基于光电编码器的角加速度观测器设计
2017-07-12 11:36李鹏飞汪光森张向明欧阳斌
计算技术与自动化 2017年2期
李鹏飞++汪光森++张向明++欧阳斌++张育兴

摘 要:现代伺服控制系统中经常需要加速度信息来实现加速度反馈控制,在旋转运动形式的伺服系统中,通过基于电机模型的观测器算法估计出角速度或角加速度,其性能远远不及采用角加速度传感器直接测量的方法,而角加速度传感器又存在价格昂贵和技术指标适用范围窄的问题。论文提出了一种角加速度观测方案,利用光电编码器输出的角位移信号及观测对象的模型信息,估计出伺服系统角加速度,并通过RT-LAB实验平台进行硬件在回路仿真实验,能够实现对角位移、角速度和剧烈变化的角加速度的观测,效果良好,验证了算法的鲁棒性和精确性。论文提出的角加速度观测方案还可以应用于非电机驱动的伺服系统中,其适用范围更广,成本低,更适合工程应用。
关键词:光电编码器;角加速度观测器;硬件在回路;加速度反馈控制
中图分类号:TH113.2 文献标识码:A
Abstract:Acceleration information is often needed to realize the acceleration feedback control in modern servo control systems, while in the rotary motion form the observer algorithm based on motor model to estimate the angular velocity or angular acceleration is far less than the method to use an acceleration transducer. But the rotating accelerometer is high priced and restricts the application range because of its performance index. The article proposed an angular acceleration algorithm based on angular information measured by photoelectric encoder and model information of the observing object, which can estimate the acceleration of the servo control systems. It can also observe the angular rotation, angular velocity and severely changed angular acceleration with excellent effects which verified the robustness and feasibility through the hardware in the loop simulation based on RT-LAB platform. The proposed algorithm can also suit for servo systems which was not droved by motors and apply more widely, whats more, the low costs make it more suitable for engineering.
Keywords:photoelectric encoder;angular acceleration observer;hardware in the loop;acceleration feedback control
1 引言
伺服系統多数以位置和速度为跟踪目标[1],文献[2]中,刘栋良等针对永磁同步电机,利用其定子交轴电流和转速方程构造观测器,通过降维线性Luenberger算法实现了电机转子角速度的估算。文献[3]中,郭鸿浩等人针对永磁无刷直流电机提出了角加速观测方法,首先通过构建滑模观测器观测反电动势波形,再设计卡尔曼滤波器从观测得到的反电动势归一化波形中提取位置信息,进而实现对角加速度的估计,但是扩展反电动势的表达式较为复杂,其大小与转速、电机电流及微分值有关,鲁棒性较差。且对于非电机驱动的轴系,这种依赖电机模型的估计方法也无能为力。工程实践中,大多数情况下伺服系统旋转运动为非匀速运动,传统的角速度观测算法仅限于处于稳态的恒定角速度观测,对于动态加减速过程的角速度或均匀变化的角加速度的观测存在较大误差,并且机电或液压等伺服系统由于存在内部和外部的干扰、自身参数的摄动等不确定因素,严重影响观测算法的性能。因此,对于旋转伺服系统的转速观测,基于编码器的方法更为可靠,中国科学院自动化研究所的秦晓飞等对传统的M/T测速算法进行了改进[4],提出一种基于假脉冲剔除的M/T测速算法,能够消除机械振动引起的位置量化误差,提高了交流伺服系统的测速性能;北京交通大学的文晓艳等详细讨论了M法和T法在工程实践中的应用并对其性能做了详细分析[5],指出工程应用中应该注意的问题。然而这两种方法并不适用于对角加速的观测,目前基于旋转加速度计的方法测量角加速度存在传感器价格昂贵或技术指标适用范围窄等原因[6],使得其难以应用于角加速度反馈或角速度反馈的控制过程;基于电机模型的观测器算法估计角速度或角加速度也是一种常用方法[7-10],大量实验表明,基于模型观测器估计算法的加速度反馈控制系统,其控制性能远远不及基于加速度传感器的加速度反馈控制系统,Bramde Jager[11]和Ivan Godler[12]等人分别对此作出了详细研究。因此基于位置传感器和观测算法来有效获取角速度和角加速度信息是一种折中的选择。论文采用高阶观测器算法,能够观测剧烈变化的转速,性能优于常规观测算法,且能够实现非剧烈变化的角加速度观测,为加速度反馈鲁棒控制提供一种有效方法,最后通过实验对比验证了论文提出的加速度观测算法的跟踪性能和算法的可实现性。
2 光电编码器工作原理
光电编码器是由光源、光栅盘和光电检测装置组成,光栅盘是在固定直径的圆盘上等分地开通若干个长方形孔,通过联轴器的带动,当光电编码盘和轴一起旋转时,光源发光通过透镜照射到光敏电阻上,经过检测装置检测输出脉冲信号。结构原理如图1所示。
光电编码器的输出量有模拟量和数字量两种形式,论文以数字编码器为例进行研究。数字增量式编码器直接利用光电转换原理输出3组方波脉冲信号,分别为A相、B相和C相, A相与B相的相位差为90度,C相为每转一周输出一个脉冲,用于基准点定位,输出波形如图2所示。
编码器旋转方向的判断是通过将A相B相输出值保存起来,与下一个A相B相输出值做比较,通过编码时序就可以判断出编码器的旋转方向,图2中标示出了输出波形与编码器旋转方向的关系,算法的实现是通过判断编码器输出AB两相的状态转移顺序,如图3所示。
增量式编码器测量转角的方法是通过读取脉冲数的方式计算出旋转的角度或转速等参数。而不同规格型号的编码器光栅码盘上的光栅线数是不同的,光栅线数决定每周输出的脉冲数量,即影响测量的精度。采用正交编码方式可以方便实现倍频电路设计,提高编码器测量精度。
3 三阶观测器设计
6 结论
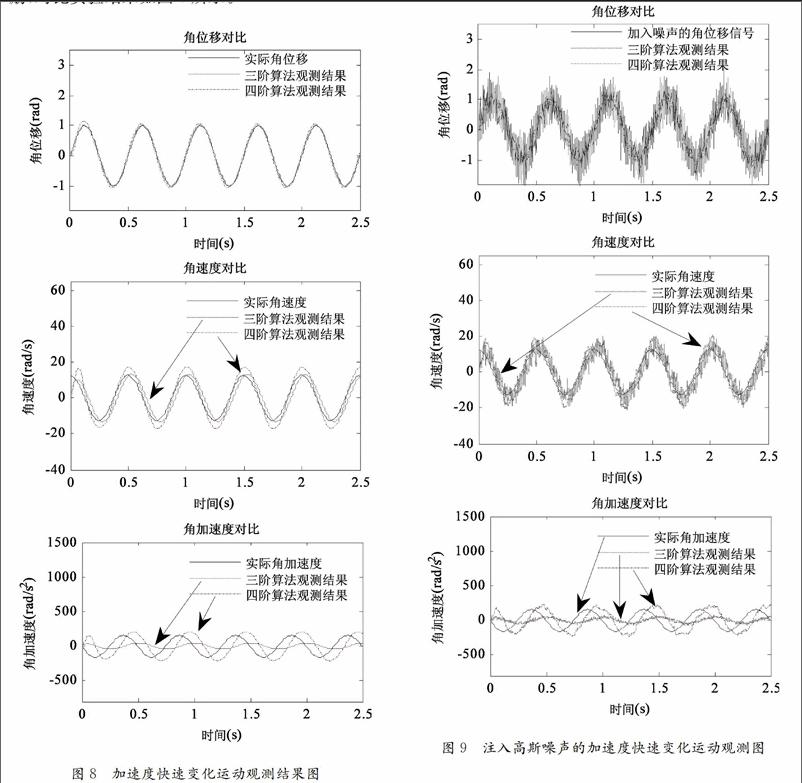
为了适应伺服控制系统中加速度反馈控制方式对角加速度进行观测的需求,论文提出一种基于增量式光电编码器和观测算法相结合的方法,用于观测角加速度变化规律,并通过半实物仿真平台进行验证,观测效果良好,克服了采用旋转加速度计价格昂贵和适用范围小的问题,克服了基于电机模型纯算法估计的不准确问题,克服了针对非电机驱动的旋转伺服系统无法使用估计算法的问题。计算量小,可以应用于实时系统,跟踪性能好,可以实现角位移,角速度和剧烈变化的角加速度的观测,满足伺服系统的控制需求。
参考文献
[1] 邓红星,王宪彬,刘咔.角加速度边界层观测器设计[J].哈尔滨工业大学学报,2010,42(9):1504-1508.
DENG Hong-xing,WANG Xian-bin,LIU Ka.Design of an angular acceleration boundary observer[J].
JOURNAL OF HARBIN INSTITUTE OF TECHNOLOGY,2010,42(9):1504-1508.
[2] 劉栋良,郑谢辉,崔丽丽.无速度传感器永磁同步电机反推控制[J].电工技术学报,2011,26(9):67-72.
LIU Dong-liang,ZHENG Xie-hui,CUI Li-li.Backstepping Control of Speed Sensorless Permanent Magnet Synchronous Motor[J].TRANSACTIONS OF CHINA ELECTROTECHNICAL SOCIETY,2011,26(9):67-72.
[3] 郭鸿浩,周波,刘颖,许恩利.永磁无刷直流电机角加速度估计[J].电工技术学报,2014,29(5):93-103.
GUO Hong-hao,ZHOU Bo,LIU Ying,XU En-li,You Xia.Angular Acceleration Estimation for a Permanent Magnet Brushless DC Motor[J].TRANSACTIONS OF CHINA ELECTROTECHNICAL SOCIETY,2014,29(5):93-103.
[4] 秦晓飞,王云宽,郑军,于家斌.交流伺服系统振动鲁棒M/T测速算法[J].电机与控制学报,2010,14(5):97-103.
QIN Xiao-fei,WANG Yun-kuan,ZHENG Jun,YU Jia-bin.Mechanical-vibration-robust M/T speed detection method of AC servo system[J].ELECTRIC MACHINES AND CONTROL,2010,14(5):97-103.
[5] 文晓燕,郑琼林,韦克康,王琛琛.增量式编码器测速的典型问题分析及应对策略[J].电工技术学报,2012,27(2):185-190.
Wen Xiaoyan,Zheng Qionglin,Wei Kekang,Wang Chenchen.Typical Issues Analysis and Corresponding Strategy for Incremental Encoder Speed Measurement[J].TRANSACTIONS OF CHINA ELECTROTECHNICAL SOCIETY,2012,27(2):185-190.
[6] 郝双晖,刘勇,刘杰,郝明晖.基于查表原理的单对磁极编码器研制[J].中国电机工程学报,2006,26(19):165-168.
HAO Shuang-hui,LIU Yong,LIU Jie,HAO Ming-hui.Design of Single Pair-pole Magnetic Encoder Based on Looking-up Table[J].Proceedings of the CSEE,2006,26(19):165-168.
[7] 王皖君,张为公,李旭.变速器试验台惯量电模拟与角加速度估计[J].东南大学学报(自然科学版),2012,42(1):62-66.
Wang Wanjun,Zhang Weigong,Li Xu.Inertia electrical emulation and angular acceleration estimation for transmission test rig[J].JOURNAL OF SOUTHEAST UNIVERSITY (Natural Science Edition),2012,42(1):62-66.
[8] Seung H. Jeong,Seul Jung,and M. Tomizuka.Attitude Control of a Quad-rotor System Using an Acceleration-based Disturbance Observer An Empirical Approach[C].The 2012 IEEE/ASME International Conference on Advanced Intelligent Mechatronics,Kaohsiung,Taiwan, July,2012.
[9] Trong Biên Hoàng,William Pasillas-Lépine,Alexandre De Bernardinis and Mariana Netto.Extended Braking Stiffness Estimation Based on a Switched Observer With an Application to Wheel-Acceleration Control[J].IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY,2014,22(6):2384-2392.
[10] 王萍,李斌,黃瑞祥,李桂丹.基于神经网络的无速度传感器直接转矩控制系统的研究[J].电工技术学报,2003,18(2):5-8.
WANG Ping,LI Bin,HUANG Rui-xiang,LI Gui-dan.Study of Speed-Sensorless Direct Torque Control System Based on Neural-Network[J].TRANSACTIONS OF CHINA ELECTROTECHNICAL SOCIETY,2003,18(2):5-8.
[11] Bram de Jager.Acceleration assisted tracking control[J].IEEE Control Systems Magazine,1994,14(5):20-27.
[12] Ivan Godler,Masahiro Inoue,Tamotsu,Tadashi Yamashita.Robust comparison of control schemes with disturbances observer and with acceleration control loop[J].Industrial Electronics,1999,3:1035-1040.
[13] 韩旭忠,孙颖.高阶惯性环节状态反馈极点配置的一种简易方法[J].中国电机工程学报,2002,22(4),118-121.
HAN Zhong-xu,SUN Ying.A SIMPLE METHOD FOR STATE FEEDBACK'S POLE-PLACEMENT IN HIGH-ORDER INERTIA LINK[J].Proceedings of the CSEE,2002,22(4),118-121.
[14] 郭劲,王卫兵,陈娟,王挺峰,姜振华.最小节拍组合控制方法在光电跟踪系统中的应用[J].光学精密工程,2013,21(10),2594-2601.
GUO Jin,WANG Wei-bing,CHEN Juan,WANG Tiing-feng,JIANG Zhen-hua.Application of minimal prototype control method in opto-electronics tracking system[J].Optics and Precision Engineering,2013,21(10),2594-2601.