
基于前馈控制的交流伺服系统高速定位控制研究
2017-07-07 12:53曹耀文
进出口经理人 2017年6期
关键词:研究
曹耀文
摘 要:前馈控制的交流伺服系统要求高速定位,采用传统PID控制不能满足这一要求。为解决这一问题,可以引入前馈控制来提高定位控制性能。通过进行仿真实验,证明前馈控制可以提高系统对指令信号的跟踪性能,再设计实验系统。
关键词:前馈控制;交流伺服;高度定位;研究
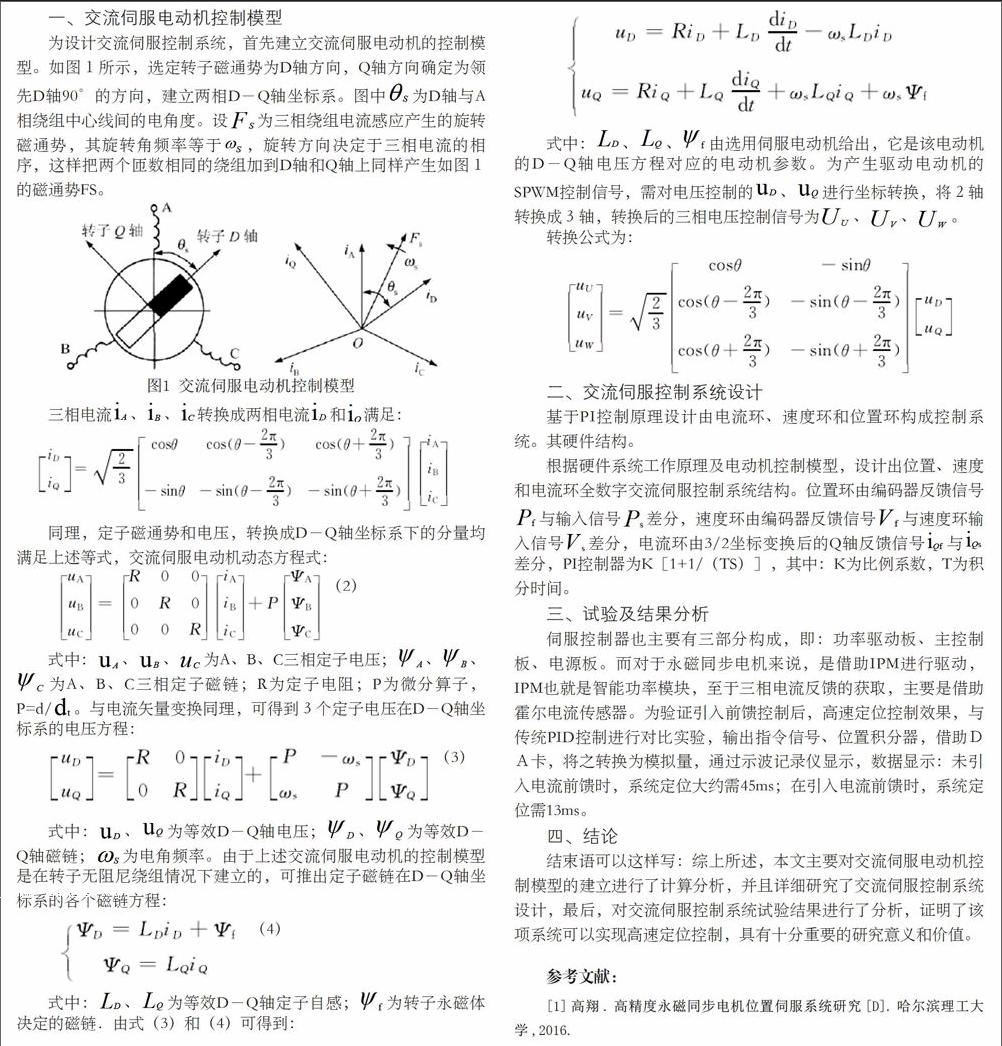
一、交流伺服电动机控制模型
为设计交流伺服控制系统,首先建立交流伺服电动机的控制模型。如图1所示,选定转子磁通势为D轴方向,Q轴方向确定为领先D轴90°的方向,建立两相D-Q轴坐标系。图中为D轴与A相绕组中心线间的电角度。设为三相绕组电流感应产生的旋转磁通势,其旋转角频率等于,旋转方向决定于三相电流的相序,这样把两个匝数相同的绕组加到D轴和Q轴上同样产生如图1的磁通势FS。
二、交流伺服控制系统设计
基于PI控制原理设计由电流环、速度环和位置环构成控制系统。其硬件结构。
根据硬件系统工作原理及电动机控制模型,设计出位置、速度和电流环全数字交流伺服控制系统结构。位置环由编码器反馈信号与输入信号差分,速度环由编码器反馈信号与速度环输入信号差分,电流环由3/2坐標变换后的Q轴反馈信号与差分,PI控制器为K[1+1/(TS)],其中:K为比例系数,T为积分时间。
三、试验及结果分析
伺服控制器也主要有三部分构成,即:功率驱动板、主控制板、电源板。而对于永磁同步电机来说,是借助IPM进行驱动,IPM也就是智能功率模块,至于三相电流反馈的获取,主要是借助霍尔电流传感器。为验证引入前馈控制后,高速定位控制效果,与传统PID控制进行对比实验,输出指令信号、位置积分器,借助DA卡,将之转换为模拟量,通过示波记录仪显示,数据显示:未引入电流前馈时,系统定位大约需45ms;在引入电流前馈时,系统定位需13ms。
四、结论
结束语可以这样写:综上所述,本文主要对交流伺服电动机控制模型的建立进行了计算分析,并且详细研究了交流伺服控制系统设计,最后,对交流伺服控制系统试验结果进行了分析,证明了该项系统可以实现高速定位控制,具有十分重要的研究意义和价值。
参考文献:
[1]高翔.高精度永磁同步电机位置伺服系统研究[D].哈尔滨理工大学,2016.
猜你喜欢
体育科技文献通报(2022年3期)2022-05-23
天津外国语大学学报(2021年3期)2021-08-13
辽金历史与考古(2021年0期)2021-07-29
科技传播(2019年22期)2020-01-14
辽金历史与考古(2019年0期)2020-01-06
民用飞机设计与研究(2019年4期)2019-05-21
电子制作(2018年11期)2018-08-04
汽车工程学报(2017年2期)2017-07-05
国际商务财会(2017年8期)2017-06-21
电子制作(2017年23期)2017-02-02
