程都会隐藏在测量软件内,输入转换命令,其变换结果就会立即呈现。但坐标系正确的变换是精确测量的关键。
[1]汪恺.形状和位置公差标准应用指南[M].北京:中国标准出版社,2000:100-101.
[2]蔡司.蔡司三坐标测量软件Calypso操作指南[Z].
Application of Coordinate System Transformation in Precise Measurement
CAI Chen-yang,PAN Xiao-xin
(1.SAIC Wuling Automobile Limited by Share Ltd.,Liuzhou Guangxi 5450000,China;2.Dongfeng Liuzhou Automotive Co.,Ltd.,Liuzhou Guangxi 545000,China)
In this paper,the principle and method of measuring the shape and position of the parts by means of the method of coordinate rotation and translation in the three coordinate measuring instrument are introduced.
coordinate system transformation;three coordinate measuring instrument;part shape;precise measurement
TG806
B
1672-545X(2017)06-0233-04
2017-03-04
蔡陈阳(1985-),女,广西人,学士,助理工程师,从事机械设计制造及自动化方面的研究;潘晓新(1985-),男,广西人,学士,助理工程师,从事机械设计制造及自动化方面的研究。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
建材发展导向(2021年13期)2021-07-28
装备制造技术(2020年11期)2021-01-26
装备制造技术(2020年1期)2020-12-25
探索科学(学术版)(2019年8期)2020-01-17
电子制作(2019年9期)2019-05-30
农业与技术(2018年18期)2018-12-18
中国铸造装备与技术(2017年3期)2017-06-21
电子制作(2017年7期)2017-06-05
物理教学探讨(2009年7期)2009-06-08