无人机免像控技术在地形图测量中的应用
2017-07-05 15:23:16范秀庆
测绘通报 2017年6期
范秀庆
(山东省地矿测绘院,山东 济南 250002)
测绘4.0:拓普康索佳应用方案专栏
无人机免像控技术在地形图测量中的应用
范秀庆
(山东省地矿测绘院,山东 济南 250002)
近年来,无人机免像控技术逐渐在无人机航测中得到应用。本文通过对1∶500比例尺地形图测绘项目的生产试验,对该技术在测绘生产中的作业效率及图形精度作了探讨。
无人机;免像控;作业效率;图形精度
无人机航测近年来得到了测绘行业的广泛应用和认可,但传统航测作业依然存在着很多缺点,如飞行姿态不稳定、相机相幅小、影像畸变差大、重叠度不规则等。如果按照传统航空摄影测量加密方式,不仅需要布设较多的像控点,还会成倍增加像控联测的野外测量工作量。
天狼星无人机航摄系统结合RTK技术,可获取高密度、高精度的航空制图像控点,这种精密定位技术使得像片位置信息实现与地面控制点相同的功能。通过天狼星无人机获取的影像,经过AgiSoft PhotoScan Pro处理软件,能实现每小时800张低空影像的匹配速度。系统自带平差系统,无需借助第三方软件,可自动智能化后处理,一步直接导出DOM、DEM、点云,无需空三加密等流程,可在虚拟采集软件下直接作裸眼3D采集,无需传统立体测图的3D眼镜、手轮、脚盘。这样无需传统的像控和空三加密步骤,便可以得到DLG、DOM、DEM等数据,大大减少了外业测量和测绘产品的生产周期。本文以济南市某地形测量项目为例,对天狼星无人机免像控技术在测绘产品生产中的效率和精度进行探讨。
1 天狼星无人机作业流程
1.1 低空无人机摄影测量系统
低空无人机系统的组成如下:飞行控制系统、低空航摄平台、遥感传感器系统、地面站监控系统、遥控系统、数据处理系统。
该系统采用了高频率、高精度GPS实时差分技术,可利用MAVinci Desktop飞控软件按照项目要求进行航线设计,自动进行航空摄影及航摄数据预处理、空三加密,并生成DEM、DOM和DLG。
1.2 影像处理
将获取的影像数据及POS数据导入数据处理软件Agisoft PhotoScan Pro中,设置好坐标系统、中央子午线、投影方法、数据处理精度,选择生成的产品种类、格式,运行数据处理即可。影像处理分架次处理,产品种类主要有:真正射影像、DEM、密集点云、DSM。利用易拼图(EPT)可对TDOM进行镶嵌和分幅。
1.3 地形图测绘
利用真正射影像和数字高程模型,在EPSD2D绘图软件上生成三维模型数据,数据格式为DSM。在三维模型上进行矢量化,主要有建筑物及构筑物、道路及道路附属设施、河流及桥梁、线杆、路灯、沟坎、地类范围等能够辨认的各类地物。高程数据采集主要从点云中筛选出正确的高程数据,然后展绘到数字线划图中。由于试验区的植被覆盖度较高,严重影响了内业高程数据点的采集,因此在植被覆盖区域采用全站仪实测部分高程数据,作为筛选正确高程数据的参考。
2 试 验
2.1 试验区概况
为满足济南市整体规划需要,对济南市农高区片区进行1∶500地形图低空摄影测量。由于项目工期较紧且项目实施时间正值炎热夏季,为保证产品质量和按期完工,决定采用低空无人机摄影测量方法,尝试采用免像控技术、密集点云、真正射影像与外业检核相结合的办法进行地形图测绘。
试验区地形多为平原和丘陵,东西跨度约6.4 km,南北跨度约5.8 km,西至百王庄村、山东联合大学,北至石马村,东至大范村,南至104国道,面积约13.6 km2(如图1所示)。

图1 试验区范围
2.2 航空摄影情况
试验区形状不够规则,根据无人机每架次航摄时间及有效航摄面积,将试验区科学划分为16个航摄分区。
航线设计:航向重叠度为80%,旁向重叠度为70%,航摄影像地面分辨率为3 cm。
航空摄影自2016年7月15开始,至2016年7月18日结束,共拍摄相片13 540张,相幅大小为4896×3264像素;相机焦距为18 mm,像素大小为4.8 μm;影像清晰、反差适中、色调柔和、色彩平衡。
2.3 影像处理及DLG生产情况
影像处理自2016年7月16开始,至2016年7月20日结束。DLG生产涉及1∶500标准分幅图幅65幅,由8个作业员经培训后在6天内完成全部65幅地形图的内业地形要素及高程点采集工作。
与传统的布设像控点和空三加密测量方法相比,该方法减少了6~8天的工作量。
2.4 地形图精度
地形图精度检查采用GPS RTK(网络模式)采集外业数据,共采集明显地物点、特征点373个(其中平面检查223个点,高程检查150个点),数据采集时RTK为稳定的固定解状态。将检核数据与DLG中对应地物点平面位置坐标数据或高程数据进行统计、比较,计算出DLG平面位置中误差为0.15 m(见表1),高程中误差为0.15 m(见表2),满足设计要求。
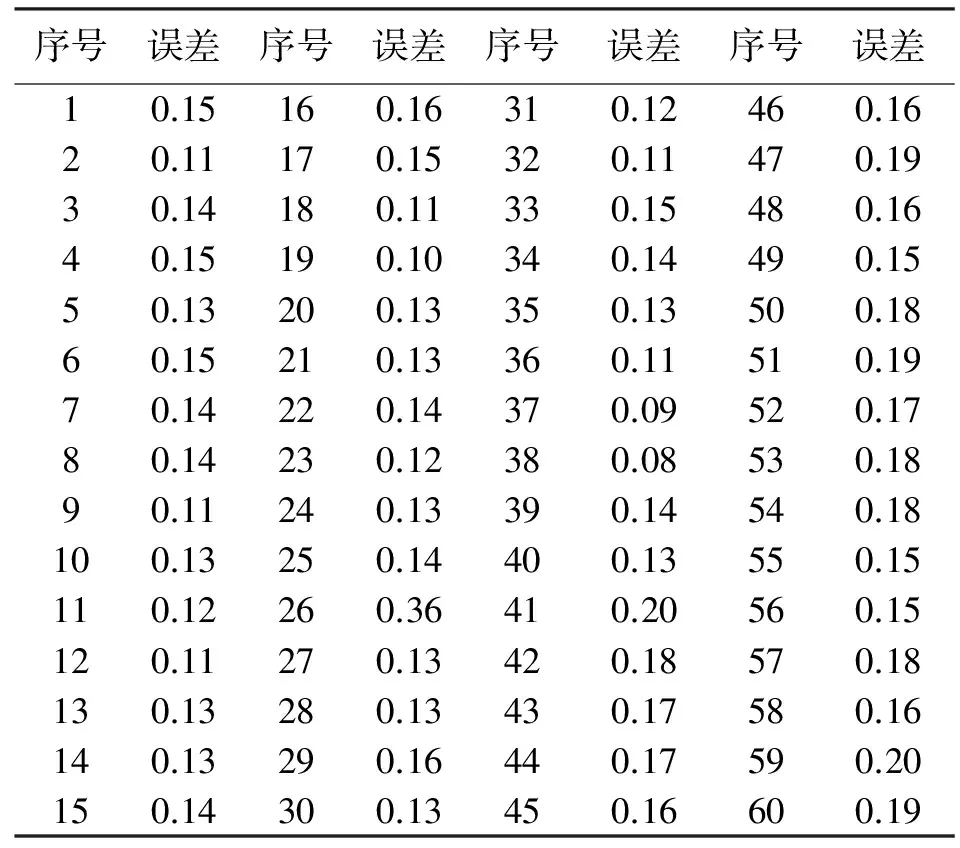
表1 DLG平面精度统计 m
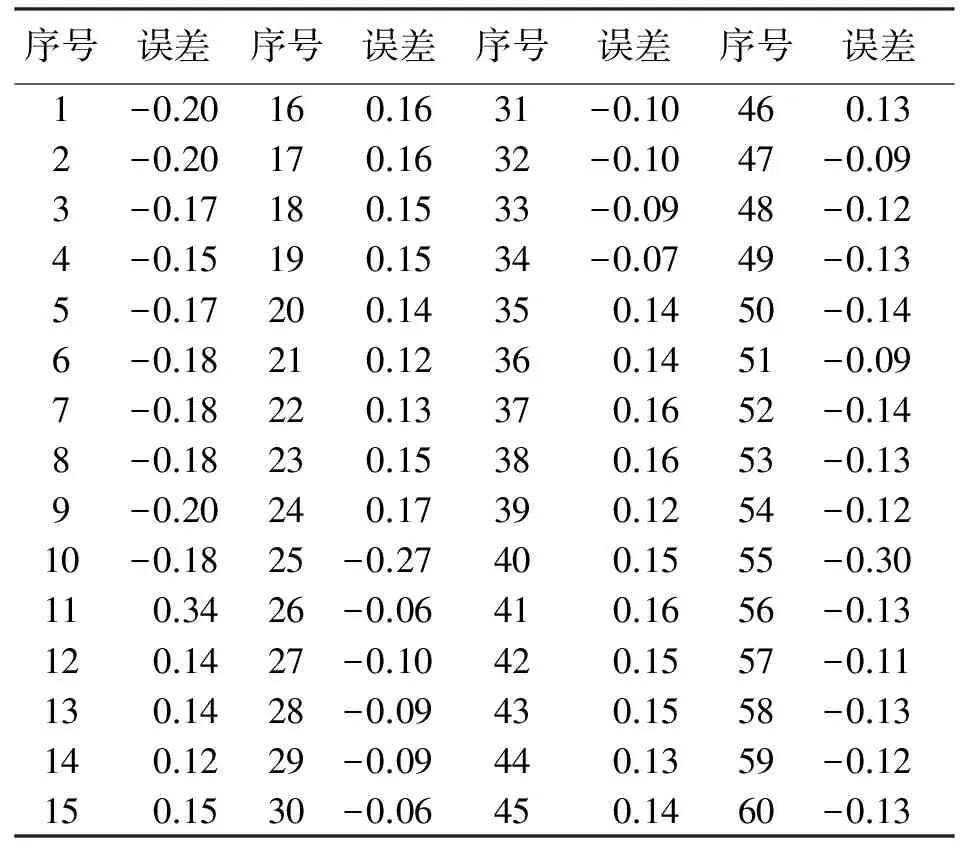
表2 DLG高程精度统计 m
3 结 语
天狼星无人机免像控技术及虚拟测量测图技术的应用使传统摄影测量技术面临着深度变革。免像控技术不仅减少了外业工作人员的工作时间,降低了劳动强度,使生产工期可控,而且可以减少对内业空三人员的依赖,大幅提高了生产效率,缩短了航测生产周期。
由于天狼星无人机最大飞行时间只有50 min,机载相机像素为1600万,使得单架次的航飞面积较小,增加了航飞起落架次,影响了免像控技术在实际生产过程中生产效率的进一步提高,希望以后能在飞行时间和单架次航飞面积上有所突破,进一步提高航测生产效率。
[1] 张祖勋. 摄影测量的信息化与智能化[J]. 测绘地理信息, 2015,40(4):1-5.
[2] 孙艺洋. 虚拟测量在无人机测绘成果中的应用[J]. 测绘通报, 2016(7): 148-149.
[3] 谢建春, 孙丙玉, 李文清,等. 一种低空无人机航摄系统关键技术的实验研究[J]. 测绘通报, 2015(10):85-87.
[4] 朱正荣, 李少龙. 无人机摄影测量用于大比例尺地形图测绘的实践[J]. 测绘标准化, 2014(1):23-26.
[5] 方剑强.生产数字正射影像图(DOM)的若干技术问题探讨[J].测绘与空间地理信息,2007(3):91-93.
[6] 毕凯, 李英成, 丁晓波, 等. 轻小型无人机航摄技术现状及发展趋势[J]. 测绘通报, 2015(3): 27-31,48.
[7] 曹凤海, 宋占武, 李燕, 等. 无人机航摄拍照瞬间精确空间位置的确定[J]. 测绘通报, 2016(6): 144-145.
[8] 狄桂栓, 沈彪群, 高波, 等. 免像控无人机航摄系统在公路带状地形测量中的应用与精度分析[J]. 测绘通报, 2017(2): 159-160.
[9] 黎治坤, 郑史芳, 刘锐, 等. 几种无人机正射影像处理软件的比较[J]. 测绘通报, 2016(6): 82-86.
[10] 贾建华, 张敏, 刘潘,等. 高分辨率无人机低空影像DEM的建立及其精度研究[J]. 测绘科学,2011,36(4):201-202.
[11] 周磊, 梁爽, 李海泉, 等. 无人机航摄系统在复杂地形应用的关键技术实验[J]. 测绘通报, 2017(4): 85-88.
[12] 宫阿都,何孝莹,雷添杰,等.无控制点数据的无人机影像快速处理[J].地球信息科学学报,2010,12(2):255-259.
[13] 袁桂生,智爱玲.数字航摄相机(DMC)在测绘项目中的应用的探讨[J].现代测绘,2005,28(4):30-31.
[14] 王峰,吴云东.无人机遥感平台技术研究与应用[J].遥感信息,2010(2):114-118.
猜你喜欢
当代陕西(2020年23期)2021-01-07 09:24:44
浙江国土资源(2019年10期)2019-10-31 03:17:00
建材发展导向(2019年10期)2019-08-24 06:25:28
北京航空航天大学学报(2017年9期)2017-12-18 07:12:31
中国公共安全(2017年7期)2017-10-13 08:18:11
石家庄铁路职业技术学院学报(2017年4期)2017-05-25 13:26:41
电子制作(2017年9期)2017-04-17 03:01:00
南方文学(2016年3期)2016-06-12 13:54:34
中国房地产业(2016年8期)2016-03-01 01:26:16
兵器知识(2016年2期)2016-01-29 16:45:07