
基于多传感器的移动小车循墙导航控制
2017-06-23 13:27胡郑希
自动化仪表 2017年6期
胡郑希 ,胡 泊
(1.安徽工业大学电气与信息工程学院,安徽 马鞍山 243000;2.铜陵力图机电科技有限公司,安徽 铜陵 244000)
基于多传感器的移动小车循墙导航控制
胡郑希1,胡 泊2
(1.安徽工业大学电气与信息工程学院,安徽 马鞍山 243000;2.铜陵力图机电科技有限公司,安徽 铜陵 244000)
针对传统单传感器循墙移动小车存在控制精度不高、行走导航不稳定、控制程序算法繁杂的问题,提出了基于光电传感器、超声波传感器及光电测速码盘等多传感器组合的新型移动小车循墙导航控制方法。描述了移动小车系统结构、传感器设置,阐述了超声波传感器、光电传感器和光电测速码盘等的检测分析方法。提出了基于超声波的超误差模糊化算法,并根据超误差模糊化算法设计了相应的控制算法程序。讨论了房间内不同运动环境下各个传感器的工作状态,并由不同的运动环境状态确定了不同的传感器检测信息。利用光电传感器、超声波传感器、光电测速码盘检测信息,构建了室内环境状态的混合模型。结合混合模型制定了对应的控制策略,在该控制策略的作用下,实现了小车在室内各环境状态下的平稳运行。试验结果表明,基于多传感器构建的混合模型实现了移动小车精确、稳定的循墙导航控制,所提出的方法简单可靠、实用性强,具有一定的应用价值。
移动小车;循墙导航控制;多传感器;环境状态;混合模型;控制策略;状态机设计;系统配置
0 引言
循墙移动控制作为一种机器人导航控制方式,其特征在于:在某一封闭的区域内,机器人能够自主判断环境状态并作出相应处理,从而沿墙壁行走,与墙壁保持一定的距离且不发生碰撞。机器人的循墙移动控制作为一种低层次的导航方式,不仅能够方便、快捷地构建未知封闭区域内的移动策略,而且能够配合其他的智能控制方式完成复杂环境下的导航控制[1]。
传统的循墙移动控制采用单传感器进行循墙导航,国内外很多学者采用这种方式对循墙导航进行了研究。Holder[2]提出了一个利用单个旋转声纳传感器的循墙导航算法。由于声纳传感器的发射发散及镜面反射问题,因而传感器返回的距离与实际的距离有较大偏差,循墙试验不够理想。郭小勤等[3]提出了基于红外位置敏感探测器(position sensitive detector,PSD)的移动机器人循墙导航控制方法,能够识别大多数的环境模态,但由于其传感器的特性和控制策略问题,单传感器的设计容易造成误识别,试验结果表明其不能实现精准的循墙而行。在控制方法上,王栋耀等[4]采用有限状态机控制方法对机器人循墙导航进行了仿真研究;简伟程等[5]则在循墙导航应用中对遗传规划算法进行了研究。这些控制方法对循墙控制进行了优化,但大多数控制方法结构繁杂,且难以判断特殊环境,不利于实际应用和推广。
本文利用光电传感器、超声波传感器和光电测速码盘的信息集建立了混合模型[6],并制定了基于多传感器移动小车的循墙控制策略。该策略可以对环境状态进行有效判断,解决了基于单传感器的循墙控制不精确和环境判断不准确的问题,简化了控制算法,提高了系统的可靠性和可利用性,保证了移动小车平滑、精确的循墙移动。
1 循墙导航移动小车结构
移动小车长300 mm、宽200 mm、高100 mm,质量约为3 kg;安装有4个E3F-DS30C4型光电传感器、2个US-100型超声波模块和2个光电测速码盘,底盘驱动系统由2个驱动轮、2个从动轮和连接驱动轮从动轮的2个履带组成,驱动轮和从动轮直径为64 mm。移动小车的系统结构如图1所示。
图1 移动小车的系统结构图
图1中:①~④分别为光电传感器1#~光电传感器4#;⑤、⑥分别为超声波传感器1#、超声波传感器2#;⑦、⑧分别为光电码盘1#、光电码盘2#;⑨、⑩分别为左轮驱动电机、右轮驱动电机。
控制器采用ARM公司的STM32F103ZET6作为控制系统的核心,通过控制器的PCA通道产生PWM波经电机驱动模块驱动移动小车两侧的电机,由光电测速码盘检测移动小车的速度。
移动小车控制系统采用自主循墙导航模式,规定以小车前进方向为参考系,墙壁位于小车左侧为左循墙模式,否则为右循墙模式。两种模式都需要采用传感器接收环境信息,从而对环境状态进行判断。控制器接收传感器的信息以进行混合模型构建,并给出相应的执行器控制策略,从而实现混合模型下的导航功能。
2 多传感器的环境检测分析
2.1 超声波传感器
自带温度补偿功能的超声波模块可以检测小车与墙体之间的距离,传感器利用串口在Trig/TX管脚输出0x55/0x50(波特率为9 600 bit/s),通过串口接收距离值/实时温度值。在系统中,超声波模块与小车前进方向成垂直关系,对墙壁距离进行检测。超声波传感器的声波具有镜面反射的特点且呈扇形发射[7],因此采集的数据必须进行处理后才能参与构建循墙导航的混合模型。超声波测距示意图如图2所示。

图2 超声波测距示意图
超声波采集到的距离值数据经过中值滤波算法确定。将某时刻T开始采集的8个值{S1,S2,S3,S4,S5,S6,S7,S8}按冒泡排序的方式重新排列成{Sm1,Sm2,Sm3,Sm4,Sm5,Sm6,Sm7,Sm8},取(Sm4+Sm5)/2作为T时刻超声波采集的距离值S。
偏差集K的算法如下:
KT=ST-ST-ΔT
(1)
式中:KT为T时刻的偏差元素,mm;ST为T时刻滤波后的距离值,mm;ST-ΔT为T-ΔT时刻滤波后的距离值,mm。
偏转集P的算法如下:
(2)
式中:PT为T时刻的偏转元素;VL为光测速码盘测出的左轮速度;VR为光电测速码盘测出的右轮速度。
偏差偏转合成集E的算法如下:
ET=KT×PT
(3)
式中:ET为T时刻的偏差偏转集元素,mm。
小车在循墙直线前进状态下,无论是向左偏转还是向右偏转,理论上偏差集元素和偏转集元素符号相同。偏差偏转合成集元素为正。而超声波传感器在α过大情况下返回的距离值远大于实际值,偏差偏转合成集元素可能为负。偏差偏转集合元素的符号性质可以作为判断超声波返回的距离值是否精确的重要依据。超误差模糊化算法如下:
If((ET-2ΔT≤0) &&(ET-ΔT≤0)&&(ET≤0))
S=ST;
Else
{
If((PT-2ΔT=-1&&PT-ΔT=-1&&PT=-1)|| (PT-2ΔT×PT-ΔT×PT=-1))
//S≫实际值;
清空偏差集K、偏转集P和偏差偏转合成集E;
S值为ERROR。
α<-40°为大概率事件;
If((PT-2ΔT=-1&&PT-ΔT=-1&&PT=-1)|| (PT-2ΔT×PT-ΔT×PT=-1))
//S≫实际值;
清空偏差集K、偏转集P和偏差偏转合成集E;
S值为ERROR。
α>40°为大概率事件;
}
程序中:S为实际距离,mm。
2.2 光电传感器
分别位于小车前左、前右(小车前进方向为前)、左侧、右侧的4个光电传感器,用于判断墙体周围环境状态。光电传感器检测到障碍物即返回高电平1,没有检测到则返回低电平0,表示该光电传感器延长线方向有墙壁。当检测到墙壁状态时会造成小车响应时间过短无法及时纠正循墙动作,检测距离设置过长会造成较高几率的状态误识别,同时影响超声波传感器的状态检测。经过试验分析,最佳距离为300 mm。
2.3 光电测速码盘
100线的光电测速码盘配合红外对管使用,可确定小车的相对状态。小车循迹过程中将在红外对管的输出端产生脉冲,控制器统计脉冲数可得到速度V。
V=πnR/(50×T)
(4)
式中:T为采样周期,s;n为1个周期内的脉冲数;R为光电测速码盘的半径,mm。
3 多传感器的混合模型构建
3.1 室内小车移动状态
混合模型的构建基于小车室内循墙导航过程所遇到的各种情况,室内环境状态是可以穷举的,通过对室内各种环境状态的分析,可以对传感器的综合信号构建一个基于多传感器的混合模型。不考虑不规则障碍物的室内状态,将小车在一般移动环境状态简单地抽象为丢墙(无墙)、直线墙、内墙角、外墙角、房间门、碰撞墙壁6种状态。小车移动情况如图3所示。
图3 小车移动示意图
3.2 混合模型构建
混合模型的构建有助于精确判断小车目前所处的环境状态[9-10]。小车在不同室内环境状态下的各传感器处理后的数据如表1所示。
表1中:ERROR为超声波传感器在超误差模糊化算法下测量的错误信息;S为超误差模糊化算法下小车与墙面的实际距离。依据表1数据构建出右循墙模式下混合模型。将丢墙(无墙)环境状态规定为寻墙模型。
表1 各传感器处理后的数据
由于受控制策略和检测分析的影响,小车实际上在平行于墙的直线上来回震荡前进,结合超声波模块测量分析下的超误差模糊化集,可以将直线墙环境分为直线墙正常状态、远离状态和接近状态,并以这三种状态规定直线循墙正常模型的模型信息为S。直线墙模型中的直线循墙远离模型,直线墙模型中的直线循墙接近模型的模型信息为“α>40°为大概率事件”。
将内角墙环境状态规定为内墙角模型。
外墙角和房间门的环境状态判断是一个动态过程,需要利用移动小车结合状态机的动作执行对传感器的状态进行采集。将移动小车的初始状态记为P1。若P1状态执行过程中T1时刻各个传感器状态值为表1中外墙角和房间门1的数值,则小车按直线墙下的混合模型继续循墙移动,并将这个状态记为P2。若P2状态执行过程中T2时刻各个传感器状态值为表1中外墙角和房间门2的数值,则控制小车继续向前移动1.5个车身的距离,然后原地向右旋转90°,最后再控制小车向前移动1.5个车身的距离,并将这个状态记为P3。若P3状态执行完毕后T3时刻各个传感器状态值为表1中外墙角和房间门3的数值,则规定这种状态为外墙角模型。
若P3状态执行完毕后T3时刻各个传感器状态值为表1中外墙角和房间门4的数值,则控制小车原地向右旋转90°后再向前移动1.5个车身的距离,并将这个状态记为P4。若P4状态执行完毕后,T4时刻各个传感器状态值为表1中外墙角和房间门5的数值,则规定这种状态为房间门模型。
小车由于控制程序和策略的不完善,会发生碰撞墙壁的小概率事件。碰撞墙壁稳定后,小车的速度为0,即左轮速度和右轮速度都为0,则将这种状态规定为碰墙模型。
4 基于混合模型的循墙导航控制
4.1 循墙移动小车运动控制
循墙前进的特殊行动方式决定了两轮的速度必须尽可能保持一致,这里需要引入速度闭环控制。以设定速度作为闭环控制的给定量,光电测速码盘检测的小车速度作为反馈量,则实际的速度值将稳定在设定速度附近。通过控制小车的左、右轮速度可以实现小车的转向。直线墙环境状态下可以通过差速驱动的方式实现小车的循墙调节,即:
vR=v0+Δv
(5)
vL=v0-Δv
(6)
式中:vR为当前时刻的小车右轮速度,mm/s;vL为当前时刻的小车左轮速度,mm/s;v0为小车上一时刻速度值,mm/s;Δv为小车速度变化值,mm/s。
也可以通过控制左轮前进、右轮后退(左右轮速度绝对值相同)和左轮后退、右轮前进的方式实现小车的原地右转和原地左转。
4.2 混合模型下的控制策略设计
以下控制策略的设计全部基于右循墙模式。
4.2.1 寻墙模型
移动小车在寻墙模型下应控制其向墙壁方向运动。小车控制策略依据光电传感器采集到的环境信息的变化状态机设计,寻墙模型下状态机转换如图4所示。
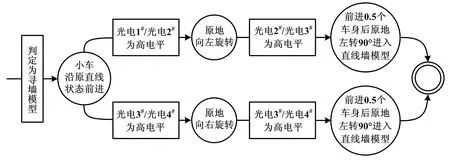
图4 寻墙模型下状态机转换图
4.2.2 直线墙模型
移动小车在直线墙模型下应该控制其平行于墙壁前进,并与墙壁保持一定的距离。由构建的混合模型分析可知,在直线墙模型下可以将小车的状态分为正常直线墙模型、接近直线墙模型和远离直线墙模型。
在正常直线墙模型下,超声波测出小车与墙壁的距离误差不超过5%,反馈值精确。采用距离闭环控制可以有效地控制小车循墙前进。
实际移动过程中小车速度约为1 m/s,所以控制器采用PI(比例积分)控制就可以满足偏差控制需要,具体的控制算法如下。
Error_last=Error;
Error=Distance_set-Distance;
Integral=KI×( Error- Error_last);
If(Integral>Full)
{
Integral=Full
}
V_Error=KP× Error+KI× Integral;
程序中:Error_last为上次的Error ;Error 为设定值与实测值的差;Distance_set 为设定的距离;Distance 为实际测定的距离;Integral为积分部分的值;KI为积分系数;KP为比例系数;Full为积分限幅常数;V_Error为两侧电机速度差值。
在接近直线墙模型和远离直线墙模型下,超声波测得值与墙壁的距离误差较大,由构建的混合模型分析可以得到小车前进方向(长轴)与墙面的夹角α>40°或α<-40°为较大概率事件。
为了能使小车采用正常直线墙模型循墙前进,这种状态下的控制策略为:关闭小车的距离闭环调节,若α>40°为较大概率事件,则原地向左旋转40°后继续采用正常直线墙模型循墙前进;若α<-40°为较大概率事件,则原地向右旋转40°后继续采用正常直线墙模型循墙前进。
4.2.3 内墙角模型
移动小车在内墙角模型下应该避免碰撞到前方墙壁,并迅速转弯以实现小车继续循墙功能。其控制策略为“原地向左旋转90°”。
4.2.4 外墙角和房间门模型
移动小车在内墙角模型下应结合传感器的状态继续循墙前进。本系统中外墙角检测是一个动态过程,外墙角检测的同时也完成了相应的控制。外墙角和房间门的控制策略都由混合模型下的外墙角模型直接给出。
4.3 小车基于混合模型的状态转换
基于多传感器的小车循墙移动控制是指移动小车利用混合模型对环境进行动态判断识别。在寻墙、直线墙、内墙角、外墙角、房间门这几种控制状态机中,控制模型切换的过程(碰撞模型为小概率事件,不考虑)实际为状态机转换过程。混合模型下状态机转换如图5所示。
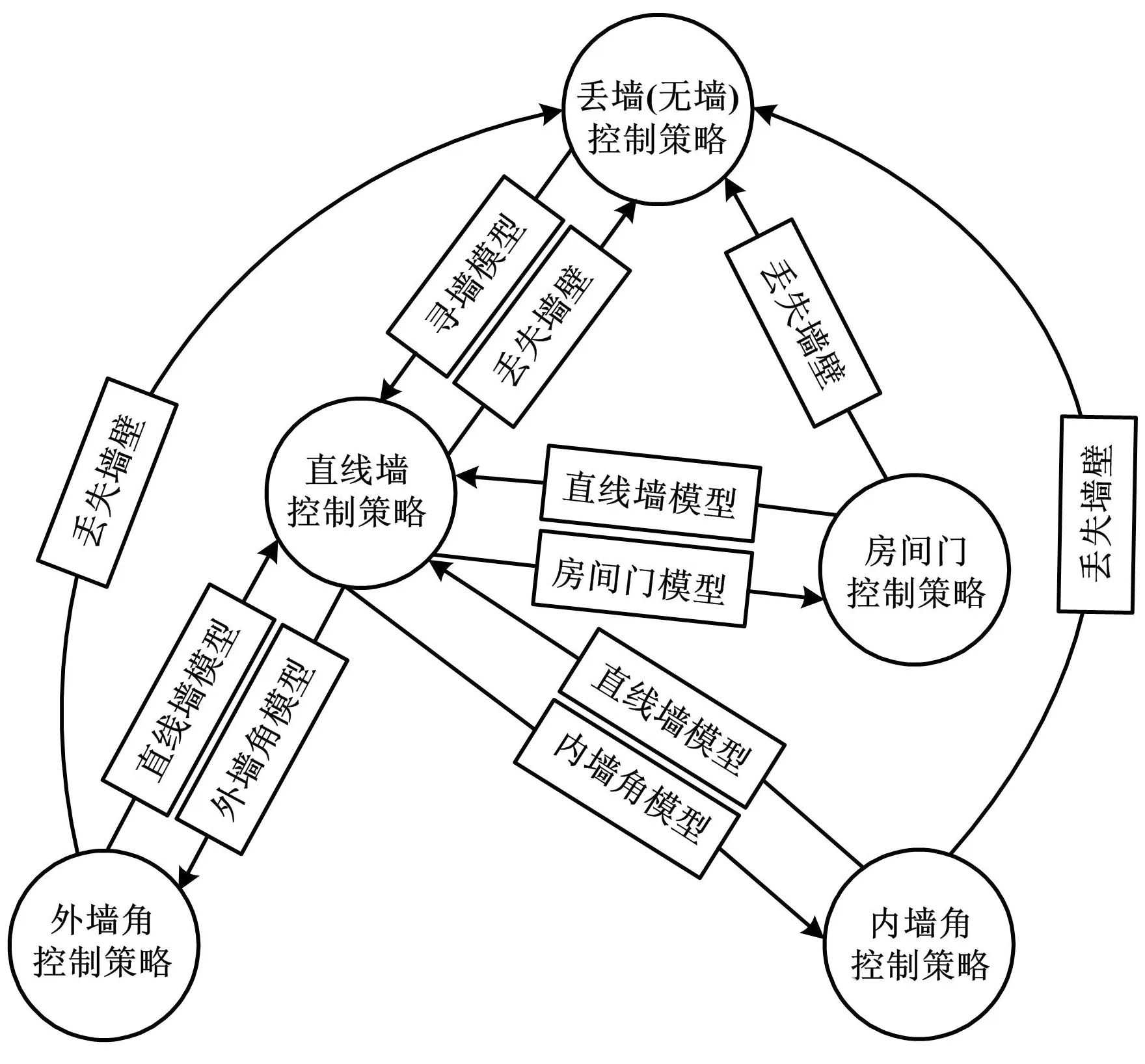
图5 混合模型下状态机转换图
5 试验结果
5.1 系统配置
系统配置如下:四个光电传感器的检测距离为300 mm,直线墙循迹的设定距离为180 mm;速度闭环的PID系数为Pv=10,Iv=0.1,Dv=0.1; 距离闭环的PI系数为PS=21,IS=1;小车标准行进速度为250 mm/s。
5.2 环境设置
根据室内的典型环境,选择了具有以上各种混合模型的模拟环境进行测试。模拟环境长3 m、宽2 m,其中包括大厅1个、房间3个、内墙角18个、外墙角2个、房间门3个。
5.3 试验结果分析
试验中,小车的运动轨迹由摄像头记录,并由计算机提取。
在上述的室内模拟环境下,从移动小车循墙导航的运动轨迹可以看出,通过混合模型控制,小车能够精确地识别各种外部环境,具有很好的跟踪性能。在直线墙环境下,小车能够平行于墙壁平滑地前进;在内墙角、外墙角、房间门环境下,小车转动迅速且基本平滑。在状态切换时,超声波传感器的值会发生比较明显的跃变。在墙体环境发生改变时,循墙稳定性有一定程度的下降。
6 结束语
针对单传感器在循墙导航的过程中存在的问题,研究了基于多传感器的小车循墙移动控制方法,分析了多传感器的环境检测方法,提出了基于超声波的超误差模糊化算法。利用光电传感器、超声波传感器、光电测速码盘检测信息构建室内环境状态的混合模型,并依据混合模型制定了相应的控制策略。
试验结果表明:移动小车循墙导航充分利用了多传感器的优势,小车能够平稳地循墙移动,具有较高的稳定性和可靠性。控制策略以状态机为框架,算法简单可靠,移植性和适用性强。基于多传感器的移动小车循墙导航控制方法,具有较高的应用价值和较广泛的应用范围。
[1] 李磊,叶涛,谭民,等.移动机器人技术研究现状与未来[J].机器人,2002(5):475-480.
[2] HOLDER M B,TRIVEDI M M,MARAPANS S B.Mobile robot navigation bywall following using a rotating ultrasonic scanner[C]//Proceedings of the 13th International Conference on Pattern Recognition,1996.
[3] 郭小勤,陈祝齐.基于红外PSD的移动机器人沿墙导航控制[J].机床与液压,2009(9): 133-136.
[4] 王栋耀,马旭东,戴先中.基于声纳的移动机器人沿墙导航控制[J].机器人,2004,26(4):346-350.
[5] 简伟程.移动机器人自主行为设计的演化方法研究[D].上海:上海交通大学,2002.
[6] 刘金会,郝静如.自主移动机器人导航定位技术研究初探[J].传感器世界,2005(1):23-26.
[7] 舒英利,寇磊,苑全德,等.双超声波数据融合的两轮机器人平衡行进策略研究[J].自动化仪表,2017,38(2):36-40.
[8] 华亮,冯浩,顾菊平,等.基于单超声波传感器的移动机器人沿墙导航策略[J].工程设计学报,2008,15(3):206-212.
[9] 叶涛,陈尔奎,杨国胜,等.全局环境未知时机器人导航和避障的一种新方法[J].机器人,2003(6):516-520.
[10]栾禄祥.室内移动机器人机器视觉定位系统的设计[J].自动化仪表,2017,38(2):49-52.
Wall-Following Navigation Control of Mobile Car Based on Multi-Sensor
HU Zhengxi1,HU Po2
(1.School of Electrical and Information Engineering,Anhui University of Technology,Maanshan 243000,China;2.Tongling Litu Electromechanical Technology Co.,Ltd.,Tongling 244000,China)
For controlling mobile car,the wall following navigation control based on single sensor features low control precision,unstable moving navigation,and complex control algorithm;to against these problems,a new wall following navigation control method based on multi-sensor is proposed,and these sensors include photoelectric sensor,ultrasonic sensor and photoelectric tachometer encoder. The system structure of the mobile car,and sensor setting are described.The detection and analysis methods of ultrasonic sensor,photoelectric sensor and photoelectric tachometer encoder are described.A fuzzy algorithm based on ultrasonic super error is proposed,and according to the fuzzy algorithm of super error,the corresponding control algorithm program is designed.The working states of each sensor in the room under different motion environments are discussed,different sensor detection information is determined by different motion environment states.Based on the detection information of photoelectric sensor,ultrasonic sensor and photoelectric speed detector,a hybrid model of indoor environment states is structured.Combining with the hybrid model,the corresponding control strategy is established,under the effect of the control strategy,the mobile car runs smoothly in each indoor environment state.The test results show that the hybrid model based on multi-sensor can realize accurate and stable wall following navigation control of mobile car,and the proposed method is simple,reliable,and has certain application value.
Mobile car; Wall-following navigation control; Multi-sensor; Environmental state; Hybrid model; Control strategy; State machine design; System configuration
胡郑希(1996—),男,在读本科生,主要从事智能控制方向的研究。E-mail:1787307425@qq.com。 胡泊(通信作者),男,学士,高级工程师,主要从事过程控制方向的研究。E-mail:326167414@qq.com。
TH86;TP24
A
10.16086/j.cnki.issn1000-0380.201706010
修改稿收到日期:2017-03-27
猜你喜欢
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
扬子江(2019年3期)2019-05-24
儿童故事画报·发现号趣味百科(2019年10期)2019-02-02
作文周刊·小学三年级版(2018年36期)2018-12-25
文苑(2018年22期)2018-11-19
小天使·六年级语数英综合(2018年10期)2018-10-15
电子制作(2018年17期)2018-09-28
电子制作(2018年8期)2018-06-26
延河·绿色文学(2017年9期)2018-03-12
