
下一代地铁车辆全自动无人驾驶信号系统关键技术
2017-07-07 13:03翟国锐刘宏伟师秀霞
都市快轨交通 2017年3期
翟国锐, 刘宏伟, 师秀霞
(1. 中车长春轨道客车股份有限公司, 长春 130062; 2. 太原轨道交通发展有限公司, 太原 030000; 3. 浙江众合科技股份有限公司, 杭州 310052)
下一代地铁车辆全自动无人驾驶信号系统关键技术
翟国锐1, 刘宏伟2, 师秀霞3
(1. 中车长春轨道客车股份有限公司, 长春 130062; 2. 太原轨道交通发展有限公司, 太原 030000; 3. 浙江众合科技股份有限公司, 杭州 310052)
结合国内外城市轨道交通的发展需求、自动无人驾驶列车运行控制系统的现状及技术发展战略,参考IEC 62279标准对列车运营自动化等级的分级定义,提出BiTRACON型下一代地铁车辆全自动无人驾驶信号系统解决方案,该系统由综合自动化系统、轨旁控制器、车载控制器、计算机联锁和通信系统等组成,除具备传统的列车驾驶模式外,新增全自动列车自动驾驶模式和蠕动模式,无需工作人员值守,可以进行全自动列车运行控制;并且给出新增驾驶模式和既有驾驶模式之间的转换。BiTRACON系统解决方案相比传统的轨道交通信号系统解决方案,在实现全过程的列车运行安全防护、灵活的运营组织、高效和节能、高度一体化和深度集成等方面有了显著提升。
下一代地铁车辆; 全自动无人驾驶; 驾驶模式: 信号系统
1 研究背景
我国以及世界上一些大城市的轨道交通经过几十年甚至上百年的建设和发展,已经形成了城市轨道交通网,城市轨道交通正在成为市民出行的主要公共交通工具。乘客和运营从安全、舒适、正点高效、运营灵活、绿色节能、降低全生命周期成本等方面对城市轨道交通提出了更高的要求。全自动无人驾驶作为目前城市轨道交通的最先进技术,从上述多维度解决了乘客和运营的需求,是城市轨道交通的发展目标之一。
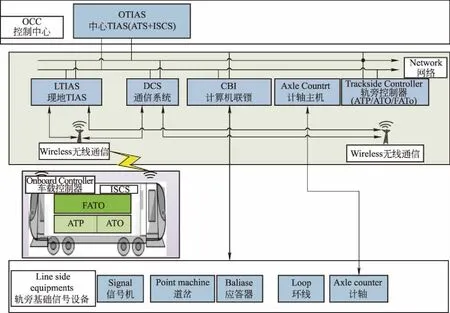
图1 下一代地铁车辆全自动无人驾驶信号系统结构示意Fig.1 The architecture of the UTO signaling system for new generation metro vehicle
法国、德国、英国、丹麦、新加坡等国家先后建成并开通运营全自动无人驾驶地铁线路,我国的台北、香港等城市也早在1996年开通了无人驾驶地铁线路,我国内地的北京、上海等城市也相继进行了全自动无人驾驶线路的规划和设计。截至2016年7月,世界上已经有37座城市的55条地铁线路开通全自动无人驾驶运营系统,运营里程达803 km。据预测,自动化地铁需求年增长达10%,到2025年,世界所有城市中将有2 300 km的地铁线路实现全自动无人驾驶[1]。
CBTC(communication-based train control,基于通信的列车控制)系统是一个连续的自动控制系统,装载了独立于轨道电路的高精度列车定位装置、连续大容量双向车地数字通信系统以及车载与轨旁处理器[2]。随着CBTC系统技术的发展,为了满足城市轨道交通技术储备的国家战略需要及日益增长的全自动无人驾驶系统的需求,国家科技部在2015国家科技支撑计划中立项批复了“下一代地铁车辆技术研究及示范应用”项目,重点研究下一代全自动运行地铁列车新结构、新材料和新能源,列车全自动控制,列车智能在途故障诊断及预警,车地通信和车载网络控制,并达到节能、减重、降噪10%的控制目标[3]。本文提出的全自动无人驾驶信号系统是2015国家科技支撑计划中的一个重要控制系统。
2 全自动无人驾驶信号系统结构
全自动无人驾驶信号系统是下一代地铁车辆的核心安全控制设备,是将列车驾驶员执行的工作实现全自动化、智能处理、高度集中控制的列车控制系统。系统具备列车自动唤醒启动和休眠、自动出入停车场、自动清洗、自动运行、自动停车和自动控制车门上下客等功能[4],即将传统的城轨地铁线路中由列车驾驶员进行的驾驶列车、出车前的启动和检查、对列车运行前方轨道的瞭望、开关车门以及部分项目的开关安全门、启动列车、车辆故障检测和故障排除、与乘客的通信、引导乘客疏散等工作,交由全自动无人驾驶系统进行控制。
全自动无人驾驶系统的关键技术主要包括列车控制技术、监测系统联动技术、故障管理技术及乘客监督和管理技术[5]。列车控制技术包括休眠唤醒、过冲回退、重新开关门、自动出入库、自动洗车、车辆管理和工程车管理等;监测系统联动技术包括障碍物检测、站台门防夹、工作人员防护、烟火报警联动、牵引供电联动等;故障管理技术包括牵引制动故障、门故障处理,远程复位、蠕动模式、列车救援和备份OCC等;乘客监督和管理技术包括乘客紧急手柄/紧急呼叫、逃生门控制等。
下一代地铁车辆全自动无人驾驶信号系统的BiTRACON型系统由综合自动化系统(traffic control integrated automation system,TIAS)、轨旁控制器(含ATP/ATO/FATO(ATP: automatic train protection,列车自动防护;ATO:automatic train operation,列车自动运行; FATO: full automatic train operation,全自动列车自动运行))、车载控制器(含ATP/ATO/FATO)、计算机联锁、计轴、通信系统、轨旁基础设备等组成。图1显示了下一代地铁车辆无人驾驶信号系统的结构。
2.1 综合自动化系统
综合自动化系统以行车指挥为中心,由信号与综合监控、车辆、通信等多系统深度集成,采用统一的硬件平台、软件平台及网络平台,实现列车自动监控、列车计划及调度指挥、电力监控、环境与设备监控等功能,并与火灾报警系统、机电系统、乘客信息系统、广播系统、闭路电视系统等设置接口,减少信息流通环节,以最优的算法和时间执行异常情况下的综合联动。
2.2 轨旁控制器
轨旁控制器通过计算机联锁提供的轨旁基础信号设备和进路状态信息,结合车载控制器汇报的列车位置,为车载控制器计算移动授权;在唤醒过程中,通过计算列车位置,给出允许唤醒授权和静态、动态测试授权,同时,轨旁控制器还可实现线路数据的管理,对轨道数据库及全线的临时限速进行处理。
2.3 车载控制器
车载控制器采用车头、车尾两端二乘二取二的安全计算机平台,实现收尾冗余和无扰自动切换。单端车载控制器由列车自动防护ATP,列车自动运行ATO、全自动运行控制FATO组成,当降级到人工控制时,司机显示器采用与车辆一体化的方式进行司机驾驶显示。车载控制器通过轨旁控制器提供的移动授权对列车运行安全进行自动防护,并实现列车的自动发车、自动站停、自动开关门、自动折返等驾驶功能。全自动无人驾驶车载控制器可以实现列车在车辆段/停车场全自动运行,包括自动唤醒、自动休眠、全自动调车、自动出入库、自动投入和退出运营、自动洗车等;车载控制器可以响应来自TIAS的调度和运营调整指令。
在异常情况下,车载控制器与轨旁控制器、计算机联锁一起,实现列车的自动调整、车门与站台门对位隔离,以及异常情况下的自动紧急制动和远程控制等。
2.4 计算机联锁
计算机联锁通过与信号机、转辙机、环线控制器、计轴、站台门控制器等轨旁设备以及TIAS连接,实现传统的联锁功能,并通过与轨旁控制器的接口,为其提供轨旁设备及进路状态信息,并与其协作实现全自动无人驾驶下的保护区段、进路方向、站台门隔离、工作人员防护、紧急停车、扣车等功能。
全自动无人驾驶系统实现了全过程的列车自动驾驶和安全防护,计算机联锁系统的车辆段/停车场也作为正线的延伸,为列车自动控制提供轨旁设备及进路状态信息。
2.5 通信系统
由于列车运行由系统自动控制和控制中心远程监控实现,没有司机和司乘人员进行处理,因此,通信系统除了进行信号系统的车地双向数据通信之外,还需要将车辆现场图像、故障信息通过车地通信网络上传至TIAS,并在异常情况下传输TIAS下发的相关联动调度指令。
计轴与轨旁基础设备承担了与传统轨道交通列车运行控制系统相同的功能。
3 全自动无人驾驶系统的运营等级和驾驶模式
3.1 运营等级
IEC 62267将地铁运营的自动化等级(grades of automation,GoA)划分为4级:GoA1(非自动的列车运行防护)、GoA2(半自动列车运行)、GoA3(无人驾驶列车运行)和GoA4(无人值守的列车运行),各运营等级的列车运行控制如表1所示[6]。

表1 各自动化运营等级列车控制
注:UTO:Unattended train operation,无人值守的列车自动运行。
3.2 传统驾驶模式
传统基于CBTC的城市轨道交通列车控制系统已经具备了自动控制列车的启动、加速、巡航、惰性、制动等运行过程,具有以下4种驾驶模式[7]。
列车自动驾驶模式(ATO mode,AM):司机监控下的列车自动运行模式。司机负责瞭望列车运行前方的轨道情况,并负责发车条件的安全确认,通过人工控制发车启动按钮执行发车,区间和列车进站由列车控制系统自动驾驶列车运行。
受控人工驾驶模式(constraint train operating mode,CM):司机在列车自动防护设备监控下驾驶列车运行。
限制人工驾驶模式(restricted train operating mode,RM):在地面设备故障或未设置地面信息设备的线路,列车按规定限速运行,超速时实施制动,直至停车。
非限制人工驾驶模式(emergency unrestricted train operating mode,EUM):ATP自动防护设备已被切除,车载设备不对列车运行进行监控,司机按照操作规程驾驶列车。
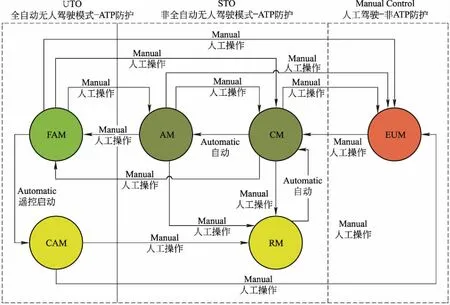
图2 下一代地铁车辆全自动无人驾驶系统驾驶模式转换示意Fig.2 The driving mode transition diagram of the UTO signaling system for new generation metro vehicle
3.3 全自动无人驾驶模式
下一代地铁车辆全自动无人驾驶系统由于无司机驾驶列车,由系统实现对列车的全自动控制,在传统的列车控制系统驾驶模式基础上,还具有如下驾驶模式。
全自动列车自动驾驶模式(full ATO mode,FAM):无司机驾驶的、系统智能控制的列车自动运行模式。相对于AM模式,无需司机进行发车确认操作和瞭望列车运行前方的轨道情况,由系统实现全自动列车驾驶。
蠕动模式(creep automatic train operating mode,CAM):对于正线区间运行的列车,当ATO与TCMS(train control and management system,列车控制管理系统)通信故障不能进行全自动驾驶列车运行时,由控制中心行车调度员人工远程确认通信正常、列车其他设备正常,并通过调度员遥控启动列车,以限制速度(如不超过20 km/h)运行的驾驶模式。
下一代地铁车辆全自动无人驾驶系统根据系统工作状态及人工操作,可以在所提供的6种驾驶模式之间进行人工或自动转换。图2所示为下一代地铁车辆全自动无人驾驶系统驾驶模式转换关系。
4 全自动无人驾驶信号系统的设计提升
传统的轨道交通信号系统通常由列车运行自动控制系统和车辆段信号控制系统两大部分组成[8],一般在城市轨道交通正线实现自动驾驶和安全防护;运营计划确定后,受司机配置和系统维护、监控的影响,运营时间为日间,遇到临时的集会等大客流情况时,往往靠限流实现乘客管理;系统开关门由司机和站台人员确认后操作,人工确认和系统执行延时,开关门时间达16~20 s[9],影响运行效率;信号系统的列车自动监控与综合监控系统独立设计,由不同专业实现系统管理,在异常情况不能实现自动联动,需人工交互信息进行处理。
下一代地铁车辆全自动无人驾驶信号系统的设计采用高度一体化和深度集成的系统方案,实现全过程的列车运行安全防护,提升运营组织的灵活性,实现列车运行节能,相比于传统的轨道交通信号系统,全自动无人驾驶信号系统运行更加高效和节能。
4.1 实现全过程的列车运行安全防护
对下一代地铁车辆全自动无人驾驶信号系统的安全防护范围进行了外延,除了满足正线上的列车运行进路防护、间隔防护、速度防护外,还实现了车辆段/停车场的自动运行和安全防护,列车运行的空间范围从正线扩展到了包括车辆段/停车场在内的列车运行全过程。
下一代地铁车辆加装脱轨和障碍物检测设备,实现轨道侵入障碍物检测功能和脱轨检测功能,并在工作区域设置人员防护开关,对工作人员的安全进行防护;同时,全自动无人驾驶信号系统还需要对设备状态、环境状态进行检测,并在设备或环境发生异常时进行自动联动处理,或由调度人员进行远程遥控处理。
据不完全统计,传统的城市轨道交通线路中有50%~60%的意外事件是由于人的疏忽造成的[10]。下一代地铁车辆全自动无人驾驶信号系统实现了智能化的全自动控制和联动,减少了人为误操作发生的可能,提升了系统的整体安全。
4.2 提升运营组织的灵活性
下一代地铁车辆全自动无人驾驶信号系统无需每列车配置司机,将司机从长时间在风景单一枯燥的轨道交通线路中解脱出来,由系统进行灵活调整运行间隔,根据需要随时可以增、减列车,提高系统对突发的、不可预见的大客流(如体育赛事、大型演出时的人员疏散)的响应能力。
下一代地铁车辆全自动无人驾驶信号系统有助于实现7×24 h不间断的运营服务,实现日间运行和夜间运行等不同的运营组织,使运营组织更加灵活。
4.3 高效和节能
下一代地铁车辆实现系统的全自动无人驾驶和控制,根据线路坡度、曲线、车辆性能以及运营间隔,采用列车运行节能技术,自动计算最优的列车运行曲线并驾驶列车运行,实现列车节能运行。
全自动无人驾驶列车可以实现在进站停车、发车、折返、投入和退出运营过程时,减少司机确认操作和反应时间,仅每个站的开关门确认时间就可节约10 s,在降低车辆配置数量的基础上,提升系统运行间隔,实现列车的高效运行。
4.4 高度一体化和深度集成
下一代地铁车辆全自动无人驾驶信号系统以列车运行为核心,信号与综合监控、车辆、通信等多系统深度集成,提升轨道交通运行系统的整体自动化水平。
控制中心采用综合自动化TIAS系统,可以实现对全线的车辆进行远程控制、状态监控,并能和车上、站台上的乘客进行对讲,提升了乘客服务满意度。
5 结语
下一代地铁车辆全自动无人驾驶信号系统采用先进的计算机技术、控制技术、通信技术、大数据处理技术,实现了系统的高度一体化和深度集成,无需工作人员值守,可以进行全自动的列车运行控制,并能在设备或环境异常情况下,通过智能检测和判断,实现各设备的自动联动,最大限度避免了人为误操作导致的意外事件,提升了系统的安全性和运营组织的灵活性,为今后城市轨道交通控制系统提供了技术方案。
[1] UITP公共交通运输联合会.地铁自动化世界报告[R].布鲁塞尔,2016.
UITP Advancing Public Transport.World Report on Metro Automation[R].Bruxelles, 2016.
[2] 基于通信的列车控制性能和功能需求:IEEE1474.1—2004[S].IEEE标准协会, 2004.
IEEE Standard for communications based train control (CBTC) performance and functional requirements: IEEE 1474.1—2004[S].IEEE Standard Association, 2004.
[3] 中华人民共和国科学技术部.下一代地铁车辆技术研究及示范应用课题任务书[G].北京,2015.
Ministry of Science and Technology of the People’s Republic of China. Support program of technology research and demonstration for new generation metro vehicle[G].Beijing, 2015.
[4] 丁建中.从城市轨道交通无人驾驶系统的特点谈运营管理模式的创新[J].上海电气技术,2010,3(3):48-51.
DING Jianzhong.Discussion on innovation of metro operation management module from features of full automation driverless mass transit system[J].Journal of Shanghai electric technology, 2010, 3(3): 48-51.
[5] 武长海.城市轨道全自动无人驾驶技术应用探讨[J].铁路通信信号工程技术,2016,13(5):54-58.
WU Changhai.Discusses about automatic driverless technologies on mass transit[J].Railway signalling & communication engineering, 2016, 13(5): 54-58.
[6] 自动化城市轨道交通安全需求:IEC 62267—2009[S].国际电工委员会, 2009.
Automated urban guided transport-safety requirements:IEC 62267—2009[S].International Electrotechnical Commission, 2009.
[7] 城市轨道交通CBTC信号系统-ATP子系统规范:CZJS/T0028—2015[S].北京:中国交通运输协会技术装备专业委员会,2015.

[8] 林瑜筠.城市轨道交通信号[M].北京:中国铁道出版社,2008:5-6.
LIN Yuyun.Signaling system on urban mass transit[M].Beijing: China Railway Publishing House, 2008: 5-6.
[9] 沪首条胶轮路轨全自动无人驾驶地铁列车[EB/OL].[2017-01-09]RT轨道交通网, mp.weixin.qq.com/s/jm7gyhxbvzanytrwumdkg.
The first APM system in Shanghai[EB/OL].[2017-01-09]RT Railway Transport network, mp.weixin.qq.com/s/jm7gyhxbvzanytrwumdkg.
[10] 王曰凡.全自动无人驾驶系统:全新理念的城市轨道交通模式[J].城市轨道交通研究,2006(8):1-5.
WANG Yuefan.AUDS-a Brand-new mode for urban mass transit[J].Urban mass transit,2006(8): 1-5.
(编辑:王艳菊)
Key Technologies for Unattended Train Operation Signaling System for New Generation Metro Vehicles
ZHAI Guorui1, LIU Hongwei2, SHI Xiuxia3
(1. CRRC Changchun Railway Vehicles Co., Ltd., Changchun 130062; 2. Taiyuan Rail Transit Development Co., Ltd., Taiyuan 030000; 3. UniTTEC Co., Ltd., Hangzhou 310052)
The paper proposes the BiTRACON system, the unattended train operation signaling system (UTO system) solution, for the new generation metro vehicles by referring to the requirements on mass rail transit and the current development trends of fully automatic unattended train control system as well as the classification of operation levels defined by IEC62279. The BiTRACON system is composed of TIAS, trackside controller, on-board controller, computer-based interlocking (CBI) and data communication system(DCS). Itimposes the full automatic driving mode (FAM) and creep automatic driving mode (CAM)in addition to the traditional train driving mode. In the FAM and CAM modes, the train is operated automatically and unattended. At the same time, the mode transition is described. Compared with the traditional train control system, the BiTRACON system solutionhas made great improvement, which can achieve safety protection for the whole operation time, flexible operation, high efficiency, saving energy, as well as deep and high integration.Keywords: new generation train; unattended train operation(UTO); train operation mode; signal system
10.3969/j.issn.1672-6073.2017.03.015
2017-01-12
2017-01-22
翟国锐,男,硕士,高级工程师,从事地铁电气设计,zhaiguorui@163.com
国家科技支撑计划项目(2015BAG13B00)
U231.6
A
1672-6073(2017)03-0078-05
猜你喜欢
快乐语文(2021年15期)2021-06-15
铁道通信信号(2020年1期)2020-09-21
铁道通信信号(2020年1期)2020-09-21
童话世界(2020年13期)2020-06-15
故事大王(2019年4期)2019-05-14
城市轨道交通(2019年2期)2019-04-04
铁道通信信号(2018年12期)2019-01-31
铁道通信信号(2018年7期)2018-08-29
铁道通信信号(2016年11期)2016-06-01
铁道通信信号(2016年8期)2016-06-01
