一种光电经纬仪目标仿真训练系统的研究
2017-07-08 13:25胡长德高娟王林旭刘坚强李春燕耿
光学仪器 2017年3期
关键词:模拟训练
胡长德+高娟+王林旭+刘坚强+李春燕+耿华芳
摘要: 设计了一种光电经纬仪目标仿真训练系统。结合光电经纬仪任务情况,按照设备操作、指标测试、维护保养、应急排障和任务流程演练五大模块,设置了近40个操作科目;研究并确立各类飞行器航迹的建模策略;利用UG和Unity3D实现了经纬仪重要部件的建模和控制;用LabVIEW完成了应急排障模块的各类故障波形;用Eduis为各科目制作了系统详尽的多媒体讲解视频;设计了科学合理教学训练考核评估模型,对学员各种操控技能的训练结果进行考核评估,并通过单杆实例验证该系统设计满足要求。
关键词: 光电经纬仪; 模拟训练; 目标仿真; VC++; Unity3D; LabVIEW
中图分类号: TP 274 文献标志码: A doi: 10.3969/j.issn.1005-5630.2017.03.014
Study on the system of target simulation training of photoelectric theodolite
HU Changde, GAO Juan, WANG Linxu, LIU Jianqiang, LI Chunyan, GENG Huafang
(Changping College of Non-commissioned Officer, the Academy of Equipment, Beijing 102200, China)
Abstract: The system of target simulation training of photoelectric theodolite is presented.Almost 40 operation courses are set according to five modules,which are equipment operation,parameter testing,maintaining,trouble shooting and task flow.Modeling strategy of several kinds of aircraft track is studied and set.The modeling and controlling of the key parts of photoelectric theodolite are achieved with the software of UG and Unity3D.Then the fault waveform of the equipment failure is completed by the LabVIEW.With the Eduis,the multi-medias of the operation courses are done.Then scientific and reasonable assessment model is studied and set to evaluate the operation of the handler.Finally,it evaluates the training results and it shows the system of target simulation training of photoelectric theodolite meets the requirements.
Keywords: photoeletric theodolite; simulation training; target simulation; VC++; Unity3D; LabVIEW
引 言
光電经纬仪是一种重要的光电跟踪测量设备,能够动态、实时地跟踪目标并用图像记录下目标运动轨迹,同时具有测量精度高、所受干扰少、能够获取目标辐射特性参数等优点,因而在航空、航天、靶场测
控系统等军事及科研领域中有着广泛的应用[1-3]。经纬仪基本的工作过程为操作手拉动单杆使目标进入电视视场,由波门捕获目标后进入闭环自动跟踪,其关键之处在于对目标的捕获和跟踪。现有的光电经纬仪模训系统基本是对操作手捕获跟踪目标能力进行反复训练,主要用于运动目标轨迹生成和视景仿真[4-5],而对于光电经纬仪组成与工作原理、操作方法和任务流程、故障排查和维护保养等设备相关的系统学习、训练与考核还属于空白。本文基于军队测控试验训练需求,对光电经纬仪目标仿真训练系统进行了研究设计。在设计过程中,除满足训练科目要求外,还借鉴虚拟现实的实现方式,侧重于营造逼真的训练场景,使操作人员产生强烈的真实感,同时也是为了弥补光电经纬仪模拟仿真、训练考核方面不够系统全面的不足[6-7]。
1 目标仿真训练系统的设计与组成
目标仿真训练系统包括仿真计算机、仿真训练软件及显示监视器等。仿真计算机由其他计算机兼顾(主控计算机或图像显示计算机),仿真训练软件包括目标仿真模块(含背景仿真)、仿真操作训练模块、仿真测控信息反馈模块及训练考核评估模块等,软件操作界面友好。要求系统具备实战任务模拟训练辅助支持及考核评估功能,参加培训的学员可通过训练考核评估软件选择参加训练考核的有关项目,在训练或考核过程中用计算机收集参试学员的操作信息,并对收到的操作信息按照一定的规则进行评测,完成实际训练效果的考核评估。
1.1 目标仿真训练系统组成
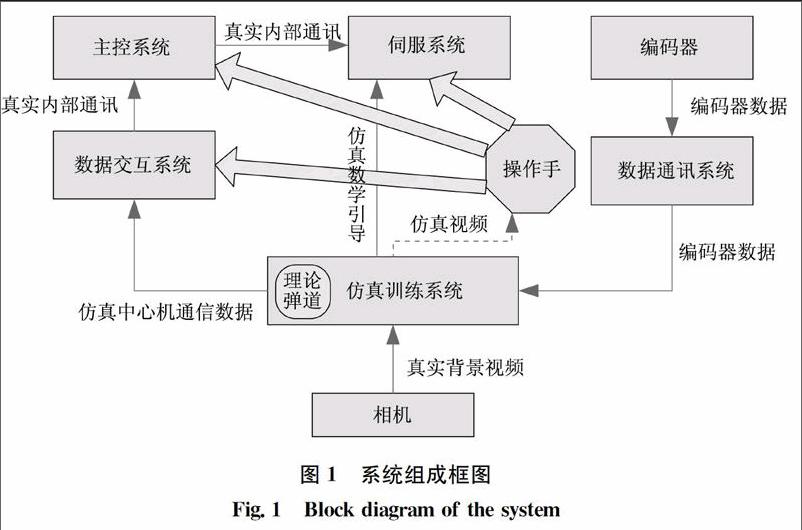
目标仿真训练系统工作原理:首先通过VIO卡实时采集真实背景图像,然后由理论弹道(地心系坐标)获得仿真目标位置信息,与理论弹道(地心系坐标)差分后获得仿真目标近似姿态信息;目标位置信息、目标姿态信息、目标三维模型、经纬仪实时编码器值、经纬仪站址坐标、光学系统参数(焦距)及相机参数(像元数、像元尺寸)参与运算后生成目标靶面投影矩阵数据,采用Unity3D处理生成目标仿真图像,将背景图像与目标图像进行叠加融合,生成合成图像在显示器上直接输出,通过VIO卡实时输出独立的仿真合成图像(PAL或SDI格式);同时根据理论弹道信息生成二路仿真数据,一路仿真中心机通信数据送数据交互计算机,另一路仿真数学引导信息送伺服系统,用于记录仿真训练时各种自动跟踪效果,实时存储训练过程中经纬仪运转数据,用于事后分析。在考核模式下,系统记录所有操作后,对学员关键操作点比对后进行评分。仿真训练系统组成框图如图1所示。
1.2 光电经纬仪目标仿真训练系统软件结构
软件体系是由一定形式的结构化元素构成,包括处理构件、数据构件和连接构件。软件体系结构不仅指定了系统的组织结构和拓扑结构,还显示了系统需求和构成系统的元素之间的对应关系。分层开发是一种重要的体系结构,有着良好的可扩展性,而且在扩充或修改功能时,基本不会破坏原有结构的稳定性。本系统的软件体系结构采用层次式结构,分为三层:用户界面层、业务处理层和数据存储层,各层之间关系如图2所示。
1.3 教学训练考核评估设计
教学训练考核评估软件主要针对学员各种操控技能的训练结果进行考核评估。参加培训的学员可通过训练考核评估软件选择参加考核的項目,选定项目后进入考核流程,然后学员对选定考核项目进行模拟操作,考核过程中可收集记录各学员考核操作信息,并对考核操作信息按照一定评判规则进行实时评分。训练评估分系统是一个对训练结果进行事后分析处理的系统。评估的主要指标包括:平稳程度、误差大小、跟踪段落长短等。这几项指标在评估中需要综合考虑,同时还需要兼顾到弹道的难度,比如加速度,速度等。处理的数据源来自于训练过程中记录的硬盘文件,通过对理论弹道与实际训练时的编码器值进行比较分析得出评估结果[8]。其工作流程如图3所示。
1.3.1弹道难度参数
弹道难度按下式[9]估计:
式中:Adif为方位弹道难度参数;Edif为俯仰弹道难度参数;Dif为弹道难度参数,∈[0,1];N为弹道点数;υan为方位速度;υamax为方位速度最大值;υen为俯仰速度;υemax为俯仰速度最大值;aan为方位加速度;aamax为方位加速度最大值;aen为俯仰加速度;aemax为俯仰加速度最大值。
1.3.2评分机制
操作误差按下式[10]评定:
式中:OperDiff为操作误差参数,∈[0,1];Arm为实际训练方位值;Atm为理论方位值;Erm为实际训练俯仰值;Etm为理论俯仰值。操作误差占整个综合得分权重为0.5。
平稳程度按下式[10]评定:
式中:StatDiff为平稳程度参数,∈[0,1];A,E为实际方位俯仰值。操作误差占整个综合得分权重为0.2。
跟踪长度按下式[10]计算:
式中:LengDiff为跟踪长度参数,LengDiff∈[0,1];Tr为跟踪到目标总时间;T为任务总时间。跟踪长度参数占整个综合得分权重为0.3。
综合打分按下式[10]计算:
式中:Score为综合打分,Score∈[0,100]。
在实际使用过程中,根据评估的侧重点不同,将结合用户使用需求对评分机制与算法进行适当调整。
2 目标仿真训练系统的实现
2.1 关键技术
2.1.1运动目标仿真模型的建立
1)三维飞行目标建模
本项目用三维造型建模软件建立三维飞行目标模型,然后从三维图形数据文件中读取模型数据并在OpenGL中绘制运动目标[9]。使用3DS MAX 8.0制作了导弹的三维模型,建好后的模型保存为Wavefront(.obj)格式,应用软件读取该格式文件,就会生成一个包括全部节点坐标、材质、纹理坐标和显示列表等元素的数据列表。在OpenGL程序中读取模型参数,并进行重绘,重绘的模型图像可以较好地再现3DS MAX软件所构建的三维模型。
2)飞行轨迹拟合的二次插值算法
读取接收的经纬仪方位及俯仰角数据,进行坐标变换。打开目标航迹文件,读取一条目标航迹数据,依据读取的极坐标数据(距离ρ、方位角α、俯仰角β)变换为相应的直角坐标数据(x、y、z),读取地上面建立的导弹模型数据,根据直角坐标数据定位导弹模型到当前的空间坐标系中。
极坐标转换为直角坐标的公式为:
航迹文本文件中包含的是航迹上一系列的离散的点(点与点的时间间隔可设定)。如果模拟的导弹按这些离散点航迹进行飞行,将会出现抖动现象。为使模拟导弹飞行过程更加逼真,飞行效果更理想,需对这一系列点进行插值,本项目对飞行轨迹的三维坐标采用拉格朗日二次插值算法进行插值,插值后的航迹如图4所示。
具体算法如下:构建空间x坐标的时间函数x=f(t),然后从航迹文件中读取3个插值结点xk-1、xk、xk+1,对应的时刻分别为tk-1、tk、tk+1,构造3个插值基本多项式:
则插值公式为:
程序中对飞行过程的模拟采用循环刷新的方式进行,每次刷新时将当时的飞行时间t代入式(10),则可求出对应的插值点x坐标值P(x)。同理,对y、z坐标采用相同的算法进行插值,可得到相应插值点y坐标值P(y)、z坐标值P(z)。
OpenGL中就可通过函数glTranslatef(x,y,z)来控制目标的空间飞行位置。
2.1.2
3D建模与控制
Unity3D是虚拟现实软件的后起之秀,跟DirectX和OpenGL相比,该软件对图形渲染管道进行了高度的优化,即使是比较低端的硬件,也可以流畅地运行漫游展示、虚拟仿真、交互式动画等等,并能够创造出高质量3D仿真系统和真实视觉效果[11]。并且Unity3D起步就定位为多平台高端大型游戏开发引擎,能够与HTML、Flash等进行良好的交互,并支持C#、JavaScript等多种脚本语言。因此,基于Unity3D进行三维展示、虚拟漫游和仿真已成为当前进行虚拟仿真训练系统开发的首选软件。经过对光电经纬仪的模拟仿真训练控制的深入分析研究,最终采用Unity3D软件实现,编程语言主要通过C#实现,整体框架采用了二维界面控制与三维模型控制叠加结合的方式。光电经纬仪仿真训练的二维界面控制主要就是基于Unity3D中的NGUI控件完成的,编程语言同样选择了C#,主要实现了以下三方面的内容:实现各分系统中的按钮控制、三维模型控制、选项控制及评分。
2.1.3应急排障的实现
本项目“应急排障”模块就是基于LabVIEW可视化编程软件实现的,学员在训练考核时,可根据故障现象选择相应的测试点,根据测试波形分析故障原因,培养学员分析问题解决问题的能力,其中所有科目测试波形即为LabVIEW编程所得。
2.2 目标仿真训练考核系统
光电经纬仪模拟训练考核评估系统是通过设置多种形式的操作科目,训练学员掌握光电设备的各种操控技能。参加培训的学员可通过训练考核评估软件选择参加训练考核的项目,选定项目后进入训练考核流程,学员根据要求对选定的科目进行操作。考核过程中该系统可收集记录各学员训练考核操作的相关信息,并对学员的操作按照一定评判规则进行实时评分。该系统的操作科目主要根据试验靶场光电设备的主要操作而设置的,学员通过科目训练,可以有效训练士官学员的操作能力,为学员后续岗位任职打下良好的技术基础。
操作科目主要分为设备操作、指标测试、维护保养、应急排障和任务流程演练五大模块,近40个操作科目。基本涵盖了光电测量人员在试验任务中保持设备工作状态和圆满完成任务的基本内容。每一个操作科目都包含操作要求、操作要点和操作时间等内容。同时,为了更好地服务教学,增加学员学习的积极性,为科目配备了相关学习视频和三维动画演示操作。
该系统在Windows 7中文版操作系统环境中,采用Visual C++ 6.0、UG、Eduis、Unity3D、VS2010、DirectX 3D编程,应用LabVIEW 2012和数据库等技术,模块化编程,建立图形化人机交互界面,充分考虑到可扩充性及可维护性。该系统支持以管理员和学员两种身份进行登陆:管理员可以根据试验任务模式和设备更新实时对操作科目进行添加、删除和修改,使操作科目能够贴近部队,贴近实战;学员依据操作科目进行训练和自我考核。该系统考核模式共分为训练和考核两种模式:训练模式主要用于学员进行训练,查找不足和问题;考核模式下,系统具有自动组卷、指定考题、打印试卷和评分表等功能。
3 单杆跟踪实例
在光电设备参加试验任务过程中,设备操作手利用单杆对目标进行捕获跟踪。单杆半自动跟踪是一种非常重要的跟踪方式,操作手需要通过日常的跟踪训练,提高操作技能和应急处置能力,锻炼自己的心理素质,以便在任务实施中,能够迅速捕获和稳定跟踪被测目标。为了查找不足,提高操作水平,操作手在训练过程中,需要对每一次的训练进行考核评估,认真查找训练中存在的不足,总结跟踪经验,修改跟踪策略,逐步地提高自身的操作能力。
单杆半自动跟踪要求操作手能够迅速捕获目标,然后利用操作单杆对目标进行平稳跟踪,并且尽量使目标成像在视场中心。因此,在考核评估这个环节,重点考察操作手捕获目标的灵敏程度、跟踪目标的平稳性和目标是否在视场中心。
此次模拟弹道包括目标起飞和拐弯等关键事件。以下对某学员一次训练情况进行考核评估,按照评分规则,系统给出最后得分为70.3,评估结果为此学员在目标轨迹突然变化时跟踪不平稳。图5为跟踪画面图,下面我们根据学员跟踪目标的数据进行分析。
1)目标方位跟踪分析
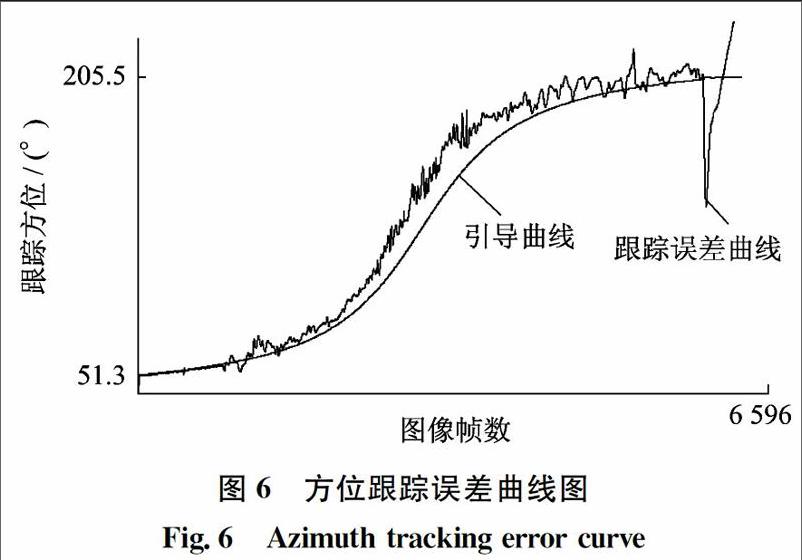
跟踪飞机方位跟踪误差曲线如图6所示,随着目标运动速度增大,其方位角度变化较大,目标脱靶量逐渐变大,说明学员在目标轨迹变化比较剧烈时,跟踪目标不太平稳。
2)跟踪效果评判
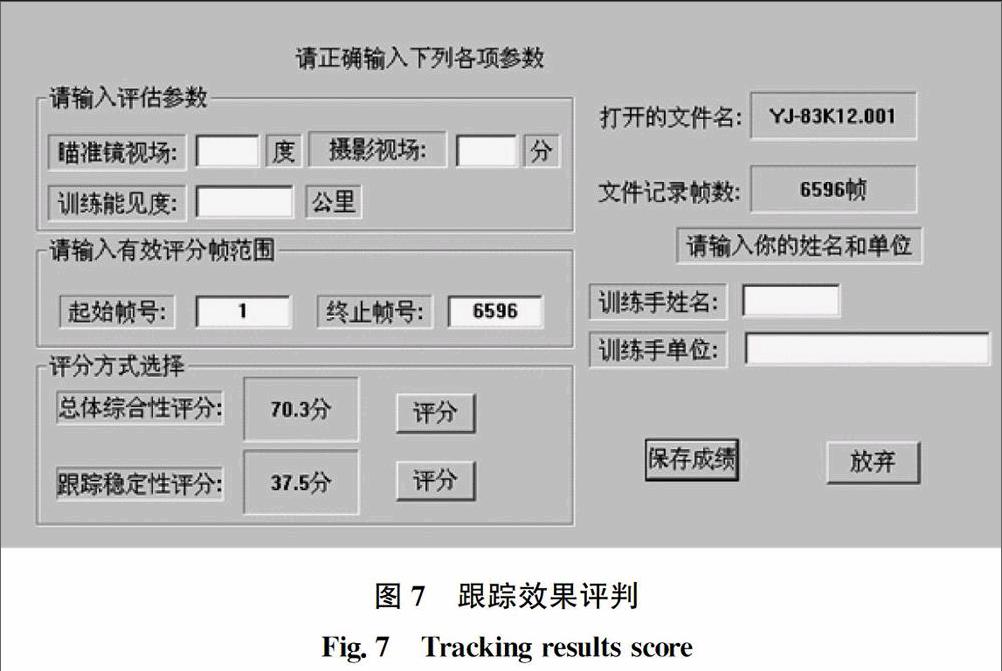
根据学员跟踪的稳定性、跟踪时长及难度进行评分,如图7所示。从数据显示来看,考核评估系统给出学员的考核成绩和训练评估情况是符合学员训练水平的。
4 结束语
设计了一种光电经纬仪目标仿真训练系统。采用虚拟现实技术对目标、背景和弹道进行了建模,综合考虑目标的运动性,包括轨迹、速度、姿态及其相互关系,实现了不同类型目标的逼真模拟;分析了运动目标仿真模型和弹道难度参数,设计了基于运动目标航迹和弹道难度参数的评估模型;利用UG和Unity3D实现了经纬仪重要部件的建模和交互式控制;利用LabVIEW可视化程序语言,实现了故障的再现及排障过程的模拟,解决了部分故障无法复现的难题。
参考文献:
[1] 龚锦龙.光电经纬仪仿真训练系统的设计与实现[D].成都:电子科技大学,2007.
[2] 郑华强.光电经纬仪模拟器的实时视频处理系统研制[D].重庆:重庆大学,2010.
[3] 闫志明,程波,邱揚刚.一种光电经纬仪虚拟目标仿真方法研究[J].计算机仿真,2013,30(2):383387.
[4] 刘亮.某型装备模拟训练系统研究与设计[D].武汉:华中科技大学,2010.
[5] 熊帅.光电经纬仪虚拟现实仿真平台设计及关键技术研究[D].成都:中国科学院研究生院(光电技术研究所),2013.
[6] 王习文.光电经纬仪跟踪飞机的3D计算机视觉研究[D].长春:中国科学院研究生院(长春光学精密机械与物理研究所),2010.
[7] 肖婧.图像跟踪器测试评估系统的虚拟仿真环境研究与实现[D].西安:西安电子科技大学,2009.
[8] 张勇,吴钦章.基于OpenGL的目标序列影像姿态仿真方法研究[J].系统仿真学报,2010,22(2):439442.
[9] 于正林,谭微,姜涛.基于视景仿真的光电经纬仪模拟训练器[J].吉林大学学报(工学版),2011,41(2):509513.
[10] 高策,王成龙.光电经纬仪目标仿真训练分系统[R].中国科学院长春光学精密机械与物理研究所,2014:9193.
[11] 韩意,孙华燕,李迎春,等.基于OpenGL的空间目标图像生成方法[J].计算机仿真,2010,27(6):267270.
猜你喜欢
中国毕业后医学教育(2022年4期)2022-11-29
军事文摘(2022年16期)2022-08-24
军民两用技术与产品(2022年4期)2022-06-28
军事运筹与系统工程(2019年2期)2019-11-16
军事运筹与系统工程(2017年3期)2018-01-23
中国医学装备(2016年6期)2016-12-01
阅读与作文(英语初中版)(2013年3期)2013-04-10