基于PWM的三维大气电场传感器驱动电机的转速控制
2017-06-19 18:50陈晓宁张海涛顾超超
网络安全与数据管理 2017年11期
林 楚,陈晓宁,张海涛,顾超超
(解放军理工大学 国防工程学院,江苏 南京 210007)
基于PWM的三维大气电场传感器驱动电机的转速控制
林 楚,陈晓宁,张海涛,顾超超
(解放军理工大学 国防工程学院,江苏 南京 210007)
为实现所设计的空中三维大气电场传感器的屏蔽转子稳定可靠的旋转,提出了以意法半导体公司第二代ARM微控制器STM32F103RC为核心集成电路的MCU(Micro Control Unit)电机控制系统。该系统由无刷直流电机构成的动力驱动系统、微控制器构成的中央控制系统、无线收发装置构成的无线收发系统,以及三维电场传感器、电子罗盘、陀螺仪、GPS等传感器构成的传感器测量系统组成。采用脉冲宽度调制(PWM)信号控制无刷直流电机驱动模块,通过编程模拟相应的旋转速度。实验结果表明,空中三维大气电场传感器的屏蔽转子能实现稳定旋转。
三维大气电场传感器;微控制器;无刷直流电机;脉冲宽度调制
0 引言
空中三维大气电场传感器[1]是用来检测大气电场强度的装置,通过电机驱动屏蔽转子旋转对感应电极进行交替屏蔽,使感应电极交替暴露在外电场中,感应电极上的感应电荷发生周期性变化,形成了交变的电流信号,其大小与外部电场成一定的比例关系,从而通过检测该电流的大小来检测电场强度。它由轴向(Z)和径向(X,Y) 3路电场测量单元和驱动单元以及电路单元组成。电场测量装置的发展已有半个世纪,最先出现的是一维电场测量装置,只能测量单一方向上的电场强度,随着研究工作的发展,出现了二维电场和三维电场测量装置。为了更加直接地掌握空中三维电场情况,在地面三维电场测量装置的基础上,笔者研制出了空中三维电场测量装置。
本文应用意法半导体公司的第二代ARM微控制器STM32F103RC为核心集成电路的MCU(Micro Control Unit)电机控制系统,通过调制PWM(Pulse Width Modulation)信号输出的占空比驱动无刷直流电机[2-5]。完成硬件电路连接之后,进行编程,将程序下载到微控制器中,电机就能旋转,然后利用无线收发系统发送接收指令实现电机转速控制[6-8],从而驱动空中三维大气电场传感器屏蔽转子的旋转。
1 空中三维大气电场传感器电机控制系统
1.1 空中三维大气电场检测系统总体架构
电场检测系统包括动力驱动系统、中央微控系统、无线收发系统、传感器测量系统。其中动力驱动系统由无刷直流电机构成。中央微控系统主要由STM32F103RC芯片构成。无线收发系统主要是由中心频率为170 MHz的型号为E50-TTL-100的无线模块构成。传感器测量系统由三维电场传感器、三维电子罗盘、三轴电子陀螺仪、GPS等传感器构成。空中三维大气电场检测系统架构如图1所示。
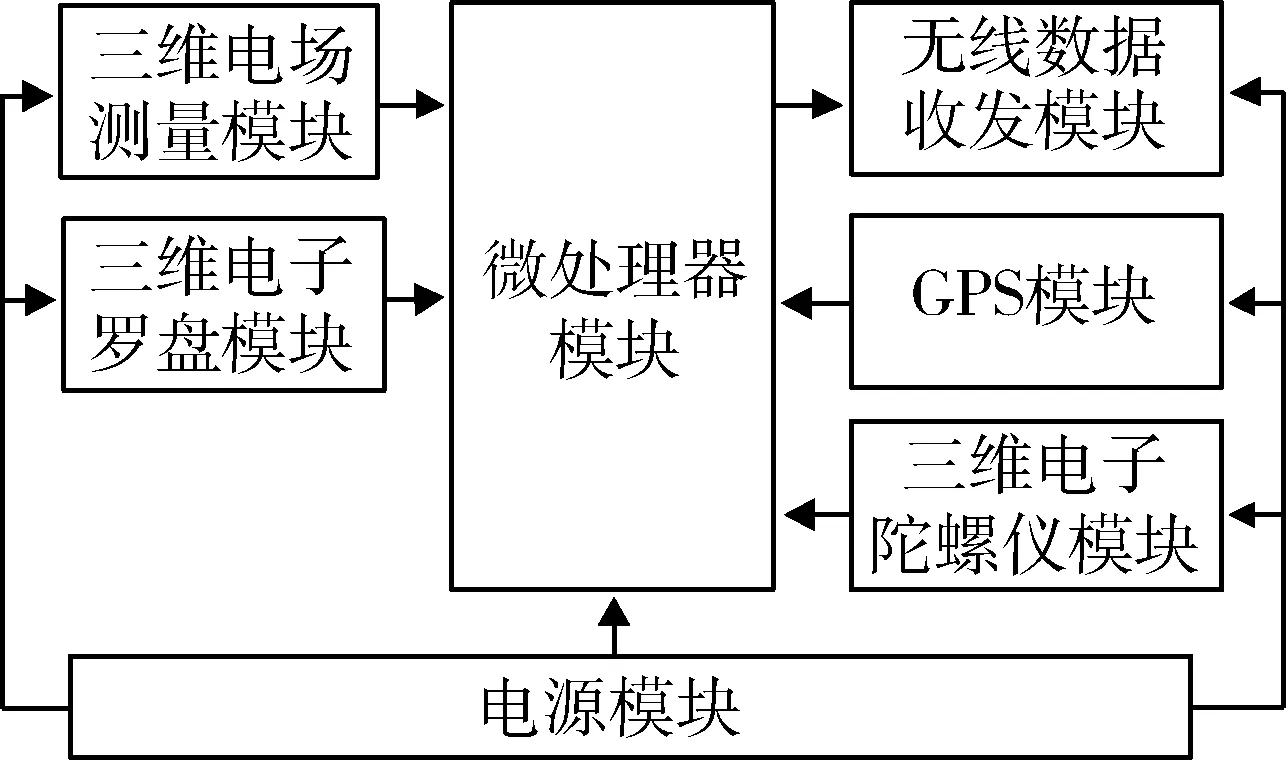
图1 空中三维大气电场检测系统架构
1.2 空中三维大气电场检测系统硬件选择
1.2.1 控制芯片选择
本系统选用ARM单片机的STM32F103系列的STM32F103RC芯片[9]。该芯片是32位基于第二代ARM内核的高性能大容量增强型微控制器,延伸了第一代ARM内核的特性,具有更快的运行速度、更低的功耗、端口资源也更加丰富,全部引脚都可以作为中断输入,串口可以直接下载程序,广泛应用于数据采集、数据分析处理、仪器仪表、工业通讯、电机控制等领域。最高可达72 MHz的工作频率,工作电压为2.0 V~3.6 V,工作温度为-40℃~+125℃,能够在低温、潮湿、震荡等恶劣大气环境中稳定运行。单片机内集成了11个定时器,其中包括4个16位通用定时器、2个看门狗定时器、2个用于驱动DAC的基本定时器、2个用于电机控制的16位PWM高级控制定时器和1个系统嘀嗒定时器,内置256 KB闪存及48 KB SRAM的高速存储器、3个12位的ADC转换器,13个通信接口,包括2个I2C接口、5个USART接口、3个SPI接口(其中2个可复用为I2S接口)、1个CAN接口、1个USB 2.0全速接口、SDIO接口,功能非常强大。
1.2.2 无刷直流电机驱动
空中三维大气电场传感器电机选用无刷直流电机,它利用电子换向器取代机械电刷和机械换向器,使无刷直流电机具有直流电机响应速度快、较大的启动转矩等优点,同时又取消了碳刷、滑环结构,在汽车、工具、工业控制、自动化以及航空航天等行业应用广泛,优势明显。无刷电机的使用寿命高达几万小时,能够满足电场传感器对长时间、高转速的性能要求。
无刷直流电机采用日产Nidec的12 V微型无刷电机,型号为13H055B020。该电机的外形尺寸为24.3 mm×19 mm,重量28 g,输出轴径2 mm。电机可以接PWM调速,PWM端直接接电源正极就可以最高转速运转,12 V时转速6 200 r/min,电机的控制驱动芯片是BD6922,内部没有碳刷,大大增加了电机的使用寿命。
1.2.3 电源选择
电源选用12 V、2 000 mA.h的锂电池供电,可以连续供电8~10 h。因为传感器输出的信号较微弱,所以需要设计信号放大电路对其信号进行放大,所使用的运算放大器需要±5 V电压为其供电,因此选用DC-DC电源模块,输出±5 V电压。又因为STM32F103RC芯片的工作电压为2.0 V~3.6 V,因此还需选用AMS1117稳压模块将+5 V输入电压稳压到3.3 V。
1.2.4 无线数据收发模块选择
无线数据收发模块采用中心频率为170 MHz的型号为E50-TTL-100的无线装置,无线通信距离为2 km,通过接收机与计算机的连接向发射机发出指令来实现电机转速的控制。发射机接单片机串口3(USART3),编程口接串口1(USART1)通过USB连接计算机下载程序。
1.3 空中三维大气电场传感器驱动系统PWM脉宽调制
空中三维大气电场传感器动力系统主要是通过PWM信号来驱动无刷直流电机。PWM是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,通过改变直流脉冲序列的占空比来实现电机转速的变化[10-14]。
STM32F103RC内置的定时器除了TIM6和TIM7都可以用来产生PWM输出,本文使用通用定时器TIM3的通道2(TIM3_CH2)产生一路PWM输出来控制电机的转速。这里要用到3个寄存器来控制PWM,分别是:捕获/比较模式寄存器(TIMx_CCMR1/2)、捕获/比较使能寄存器(TIMx_CCER)、捕获/比较寄存器(TIMx_CCR1~4)。在TIMx_CCMR1/2中,用到的是模式设置位OCxM,它由3位组成,可以配置成7种模式,本文使用的是PWM模式,所以这3位必须设置为110/111。在TIMx_CCER中,只用到了CC2E位,要想PWM从I/O口输出,该位必须设置为1。在TIMx_CCR1~4中,通过修改TIM3_CCR2的值即可实现脉宽控制电机的转速。但是,TIM3_CH2默认是接在PA7引脚上的,而电机的PWM输出接在PB5引脚上,因此要通过MCU的重映射功能,把TIM3_CH2映射到PB5引脚上。本文设置PWM波形的频率为10 kHz,因为MCU的频率外晶振最大为72 MHz,所以ARR(自动重装值)寄存器的定时器周期值为7 199不分频。PWM波形频率计算公式为:
(1)
其中,fCLK为时钟频率,P为计数器值,N表示分频因子(N可取1、8、64、256、1 024)。
2 空中三维大气电场传感器的结构设计与软件实现
2.1 空中三维大气电场传感器的机械结构设计
空中三维大气电场传感器的机械结构需保证对称性、稳定性、匀质性、绝缘性、小型性。对称性是指设计传感器感应电极时,每个方向上都采用两个对称结构,即轴向(Z)和径向(X,Y),电场测量单元由6个感应电极组成。稳定性要求机械器件连接牢固,屏蔽转子能够稳定旋转。匀质性要求材料的质地均匀。绝缘性要求电机轴与定子、转子之间要相互绝缘。小型化要求传感器体积要尽量小。三维电场传感器实物图如图2所示。

图2 三维电场传感器实物图
2.2 空中三维大气电场传感器的系统设计和调试
控制电场传感器的屏蔽转子旋转时需要改变捕获、比较寄存器TIM3_CCR2的值,以调节PWM信号占空比。PB12引脚处接一个发光二极管LED,通过对LED灯的亮灭控制来显示MCU的程序运行与否。控制电机转速的主程序流程图如图3所示。通过TIM3_CH2重映射到PB5上并由TIM3_CH2输出PWM来控制电机转速的流程图如图4所示。
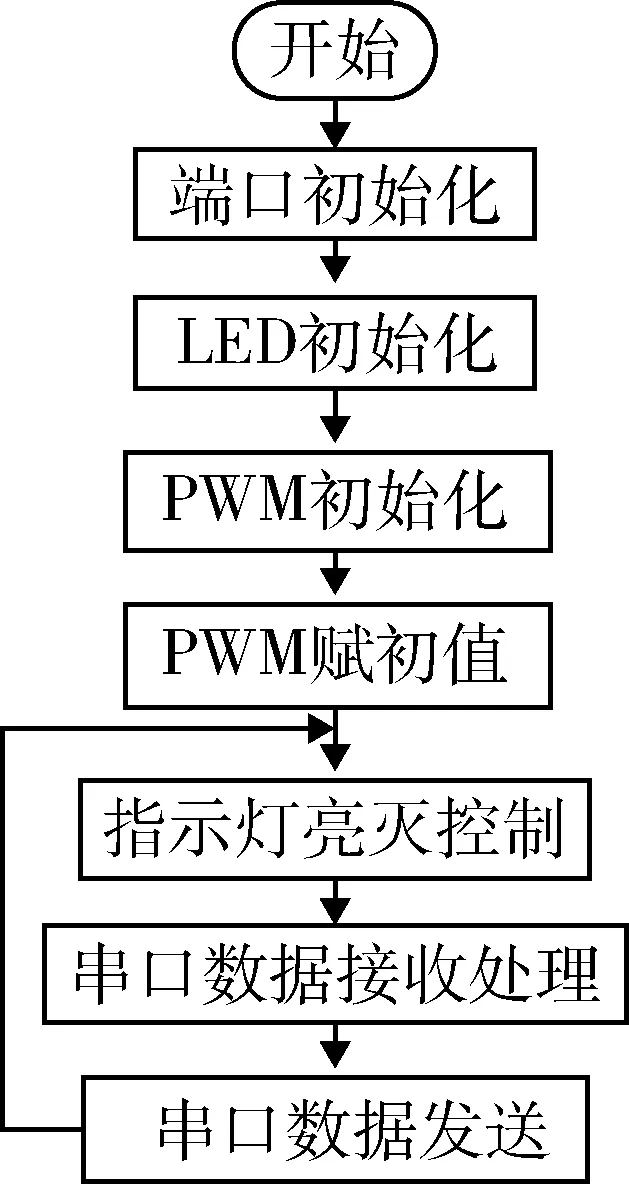
图3 控制电机转速的主程序流程图
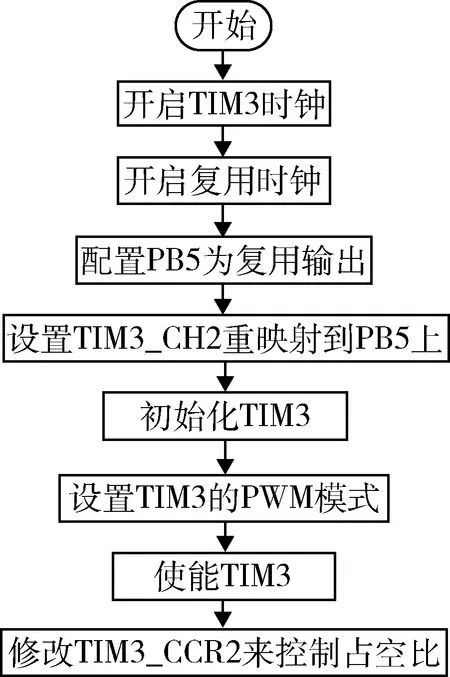
图4 TIM3_CH2重映射到PB5的流程图
经过编程调试,电机能够带动三维电场传感器的屏蔽转子旋转,在连接着无线接收模块的PC上,打开串口调试助手界面输入规定的指令就可以改变电机的转速,因为电机的转速是通过调节PWM输出的占空比来改变的,因此通过示波器可以看出不同电机转速下PWM输出波形的占空比变化情况,如图5所示。
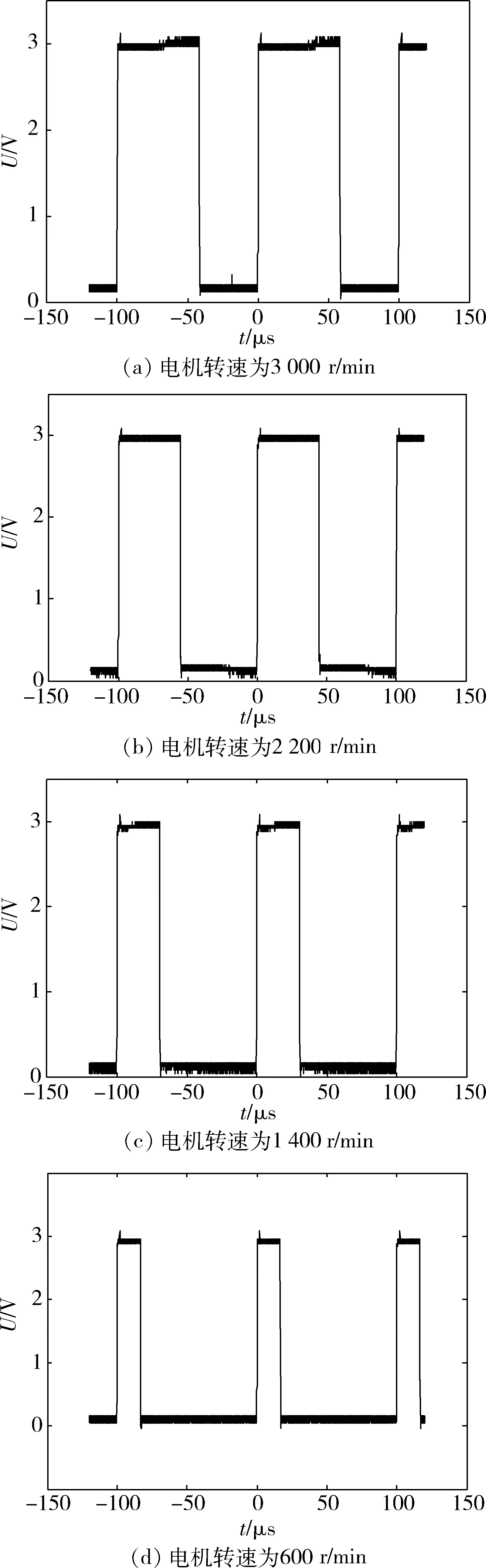
图5 不同转速下电机PWM输出波形占空比的变化
通过图5可以看出随着电机转速的变化,电机输出的PWM波形的占空比随之变化,并且电机的转速越快,占空比越大。
3 结论
本文通过对空中三维电场传感器电机控制系统的研究,设计了一种以ARM微控制器STM32F103RC为核心的MCU控制电路。给出了动力驱动系统、中央控制系统、无线收发系统、传感器测量系统的系统架构和实现流程。调试结果表明空中三维电场传感器的屏蔽转子能实现稳定旋转。
动力驱动系统应用中央控制系统的PWM输出控制驱动无刷直流电机的旋转并且通过对PWM输出波形占空比的调制来实现电机转速的变化。无线收发系统采用170 MHz的无线收发模块对中央控制系统进行指令收发控制,然后核心控制系统再对动力系统进行控制。
目前已经完成了空中三维大气电场测量系统电机转速的调试,后期将会对该测量系统的三维电场数据采集模块进行调试与标定,确保采集到的三维电场数据真实有效。
[1] 张星,白强,夏善红,等.小型三维电场传感器设计与测试[J].电子与信息学报,2007,29(4):1002-1004.
[2] 汤金萍, 周雷, 金阿锁. 基于MSP430单片机的四旋翼飞行器控制系统设计[J]. 微型机与应用, 2016, 35(20): 9-12.
[3] 曾宪阳,杨红莉,郁汉琪.基于STM32单片机四旋翼飞行器建模分析与设计[J].电子技术应用,2016,42(12):65-67.
[4] 何川, 李智, 王勇军. 基于STM32的四旋翼飞行器的姿态最优估计研究[J]. 电子技术应用, 2015,41(12):61-64.
[5] 张琛. 直流无刷电动机原理及应用[M]. 北京: 机械工业出版社, 1996.
[6] 王兴华, 陈瑜, 杨乐梅.无刷直流电动机的单片机控制[J]. 山东工业大学学报, 2000, 30(4): 306-310.
[7] 王晓明. 电动机的单片机控制[M]. 北京: 北京航空航天大学出版社,2007.
[8] 崔丽, 叶先明. 基于AVR单片机的直流无刷电机智能控制系统设计 [J]. 仪表技术与传感器, 2009(11): 34-36.
[9] 李宁. 基于MDK的STM32处理器开发应用[M]. 北京: 北京航空航天大学出版社,2008.
[10] 王苏. 直流电机PWM调速研究及单片机控制实现[J]. 机电工程技术, 2008,37(11): 82-84.
[11] 李秀英, 刘彦博. 基于PWM的四旋翼飞行器控制方法[J]. 微波学报, 2011, 26(5):464-472.
[12] 何立民. 单片机应用系统设计[M]. 北京: 北京航空航天大学出版社, 1990.
[13] 彭楚武.微机原理与接口技术[M].长沙:湖南大学出版社,2004.
[14] 李强, 林明耀. 无传感器无刷直流电机控制系统及其启动分析[J]. 微电机, 2003, 36(3):33-35.
Speed control of the drive motor of the three dimensional atmospheric electric field sensor based on PWM
Lin Chu, Chen Xiaoning, Zhang Haitao, Gu Chaochao
(Institute of National Defense Engineering, PLA University of Science and Technology, Nanjing 210007, China)
In order to achieve the rotation of the shielding rotor of the designed air three-dimensional atmospheric electric field sensor is stable and reliable, this paper proposed the MCU (Micro Control Unit) motor control system which is based on the second generation ARM Micro controller STM32F103RC that is produced by STMicroelectronics company. The system includes drive system composed by brushless DC motor, central control system composed by microcontroller, wireless transceiver system composed by a wireless transceiver, and sensor measurement system composed by three-dimensional electric field sensor, electronic compass, gyroscope, GPS and other sensors. Using pulse width modulation (PWM) signal to control the drive module of the brushless DC motor, and programming, simulating the corresponding rotational speed. The experimental results show that the shielding rotor of the three dimensional atmospheric electric field sensor can realize stable rotation.
three-dimensional atmospheric electric field sensor; microcontroller; brushless direct current motor; pulse width modulation
TM155
A
10.19358/j.issn.1674- 7720.2017.11.009
林楚,陈晓宁,张海涛,等.基于PWM的三维大气电场传感器驱动电机的转速控制[J].微型机与应用,2017,36(11):31-33,36.
2017-01-14)
林楚(1991-),通信作者,女,硕士,主要研究方向:电力系统雷电防护研究。E-mail:1016220101@qq.com。
陈晓宁(1963-),女,教授,主要研究方向:电力系统雷电防护研究。
猜你喜欢
大电机技术(2022年5期)2022-11-17
汽车实用技术(2022年12期)2022-07-05
中学生数理化(高中版.高考理化)(2021年11期)2022-01-18
家庭影院技术(2021年8期)2021-11-02
中学生数理化(高中版.高考理化)(2021年3期)2021-05-21
学生天地(2020年18期)2020-08-25
电子制作(2017年1期)2017-05-17
新高考·高一物理(2016年7期)2017-01-23
电子制作(2016年1期)2016-11-07
河北书画研究(2016年2期)2016-08-24