
城市轨道交通类矩形盾构法隧道施工技术研究
2017-06-26 12:39:37刘喜东
城市道桥与防洪 2017年6期
刘喜东
(上海隧道工程股份有限公司,上海市200127)
城市轨道交通类矩形盾构法隧道施工技术研究
刘喜东
(上海隧道工程股份有限公司,上海市200127)
通常盾构法隧道的断面形状均为圆形,其易于实现全断面切削和相对合理的结构受力体系,掩盖了空间利用率低、地下空间占用大的不足。矩形盾构法隧道在断面空间利用率和狭窄道路中的穿行能力上则存在较大优势,但因其结构受力和变形、盾构机推进控制、矩形管片拼装等难题,未能得到有效的发展。系统阐述了城市轨道交通类矩形盾构法隧道技术施工研究,通过分析类矩形盾构法施工上的重难点,分别从类矩形隧道全断面掘削、管片拼装、轴线控制和管控技术等相关技术方面进行研究和探索,为进一步开展矩形盾构法隧道的建设提供更可靠的依据和建议。
类矩形盾构;全断面掘削;管片拼装;轴线控制;管控技术
0 引言
目前,盾构法隧道绝大多数设计为圆形,其主要源于隧道结构受力合理、盾构机设备开挖面切削全面、拼装施工工艺简便等优点,但圆形盾构隧道存在断面空间利用率低的弱点。从盾构法隧道的发展来看,世界上第一条隧道是布鲁诺尔在伦敦泰晤士河下建造的,隧道工程采用的矩形盾构断面为11.3 m×6.7 m[1]。从隧道的使用功能来分析,以矩形断面最为合适、最为经济。矩形断面与圆形断面相比,其有效使用面积比圆形增大20%以上,且可大大减小隧道覆土。此外,在满足相同净空要求的情况下,矩形隧道较圆形隧道所需的覆土厚度小,进而相同坡度的矩形隧道与地面的接线段长度也相应减小[2]。
在国外,日本因其地理空间狭隘和资源匮乏,其对地下空间的开发和利率最为重视。因此,日本在矩形盾构法隧道的研究较为先进。早在1965年~1968年,日本名古屋和东京都使用了4.29 m× 3.09 m的手掘式矩形盾构机。1995年,习志野市使用了4.38 m×3.98 m的D P L E X矩形盾构机[3]。至2009年,三菱重工及大林组等在矩形隧道盾构装备及施工技术方面取得了有效成果,相模纵贯川尻隧道成为应用矩形盾构隧道技术的典型工程。此外,日本还有类似的矩形盾构法隧道设备及工程,如用在京都地铁工程中的“W a gg in g C u tte r S hi el d”工法、国道20号新宿地下步行道工程的7.82 m×4.72 m矩形盾构等[4]。
类矩形盾构法在中国未有成功经验,因此针对类矩形盾构工程特有的类矩形断面形式,考虑隧道沿线周边环境复杂、开挖土层灵敏度高,且具有小曲率转弯半径及含超浅覆土工况等特点,其尚需解决如下技术:解决切削排土和改良、异形断面注浆、异形断面管片拼装、高精度轴线控、隧道稳定控制、隧道对环境影响和隧道综合管控等问题。
矩形盾构法隧道虽在断面形状上有其优势,但在施工中却面临着隧道结构受力变形、盾构推进控制、矩形管片拼装等重难点,必须通过技术研究和工程试验应用加以解决,并最终形成合理可行的矩形盾构法隧道施工技术体系。本文通过分析类矩形盾构法隧道施工上在“推、拼、压”、环境影响和综合管控上的重难点,针对具体工程问题进行研究和探索,重点讨论了土体改良、轴线控制、同步注浆、管片拼装、综合管控和环境影响监测等相关技术方面的探索路径和研究方法,最终根据探索成果形成了类矩形盾构隧道施工推拼压施工技术体系、环境影响控制技术体系和综合管控技术体系。
1 类矩形盾构法施工技术重难点
类矩形隧道的施工难点主要包括以下几个方面:
(1)开挖面稳定难度大。类矩形开挖面的土压力分布型式不明,土仓压力设定难;断面底部呈平底状,渣土流动性差,局部易淤积,而且采用了双螺旋机的出土模式,土仓压力保持难。
(2)管片拼装难度高。类矩形管片的结构外形尺寸特殊,宽11 500 m,高6 937 mm,有10块成环管片和1块中立柱构成;另外,拼装机结构功能特殊、拼装区域空间小,尚无成熟的拼装质量控制标准和拼装工艺以供参考。
(3)轴线控制复杂。类矩形隧道断面的高宽不同,宽高比达1.7,而且管片多达11块,拼装精度控制难,施工中轴线控制复杂;除常规的水平和俯仰纠偏外,类矩形盾构还面临者转角纠偏的问题;另外,自动导向系统需实现转角数据的采集以及左右双线隧道的导向。
(4)施工数据管理难度大。类矩形盾构隧道的施工数据涉及盾构机运行参数、自动导向系统、出土称量系统、盾尾间隙测量系统、周边环境监测和隧道变形监测等众多方面,数据的现场管理难度大;另外,施工数据规模大、种类多、信息关联性强,数据的远程管理复杂。
2 盾构施工关键技术分析与探索
根据矩形隧道的管片和盾构机,结合工程地质、水文和环境条件,研究获取矩形盾构施工地层扰动影响规律和隧道变形规律,完善矩形盾构全断面切削技术、姿态控制技术、管片拼装技术、同步注浆技术和隧道稳定控制技术。
2.1 切削排土改良
由于类矩形断面底部呈平底状,渣土流动性差,局部易产生淤积;刀盘结构、切削方式,以及渣土流动形式特殊;土压力分布型式不明,且不稳定。因此必须对切削排土改良进行针对性研究,配合盾构刀盘切削方式形成新型改良添加剂和改良技术。
根据盾构施工开挖土体的物性条件,在比选了多种不同类型的添加剂后,初步选择泡沫、膨润土和水作为土体改良试验的外加添加剂,借助室内试验(见图1)的抗剪强度、坍落度、流动度和稠度等指标来评价类矩形盾构掘进中土的改良效果,并优化添加剂的配比方案[5]。试验流程见图2。

图1 室内试验

图2 土体改良试验流程图
结合宁波类矩形盾构所穿越地层物理力学性质和工程自身特点,得出了适用于类矩形盾构施工的改良剂配比:泡沫改良剂的浓度为3%,发泡率为12~20倍;聚合物泥浆中聚合物掺量为0.1 k g/m3。
采用全方位、分区域的土体改良技术,解决了矩形盾构土舱底部渣土的流动性不足的问题,实现了开挖面压力的平衡控制。利用盾构机的多点位多方位改良系统、偏心刀盘的搅拌棒和土舱内渣土导流装置,实现渣土有效改良和流动,见图3。
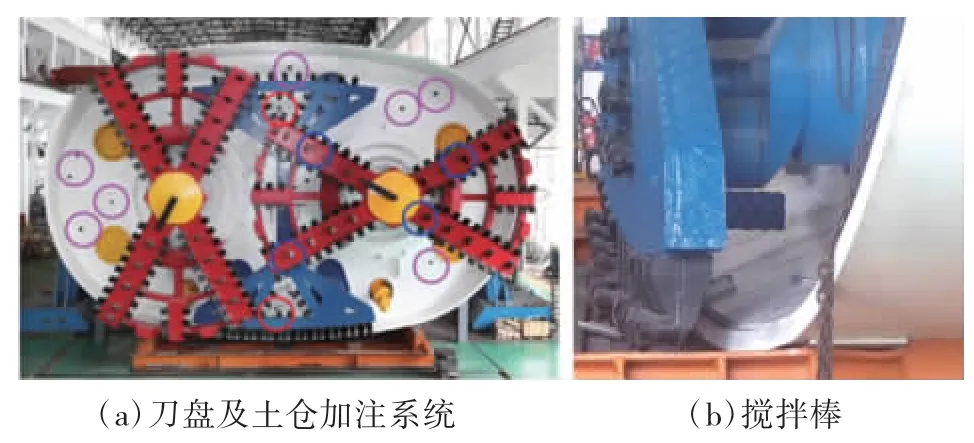
图3 盾构机土体改良系统
2.2 盾构轴线控制
针对类矩形隧道的施工特点,研制盾构姿态自动采集系统,见图4,在提高盾构转角测量精度和频率的同时,可提供左右两条线路各自的盾构姿态;利用图形解析和摄影测量的原理,通过高分辨率的摄像机实时测定盾尾间隙,同时类矩形盾构受到转角影响,管片与盾尾间隙的关系不同于圆盾构,测定盾尾间隙的位置布置需满足实际施工要求。利用安装于盾构车架前部的两台扫描型自动全站仪,完成对已经拼装好的类矩形隧道的实时扫描监测,及时了解隧道的变化情况。

图4 盾构姿态自动采集系统
2.3 管片拼装系统
管片拼装系统是盾构关键子系统之一,直接关系到盾构施工的效率与质量[6]。
双提升臂管片拼装机和单机械臂管片拼装机是管片拼装机的2种主要类型。双提升臂管片拼装机较适用于圆形隧道管片拼装,对于类矩形隧道,因不同管片离拼装机回转中心的距离不等且相差较大,使得双提升臂管片拼装机在有限空间内的布置存在困难。单机械臂管片拼装机具有结构紧凑,管片移送距离长的特点,更适合于类矩形隧道。考虑到类矩形盾构管片自身特点和中立柱的形式,需要设置能抓取单间管片较重且力臂较长的拼装机构,最终确定环臂式自动轨迹控制拼装机,见图5,采用该拼装机易于实现拼装,无需其它辅助机构,在回转轨迹上即可完成中立柱的拼装,且占用空间小,不干涉其它机构的安装。

图5 环臂式自动轨迹控制拼装机
矩形管片拼装在国内尚属首次,为确保施工质量和隧道的稳定性,首先通过管片结构分块分析合理的拼装顺序,然后建立管片拼装的空间三维模型,模拟盾构拼装机管片拼装过程,得出拼装顺序的优选等级,最后通过管片三环水平试拼装、盾构拼装机试拼装、负环管片拼装,得出最合理的拼装顺序。
通过管片拼装技术初期成果,确定管片拼装方式(见图6)。首先拼装T2块C3块、然后依次拼装C2、B1、B2、B3、L、C1,最后拼装T1、L Z、F三块管片。

图6 类矩形管片拼装流程图
2.4 综合管控技术研究
针对类矩形盾构的多元化数据环境和高要求控制,开发集成类矩形盾构信息、外挂控制系统和外部施工数据等多方面数据的综合管控系统,实现数据的实时采集、实时显示、数据记录、数据查询、数据分析及报表生成等功能,并具有远程监控的功能,便于施工的管理,实现信息化指导施工的目标。
综合管控系统主要包括:盾构施工信息管理系统、网络视频监控系统及远程施工软件监控。为满足宁波类矩形盾构管控系统的需求,管控系统总体架构涵盖视频和数据采集两大块内容,见图7,自下而上包含三大层:感知层、网络层、应用层。

图7 管控系统总体架构图
通过管控系统的数据管理计算机或移动终端可查看工地现场实时的施工数据。宁波矩形盾构管控系统为非标定制,选取了注浆和推进等施工中关键的参数在画面中做实时显示,见图8。
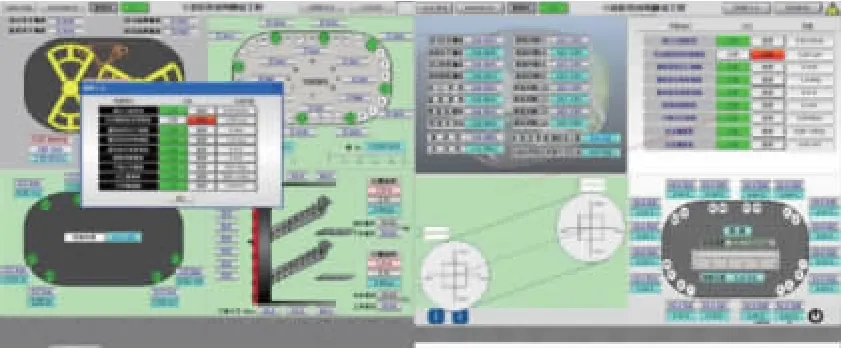
图8 管控系统图
3 工程概况及其应用
宁波轨交4号线部分盾构区间周围房屋众多,有矩形盾构施工需求,为了探索矩形盾构的适用性,研究矩形盾构关键技术,积累施工经验,为后续施工提供安全保障,拟在3号线出入段线进行矩形盾构隧道结构设计、装备研发以及施工综合技术等方面的试验研究,不仅为3号线出入段线矩形盾构的实施提供相关依据,更为4号线建设提供保障。本试验段为类矩形盾构法隧道工程实施区间。工程范围主要包括陈婆渡站部分车站、矩形盾构段区间隧道及其附属结构、明挖段盾构井、U型槽段。区间推进施工采用1台新制的11.83 m×7.27 m类矩形土压平衡盾构,盾构从陈婆渡南端头井始发,最终到达盾构接收井。试验段平面布置见图9。

图9 出入段线类矩形盾构段平面布置图
其中,陈婆渡站为地下两层岛式车站,车站宽度19.2~26.476 m,本工程范围长78.5 m;矩形盾构段长429.3 m,最小平面转弯半径400 m;盾构接收井长18.907 m,宽18.6 m,采用明挖法施工;U型槽段:长约365.093 m,采用明挖法施工。
在施工过程中隧道的变形直接影响到施工的质量,较大的隧道变形将会影响到隧道结构的安全。与单圆相比矩形隧道竖向受力面积更大、单环接头数量更多,其管片受力没有圆形隧道管片那样合理,且受力后呈现的总体性的变形规律更加复杂,所以矩形隧道的变形监测尤为重要。
隧道的变形收敛测点分布:1~80环为每5环布置一组测点,80~215环为每4环布置一组测点,测量使用的仪器为激光测距仪。
从图10可知,正常推进时,隧道的横向、纵向收敛累计变量基本控制在±30 mm以内,说明此次项目的管片构造,螺栓数量合理有效。
从图11和图12可以看出,左右双线切口平面偏差曲线几乎完全重合,但由于盾构机的偏转,双线切口高程偏差曲线并不重合。施工过程中,切口平面偏差均控制在±49 mm之内,而切口高程偏差经过试验段的摸索后,在正常推进段均能保持在±44 mm之内,切口平面和高程偏差量均满足相关设计和标准的要求,现有姿态控制方法和施工水平完全满足工程需求。

图10 隧道收敛变形曲线图

图11 类矩形盾构切口平面偏差曲线图

图12 类矩形盾构切口高程偏差曲线图
4 结语
矩形隧道作为众多断面形状中的一种,已在世界范围内有了一定应用。随着我国城市的发展,市政建设日新月异,它作为城市交通中繁忙陆空的人行通道和电力、通讯等的电缆隧道或合理通道等来说是极为理想的形状。我国针对自身经济社会发展需求,独立自主地开发出类矩形盾构法隧道施工技术体系。经过一年多系统、高效地研发,虽然试验工程尚在进行中,但下列成果已经初步显现,可以对其进一步推广抱以良好的预期:通过室内试验获得适宜的浆液性能和改良配比,结合工程应用验证形成土体改良系统工艺,建立类矩形盾构土体改良技术体系。通过开发类矩形盾构自动导向系统,实现盾尾间隙的自动测量,形成类矩形盾构隧道轴线控制技术。综合采用误差分析有限元计算模型、三维仿真拼装和管片拼装试验等研究手段,获得管片最优拼装工艺,建立管片拼装质量控制体系以及控制标准。通过开发集成类矩形盾构信息、外挂控制系统和外部施工数据等多方面数据的综合管控系统,实现数据的实时采集、实时显示、数据记录、数据查询、数据分析及报表生成等功能,并具有远程监控的功能,便于施工的管理,实现信息化指导施工的目标。
[1]周文波.盾构法隧道施工技术及应用[M].中国:中国建筑工业出版社,2004.
[2]张凤祥,朱合华,傅德明.盾构隧道[M].北京:人民交通出版社,2004.
[3]KOSHIMA Y,KONDO N,INOUE M.Result of experiments usingshield and segment models and applicationof the method in tunnelconstruction [J].Tunneling and Underground Space Technology,1996 11(1).
[4]汪德珍.特殊条件下盾构工程[Z].上海:上海隧道工程股份有限公司技术中心科技情报室,2012.
[5]黄德中.超大直径土压平衡盾构施工土体改良试验研究[J].现代隧道技术,2011(4):65-71.
[6]白云,张冠军,滕丽.大断面矩形地下通道施工设备与技术研究[R].上海:上海隧道工程股份有限公司,2006.
海南保亭、白沙境内高速公路今年年底前将动工开建
为尽快实现海南省第七次党代会“县县通高速”的部署,目前五指山至保亭至海棠湾高速公路、白沙快速出口路两个项目前期工作都在加快推进,确保在今年内全部动工。
其中:五指山至保亭至海棠湾高速公路起点冲山镇顺接中线高速五指山连接线,终点为海棠湾环岛高速藤桥互通,全长58km;白沙快速出口路连接白沙县城与洋万高速儋州互通,全长35km。两项目均采用双向4车道高速公路标准,设计速度100 km/h。
海南省委、省政府对两个项目高度重视。省委书记刘赐贵强调,五指山、保亭、白沙等高速公路连接线今年要全部开工,尽快实现“县县通高速”;代省长沈晓明要求在“五网”基础设施建设中谋划生成和推进项目;省委常委、常务副省长毛超峰近日主持召开省政府专题会议研究项目建设实施方案。
翻开海南地图就可以看到,目前海南各市县除三沙外,只剩下保亭境内还未有高速公路经过,而在建中的琼乐高速和万洋高速也只是分别擦过五指山和白沙一角。
海南省交通运输厅厅长董宪曾说,两条高速路是贯彻落实省第七次党代会报告精神的重大基础设施项目,不仅关乎“县县通高速”的重要目标,而且对促进海南中部地区发展和造福海南百姓具有重大意义。海南省交通运输厅将坚持生态选线,环境保护与投资节约并重,按照“造价服从生态、建设景观路、旅游路、生态路”的原则做好项目设计,推进项目前期工作和组织实施,并及时提交相关报批材料。
目前两个项目有关环境影响评价工作的信息已经公布在海南省交通运输厅网站上,正在征求公众意见。
T D 231.18
B
1009-7716(2017)06-0212-05
10.16799/j.cnki.csdqyfh.2017.06.063
2017-03-27
刘喜东(1980-),男,黑龙江宾县人,工程师,从事隧道施工工作。
猜你喜欢
数学年刊A辑(中文版)(2020年2期)2020-07-25 02:04:36
城市建设理论研究(电子版)(2019年9期)2019-09-16 12:56:24
铁道建筑技术(2019年5期)2019-09-14 08:33:08
中学生数理化·七年级数学人教版(2019年4期)2019-05-20 10:03:44
中学生数理化·八年级数学人教版(2017年4期)2017-07-08 13:04:56
中国房地产业(2016年9期)2016-03-01 01:26:36
工程建设与设计(2016年4期)2016-02-27 10:51:11
工程建设与设计(2016年4期)2016-02-27 10:51:09
中国质量与标准导报(2014年7期)2014-02-28 22:24:36
城市道桥与防洪(2014年6期)2014-02-27 07:27:25
