基于MPU6050的电子机械稳定平台设计
2017-06-22 14:42:09黄全振林伟鹏孙清原陈素霞
河南工程学院学报(自然科学版) 2017年2期
黄全振,张 宁,林伟鹏,孙清原,陈素霞
(河南工程学院 电气信息工程学院,河南 郑州 451191)
基于MPU6050的电子机械稳定平台设计
黄全振,张 宁,林伟鹏,孙清原,陈素霞
(河南工程学院 电气信息工程学院,河南 郑州 451191)
稳定平台具有隔离载体扰动、实时保持动态姿态基准的特点,已在许多领域得到了广泛的应用.采用MPU6050姿态传感器,设计了一个三自由度电子机械稳定跟踪平台.采用MPU6050监测平台的姿态变化,姿态控制器根据控制算法输出控制信号,用来控制3个电机转向及转速,电机带动机械传动机构实现稳定平台在X轴、Y轴、Z轴3个自由度方向的移动,从而实现稳定平台姿态基准的稳定.测试与仿真结果表明,稳定平台的控制效果良好,为航空专用精密稳定跟踪平台的开发提供了重要参考.
稳定跟踪平台;姿态传感器;PID控制算法
稳定跟踪平台以实时检测平台姿态和位置变化为手段,通过一系列电子机械传动机构精确保持动态姿态基准,利用图像探测设备实现对移动目标的自动跟踪.由于它有效地隔离了载体本身的扰动,在航空侦查、海底探测、精密设备的检测等领域得到了广泛的应用[1-3].
目前,稳定平台的姿态测量以陀螺仪为主,如文献[4]采用两个单轴陀螺和一个水平陀螺仪实现了航空相机稳定平台系统的设计;文献[5]以电子机械三轴角速率陀螺、线加速度计和磁阻传感器为基础,设计了一套低成本的低空遥感小型三轴陀螺稳定平台;文献[6]设计了一个两轴两框架结构的红外相机稳定平台并进行了模态分析.稳定平台在实际应用场合中经常受到外界环境的干扰,系统性能下降,如何提高抗干扰能力成为稳定平台精度的关键.许多学者将现代控制算法应用到稳定平台的控制中,如文献[7]为了解决非线性因素对稳定平台控制系统性能的影响,提出了一种自适应模糊-PID复合控制方法;文献[8]为了进一步提高光电稳定侦查平台的抗干扰能力,提出了一种基于扰动频率自适应的自抗扰控制新方法.上述控制方法虽然有效提高了稳定平台的抗干扰性能,但控制算法复杂、计算量大,很难在成本较低的单片机控制系统中实现.
稳定跟踪平台在航空拍摄、机载目标跟踪和海底声呐探测等领域的应用相当广泛,故采用MPU6050为姿态传感元件、STM32单片机为主控芯片,设计一个三自由度电子稳定平台,该平台具有体积小、精度高、成本低、自主稳定等特点.试验测试表明,稳定平台的转向角测量精度可达1°,俯仰角和横滚角可达0.1°,机械控制精度优于0.1°,快速响应时间小于20 ms.
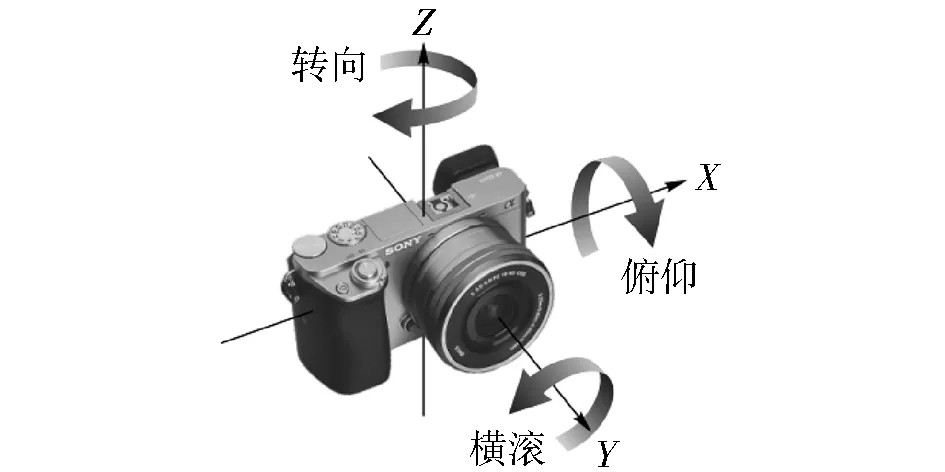
图1 相机三维立体图Fig.1 Camera 3D stereogram
1 设计原理
由于图像采集技术的飞速发展,相机的防抖功能在不断完善,从机械传动机构到图像的合成过程、从硬件的防抖到软件的防抖,均取得了较大的进步.若将相机抖动机制分解成三维立体图(见图1),相机拍摄质量干扰主要是由X轴、Y轴、Z轴方向位移偏差引起的.
稳定跟踪平台的构建思路类似于相机三维消抖结构,试图在俯仰(X轴)、横滚(Y轴)和转向(Z轴)方向上运动,使平台上携带的设备在地理坐标系上保持稳定,以消除由平台载机引起的相移.精确跟踪平台的稳定性取决于机械精准顺滑度、机构转向电机精度、运动姿态传感器灵敏度和较好的反馈控制算法等.
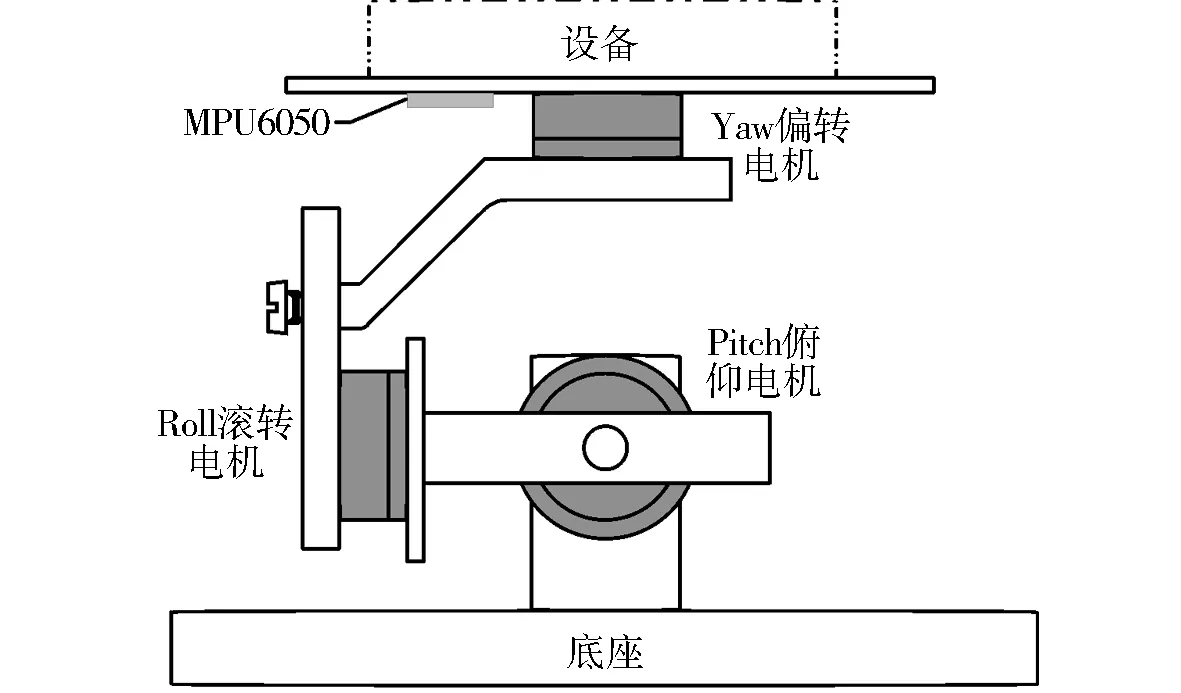
图2 稳定平台的结构Fig.2 The structure diagram of stable platform
2 稳定跟踪平台系统的设计
2.1 稳定平台的结构
稳定平台大致由载机底座、3个机构转动无刷电机、重力加速度陀螺仪传感器MPU6050、摄像设备和相关驱动机构组成,结构如图2所示.
安装在平台上的MPU6050姿态传感器感测平台的运动,将载体姿态的变化实时地传送给控制器模块,控制器依据控制算法输出控制信号,控制3个电机的转向及转速,电机带动传动机构实现跟踪平台在X轴、Y轴、Z轴3个自由度方向的移动,从而实现精确稳定平台的跟踪功能.
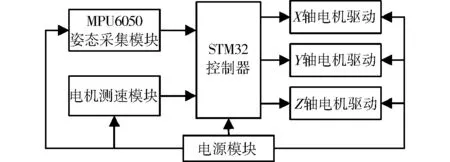
图3 稳定平台控制系统总体框图Fig.3 The overall block diagram of stabilized platform control system
2.2 稳定跟踪平台控制系统
稳定跟踪平台控制系统包含控制器模块、姿态采集模块、电机驱动模块、电机测速模块和电源转换模块,如图3所示.
2.2.1 STM32控制器
本系统采用STM32F103RCT6单片机为主控芯片,它的内核是ARM 32位的CortexTM-M3,最高工作频率为72 MHz,工作电压为2.0~3.6 V,具有256 K字节的闪存程序存储器,可利用外置的纽扣电池实现掉电数据的保存,支持JTAG和SWD调试,含有6个可产生PWM波的定时器,其中的定时器1和定时器8为高级定时器.
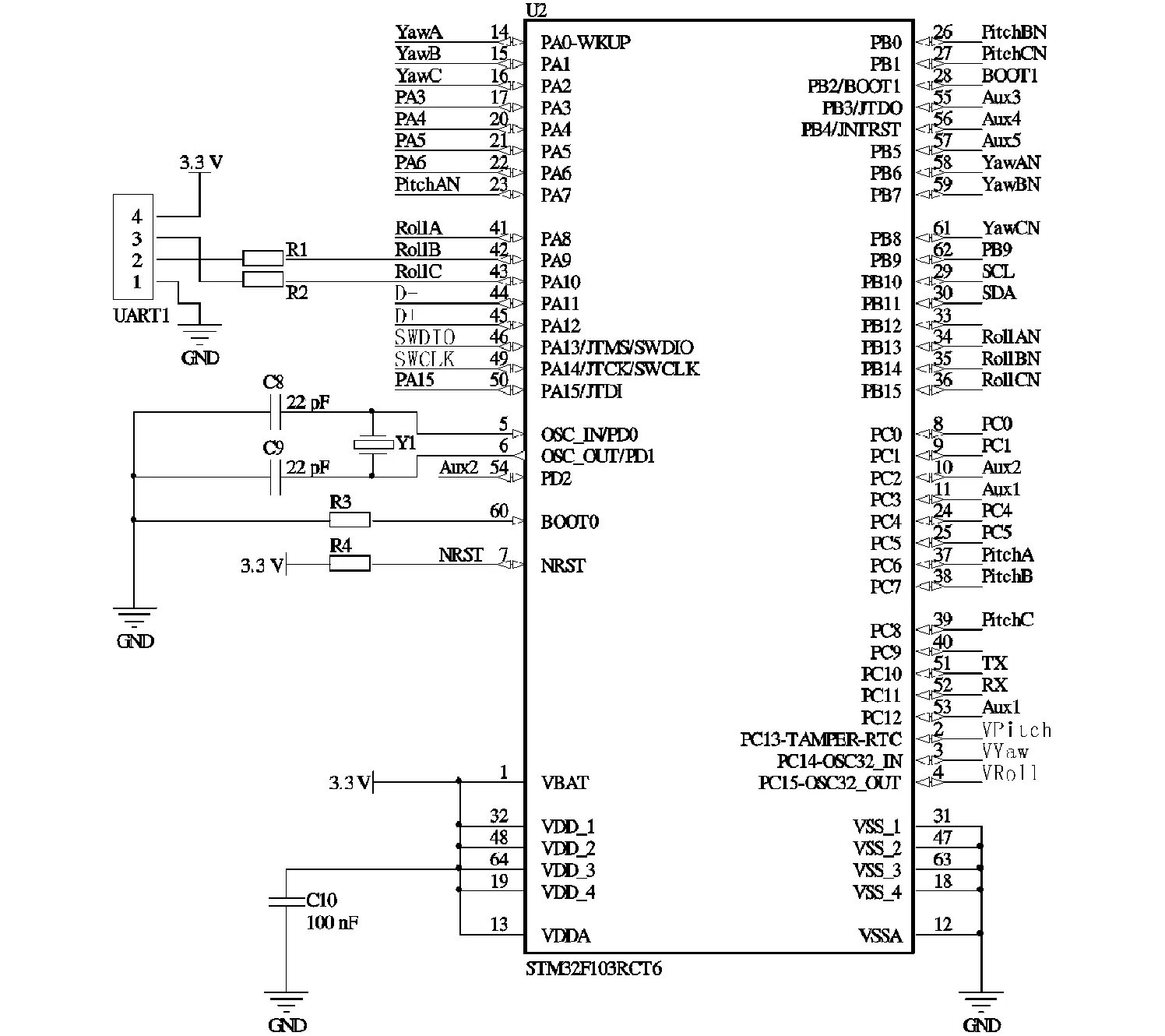
图4 STM32控制器接口电路Fig.4 Interface circuit of STM32 controller
控制器接口电路如图4所示,在PD0和PD1连接8 MHz的外部晶振,由于电机为三相直流无刷电机,控制器针对每一个电机需要连接6个端口,如滚动电机接口为YawA,YawB,YawC,YawAN,YawBN,YawCN,3个电机测速接口分别为VPitch,VYaw,VRoll.
具体控制过程如下:STM32控制器实时接收MPU6050测得的姿态信息,同时进行解析运算,通过控制算法输出PWM控制信号,通过电机驱动调整平台姿态,同时把电机转速反馈给控制器,进一步修正输出信号,最终实现跟踪平台的稳定.
2.2.2 姿态采集模块
姿态采集模块以MPU6050为核心元件,它集成了3轴MEMS陀螺仪和3轴MEMS加速度计,自带数字运动处理功能,减少了MCU复杂的融合演算数据、感测器同步化、姿势感应等负荷,可以直接从DMP寄存器中读出处理结果,具有400 kHz快速模式的I2C接口,角速度全格感测为-250°~250°/s,-500°~500°/s,-1 000°~1 000°/s,-2 000°~2 000°/s,其三维检测轴及旋转方向如图5所示.
MPU6050姿态采集电路如图6所示,芯片检测到的3个轴向的姿态信息通过I2C串口传递给控制器.
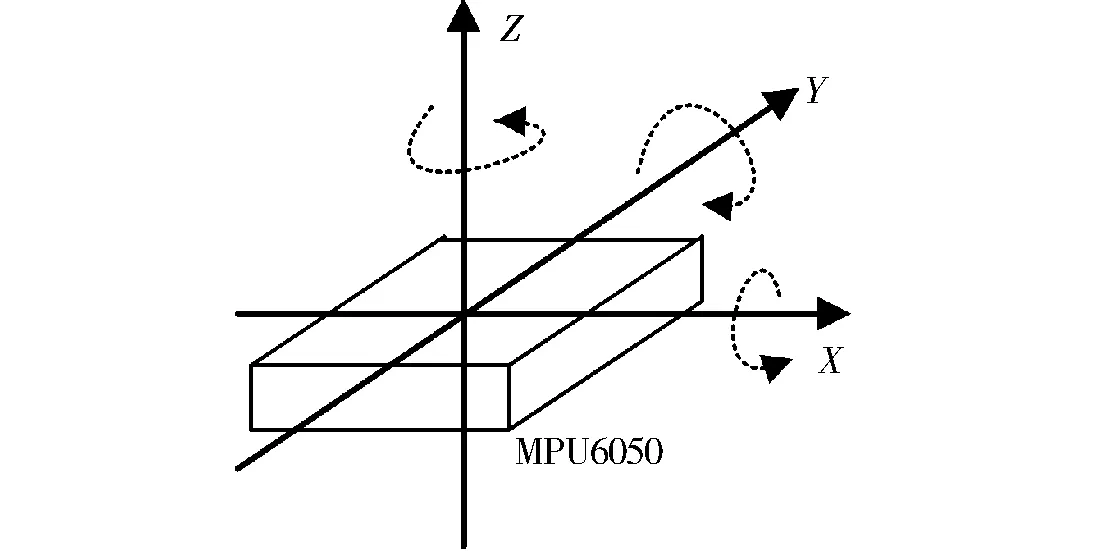
图5 MPU6050三维检测轴及旋转方向Fig.5 Three-dimensional detection of axis and the direction of rotation
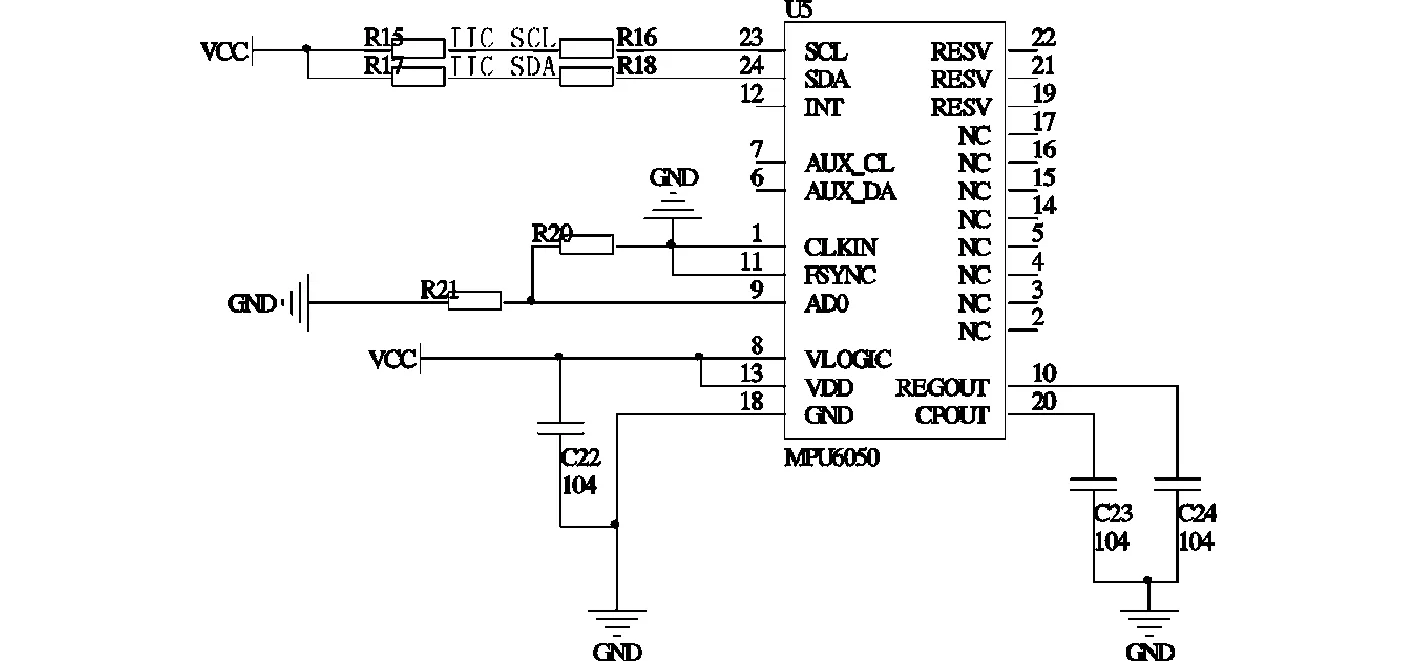
图6 MPU6050电路Fig.6 Schematic circuit diagram of MPU6050
2.2.3 电机驱动模块
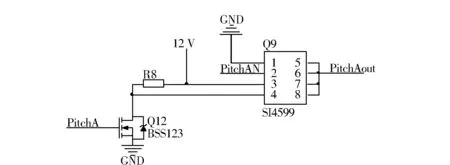
图7 X轴俯视电机的A相驱动电路Fig.7 A phase driver circuit of X-axis overlook motor
由于系统机构的特殊性,3个轴向旋转电机均选用空心轴无刷直流电机,考虑到X轴的仰视电机在平台最底端,需要相对较大的力矩,所以X轴向电机选用2804型号的无刷直流电机,其他两个选用2212型号的电机.电机驱动模块均选用SI4599型号芯片,由于电机均为三相电机,针对一个电机的三相分别使用3个SI4599型号芯片进行驱动.为了驱动3个无刷电机,共需要9个SI4599芯片,以X轴俯视电机的A相驱动电路如图7所示.
当PitchA为高电平、PitchAN为低电平时,PitchAout输出12 V的高电平;当PitchA为低电平、PitchAN为高电平时,PitchAout输出0 V的低电平.通过芯片SI4599的转换,0~3 V的方波转换为0~12 V的方波,实现了驱动能力的增强.
2.2.4 电机测速模块
为了实现跟踪平台的闭环控制,在电机转动机构上安装小型磁钢,采用型号为A3144的霍尔传感器感应磁钢的转动信息,实现电机转速的监测.由于霍尔传感器输出的信号为正弦信号,需要通过LM393电压比较器整形为方波信号,具体电路如图8所示.
2.2.5 电源供电模块
为保证跟踪平台的精确稳定性,对控制系统供电电源的质量要求较高.因此,针对供电电源进行稳压处理,系统电源模块采用3S电池12 V供电,经过78D33转换3.3 V为控制电路供电,另一路经过IRF9328为电机驱动电路提供12 V的电源,稳压电路如图9所示.
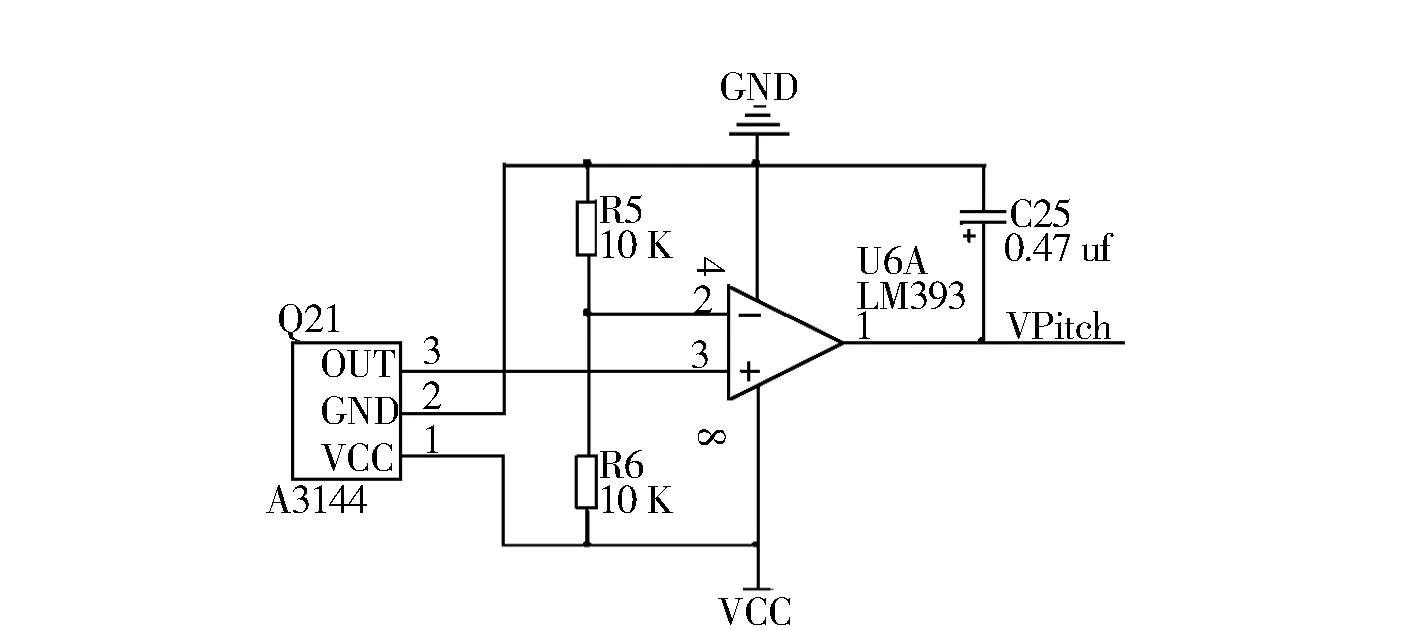
图8 霍尔测速原理Fig.8 Hall speed principle diagram
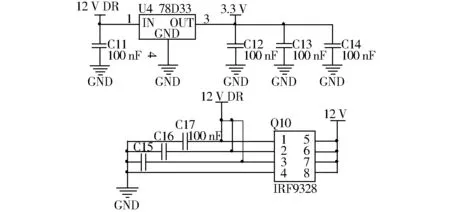
图9 电源整定模块Fig.9 The principle diagram of power setting module
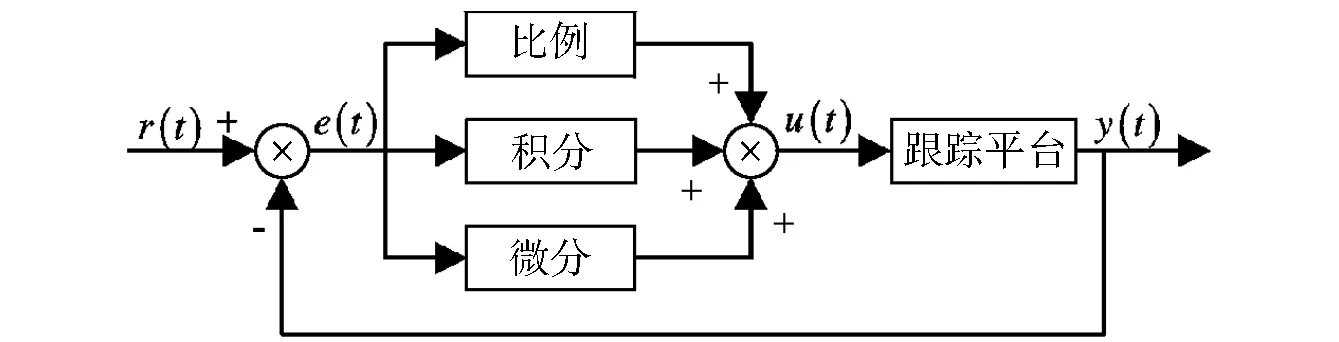
图10 基于PID算法的稳定跟踪平台Fig.10 The principle diagram of power setting module
3 基于PID算法的稳定跟踪平台
跟踪稳定控制平台采用PID算法进行跟踪控制,控制原理如图10所示.
u(t)为控制器的输出(即为电机驱动信号),e(t)为控制器的输入,它跟踪给定值r(t)与稳定平台姿态传感器检测信号y(t)的偏差,即
e(t)=r(t)-y(t) .
(1)
PID的控制量u(t)是由e(t)的比例(P)、积分(I)、微分(D)通过一系列的线性组合而成,即

(2)
其传递函数为

(3)
式中:KP为比例系数;Ti为积分时间常数;Td为微分时间常数.
4 仿真分析与实验验证
控制系统分别针对X轴、Y轴、Z轴采用PID闭环控制算法,PID控制参数选择的原则为系统能迅速、准确、稳定地跟踪平台的姿态变化,利用Ziegler-Nichols方法确定KP,Ti,Td的初始值.由于针对X轴、Y轴、Z轴的控制算法类似,故只阐述针对平台X轴(俯仰角)的控制仿真过程.设定稳定俯仰角为1°,采样时间设置为1 ms,经过不断调整,最终选定KP=3.1,Ti=0.23,Td=0.08.为了测试系统的抗干扰能力,在第800个采样时间加入一个随机干扰信号,仿真测试如图11和图12所示.
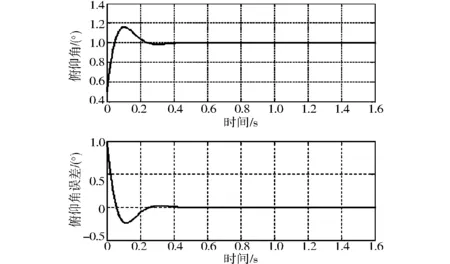
图11 无干扰状态下的PID控制系统Fig.11 The PID control system without interference
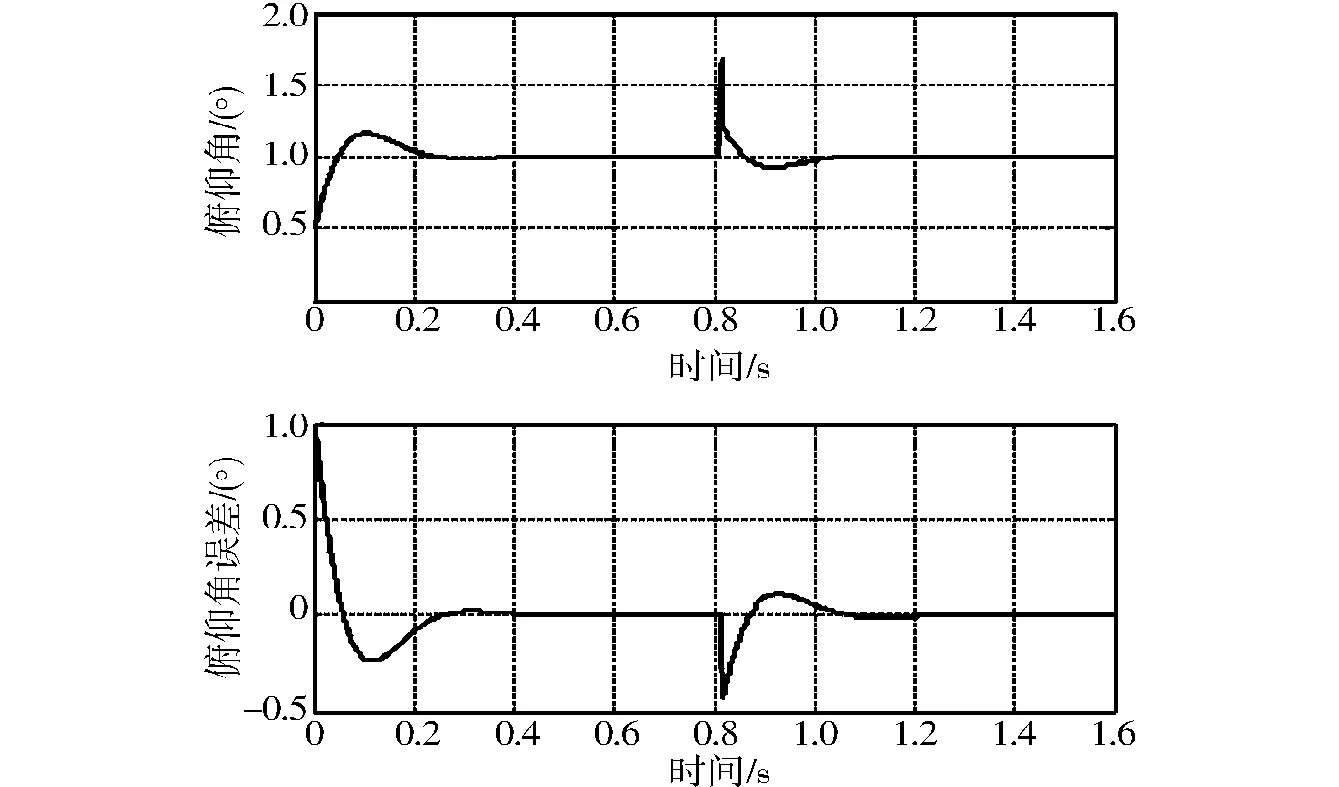
图12 有干扰状态下的PID控制系统Fig.12 The PID control system with interference

图13 电子稳定平台Fig.13 Photos of electronic stability platform
图11为在无干扰状态下的仿真结果.当姿态发生偏离时,系统只需要0.3 s就趋于稳定.根据有干扰状态下的仿真结果(见图12)可知,系统处于稳定状态时,突然出现一个外界扰动信号,系能够统很快恢复稳定.由此可见,控制系统的抗干扰能力强.
依据上述硬件及软件设计,搭建了电子稳定跟踪平台,如图13所示.经过实物测试,稳定平台系统转向角(Z轴)的修正量为0°~360°、横滚角(Y轴)和俯仰角(X轴)的修正量为±45°;转向角的测量精度为1°,俯仰角和横滚角为0.1°,机械控制精度优于0.1°,快速响应时间小于10 ms.
5 结语
以STM32微处理器为核心,设计了一个电子机械稳定跟踪平台,针对系统构架、各重要模块的硬件和软件设计进行了详细的阐述,给出了PID姿态控制算法.然后,通过软件仿真及试验测试,验证了本设计的可行性,为专用航空精密稳定跟踪平台的开发提供了重要的参考.
[1] 王平,张国玉,刘家燕,等.机载光电平台内框架拓扑优化设计[J].机械工程学报,2014,50(13):135-141.
[2] 魏伟,戴明,李嘉全,等.航空光电稳定平台的自抗扰控制系统[J].光学精密工程,2015,23(8):2296-2304.
[3] 周向阳,贾媛.航空遥感惯性稳定平台模糊/PID复合控制[J].仪器仪表学报,2016,37(11):2545-2554.
[4] 侯丹丹,王乐勇,毛武军,等.航空相机稳定平台系统设计[J].机电技术,2013(2):44-47.
[5] 张强,吴云东,张超.低空遥感小型三轴陀螺稳定平台的设计与实现[J].测绘科学技术学报,2012,29(4):276-284.
[6] 李全超,谭淞年,李蕾,等.某红外相机稳定平台框架结构设计与分析[J].红外技术,2016,38(9):728-732.
[7] 朱倚娴,陆源,许江宁.一种陀螺稳定平台自适应模糊-PID复合控制方法[J].中国惯性技术学报,2014,22(3):317-321.
[8] 李贤涛,张葆,孙敬辉,等.航空光电稳定平台扰动频率自适应的自抗扰控制[J].红外与激光工程,2014,43(5):1574-1581.
Design of electron-mechanism stable platform based on MPU6050
HUANG Quanzhen, ZHANG Ning, LIN Weipeng, SUN Qingyuan,CHEN Suxia
(SchoolofElectricalInformationEngineering,HenanUniversityofEngineering,Zhengzhou451191,China)
The stable platform has been widely used in many fields with the characteristics of isolation carrier perturbation, and keeps the dynamic attitude standard from time to time. In this paper, a 3-DOF electro-mechanical stability tracking platform has been designed by the MPU-6050 attitude sensor. Using the attitude change of the MPU-6050 monitor platform, the attitude controller outputs the control signals according to the control algorithm, which is used to control the three motors turning and rotating speed. The motor drives the mechanical transmission mechanism to realize the stable platform in theX,YandZaxis. In order to achieve stable stability of the platform. The simulation and experimental results show that the control effect of the stable platform is good, which provides an important reference value for the development of precise and stable tracking platform for aviation.
stabilization and tracking platform;attitude sensor;PID control algorithm
2016-10-11
国家自然科学基金(61403123);河南省高校科技创新人才支持计划(17HASTIT020);河南省科技攻关项目(162102210099, 172102210205);河南省高等学校青年骨干教师培养计划(2016GGJS153)
黄全振(1979-),男,河南驻马店人,副教授,博士,主要从事先进智能控制方面的研究.
TP237
A
1674-330X(2017)02-0046-05
猜你喜欢
汽车实用技术(2022年7期)2022-04-20 11:45:04
房地产导刊(2020年11期)2020-12-28 01:32:30
学生天地(2020年3期)2020-08-25 09:04:16
铁道通信信号(2019年4期)2019-10-10 03:42:56
汽车观察(2018年9期)2018-10-23 05:46:40
中国自行车(2018年8期)2018-09-26 06:53:44
制造技术与机床(2017年6期)2018-01-19 02:41:07
通信电源技术(2016年1期)2016-04-16 04:57:31
电源技术(2015年9期)2015-06-05 09:36:06
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54