
六自由度IRB2400机器人运动学分析及轨迹规划
2017-07-10 01:41陈超李俊牛怡珺
科技风 2017年7期
关键词:仿真
陈超 李俊 牛怡珺

摘 要:以IRB2400機器人为研究对象,对机器人进行了正运动学和逆运动学分析,在此基础上采用三次多项式和五次多项式对机器人进行轨迹规划。机器人轨迹规划的仿真通过ADAMS软件实现,结果表明,五次多项式得到的作业性能优于三次多项式插值法。
关键词:IRB2400机器人;运动学分析;轨迹规划;仿真
近年来,机器人得到了非常迅速的发展。因此,对机器人进行运动学分析和轨迹规划研究具有非常重要的意义。机器人控制的基础就是运动学分析,通过运动学分析可以确定机器人末端执行器的位姿[ 1 ]。机器人轨迹规划常用的方法有多项式、样条曲线、抛物线以及不同曲线相结合的方法[ 2 ]。
1 IRB2400机器人运动学分析
1.1 机器人D-H坐标系的建立
IRB2400机器人是ABB公司生产的一款工业机器人,该机器人是仿造人的手臂设计的关节型机器人,总共有6个自由度,每个自由度对应一个转动副,运用D-H参数法建立机器人连杆坐标系如图1所示。
根据IRB2400机器人D-H坐标系得到机器人的各个连杆的运动参数和结构参数如表1所示:
1.2 机器人运动学正解分析
根据第i根连杆的D-H参数,可以得出齐次坐标变换矩阵Ai,Ai描述了第i根连杆相对于第i+1根连杆坐标系的位姿。现列出所有的齐次坐标变换矩阵:
1.3 机器人运动学逆解分析
2 机器人末端执行器轨迹规划
机器人在工作过程中的运动轨迹称为机器人轨迹,对机器人末端执行器的位姿变化路径、速度和加速度进行规划,以满足机器人作业要求称为机器人轨迹规划[ 3 ]。
机器人轨迹规划主要包括:多项式、样条曲线、抛物线以及不同曲线相结合的方法。针对此本文将用五次多项式对机器人进行轨迹规划,同时将得到的结果与三次多项式进行对比分析。对于三次多项式插值,为了保证机器人系统可以平稳的作业,则各关节的轨迹函数至少应该满足:起止点有位置约束和速度约束。对于五次多项式插值,其约束条件在三次多项式的基础上增加了起止点加速度约束。在直角坐标空间进行机器人轨迹规划是将末端执行器位姿、速度和加速度表示为时间的函数,根据末端执行器的信息可以得到机器人相应关节的位置、速度和加速度等参数[ 4 ]。
3 机器人数字化建模与仿真分析
3.1 机器人建模与编辑
运用SolidWorks建立IRB2400机器人的三维模型,然后,根据机器人的相互配合关系对IRB2400机器人进行组装,最后将装配模型导入ADAMS中完成相应的参数设置。机器人末端执行器轨迹的设定方法:在ADAMS软件中选取机器人末端执行器并为之添加驱动,驱动类型为位移,运用ADAMS自带的STEP函数构造X轴、Y轴和Z轴的驱动函数。然后检查模型的编辑是否正确完整。最后设置仿真时间和仿真步长。其中三次和五次多项式插值函数除了插值函数不同之外,其他参数完全一样。
3.2 仿真分析
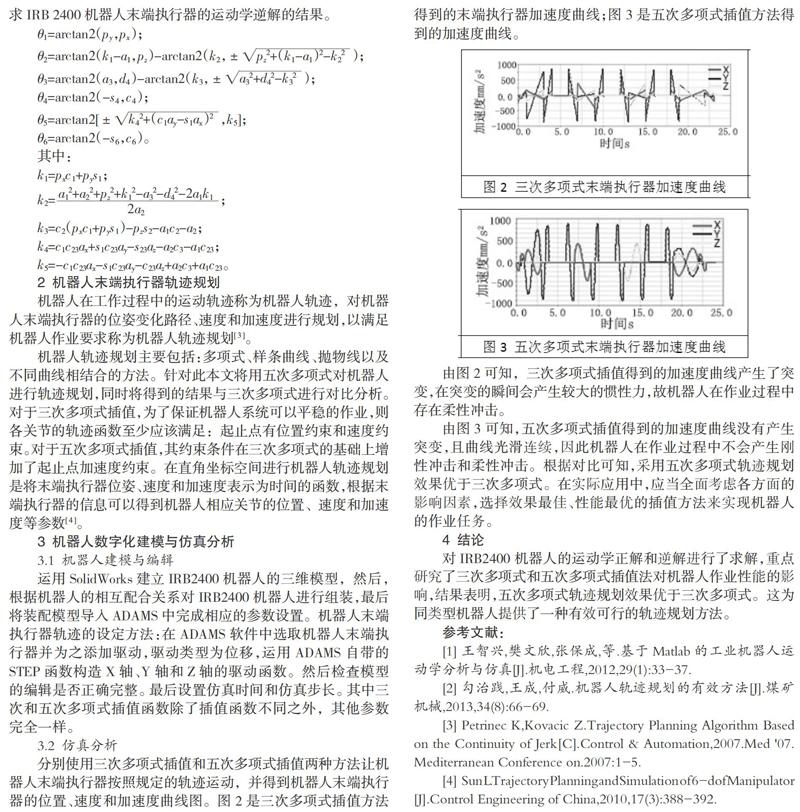
分别使用三次多项式插值和五次多项式插值两种方法让机器人末端执行器按照规定的轨迹运动,并得到机器人末端执行器的位置、速度和加速度曲线图。图2是三次多项式插值方法得到的末端执行器加速度曲线;图3是五次多项式插值方法得到的加速度曲线。
由图2可知,三次多项式插值得到的加速度曲线产生了突变,在突变的瞬间会产生较大的惯性力,故机器人在作业过程中存在柔性冲击。
由图3可知,五次多项式插值得到的加速度曲线没有产生突变,且曲线光滑连续,因此机器人在作业过程中不会产生刚性冲击和柔性冲击。根据对比可知,采用五次多项式轨迹规划效果优于三次多项式。在实际应用中,应当全面考虑各方面的影响因素,选择效果最佳、性能最优的插值方法来实现机器人的作业任务。
4 结论
对IRB2400机器人的运动学正解和逆解进行了求解,重点研究了三次多项式和五次多项式插值法对机器人作业性能的影响,结果表明,五次多项式轨迹规划效果优于三次多项式。这为同类型机器人提供了一种有效可行的轨迹规划方法。
参考文献:
[1] 王智兴,樊文欣,张保成,等.基于Matlab的工业机器人运动学分析与仿真[J].机电工程,2012,29(1):33-37.
[2] 勾治践,王成,付威.机器人轨迹规划的有效方法[J].煤矿机械,2013,34(8):66-69.
[3] Petrinec K,Kovacic Z.Trajectory Planning Algorithm Based on the Continuity of Jerk[C].Control & Automation,2007.Med '07. Mediterranean Conference on.2007:1-5.
[4] Sun L.Trajectory Planning and Simulation of 6-dof Manipulator[J].Control Engineering of China,2010,17(3):388-392.
猜你喜欢
中国教育技术装备(2016年20期)2016-12-12
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
科技资讯(2016年18期)2016-11-15
科技资讯(2016年18期)2016-11-15
价值工程(2016年29期)2016-11-14
数字技术与应用(2016年9期)2016-11-09
数字技术与应用(2016年9期)2016-11-09
科技视界(2016年18期)2016-11-03
科技视界(2016年18期)2016-11-03
企业导报(2016年6期)2016-04-21
