基于机器视觉的金属表面缺陷检测方法研究
2017-06-14 09:42翟伟良李有煊黄浩湄黄茂发陈俊杰
科技传播 2017年9期
翟伟良+李有煊+黄浩湄+黄茂发+陈俊杰+莫锦超
摘 要 普通的图片成像中一般都为像素灰度值的成像形式,因此对于表面缺陷检测方法主要有灰度阈值分割法、灰度数据边缘振幅提取法和傅立叶数据变化提取等方法,一般都是应用于表面内灰度值变化不大的情况[1]。其中对于金属表面的检测中,基本适合使用以上方法进行处理,但是如果出现金属表面有反光或图像噪声异常等情形时,单纯的检测方法不再适合对表面进行检测,本文应用了基于灰度值对比方式对表面异变大的区块独立化进行表面缺陷检测处理,实现良好的反光和图像噪声的控制效果,并且实现了表平面缺陷检测中的划痕、污点和凹陷等功能。
关键词 灰度值;表面缺陷检测;视觉成像;图像噪声
中图分类号 TP3 文献标识码 A 文章编号 1674-6708(2017)186-0047-02
金属表平面的缺陷检测中主要有划痕、污点和凹陷等检测功能,应用基于灰度阈值的分割法能实现基本检测功能,但是实际的场景应用中金属会出现较大的反光情况,会导致检测效果极差,主要的误判经常出现在反光边缘交界处,反光的内部区域灰度变化的情况依然适合灰度阈值的处理方法,因此我们就可以通过标准图片的灰度值对比方式,把变化大的区域独立分离成适合于灰度阈值处理的区域,再细化进行检测。应用灰度对比提取缺陷区域的方法和基于灰度閾值分割的缺陷判断方法相结合进行金属表面缺陷检测[ 2 ]。如图1为本文使用的金属检测表平面。
1 独立缺陷区块的提取
对整体的检测区域进行一个粗略的分离效果,通过一个标准的表面内的像素点进行灰度值的提取,后通过检测过程中对每个像素点灰度值对比的方式提取出变化较大的点集,初步形成含有缺陷的区域,为后面的准确查找缺陷区域做准备[ 3 ]。
1.1 灰度数据点定位

2 基于灰度阈值的缺陷判断方法
2.1 图片噪音处理
对于灰度阈值方式而言,适合处理一个较为平均的灰度变化,因此本文选择更加合适的均值平滑进行噪音处理,其中均值平滑是基于像素掩码处理的平滑方式,通过给定一个m×n的像素矩形进行逐一像素的扫描,把该矩形内包含的像素求平均值后把该矩形内的像素都设置为该平均值,从而达到均值平滑处理的效果,其中选取的像素矩形越大,则平滑处理效果越明显。对于本文表面的噪点处理,所需要处理表面的噪点比较少,使用3×2像素矩形进行平滑处理即可达到处理效果。
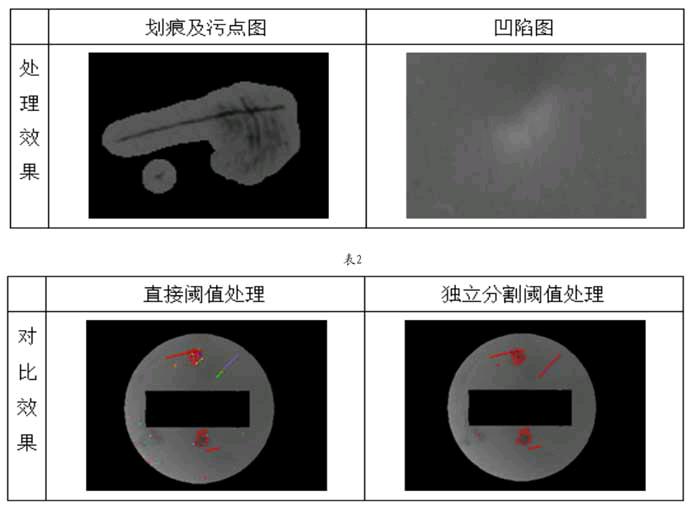
2.2 缺陷灰度增强处理
通过灰度增强处理算法,把缺陷区域灰度值和背景区域灰度值进一步的扩大对比度,从而更加准确的提取出缺陷区域[ 5 ]。增强算法公式为:
3 结论
如表格2所示为直接的阈值处理效果和独立分割阈值处理的效果对比图表,由可知本文使用基于灰度对比的区块化处理的缺陷检测方法,实现的图片处理过程中的分块结构处理,使得复杂变化的问题单一提取处理,使得算法的特征处理简单化,且使用了图片增强对比度的计算尽最大可能的抑制图片噪音的变化情况,使得特征处理更加稳定化,本文的方法适合于绝大部分表面灰度值基本一致的金属表面缺陷处理情况。
参考文献
[1]罗菁,董婷婷,宋丹,等.表面缺陷检测综述[J].计算机科学与探索,2014(9):1041-1048.
[2]聂振宇.金属部件表面缺陷视觉检测系统研究[D].长沙:中南大学,2013.
[3]官燕燕,刘昕.基于统计阈值法的印品缺陷检测[J].西安理工大学学报,2007(4):410-413.
[4]吴晓军,邹广华.基于边缘几何特征的高性能模板匹配算法[J].仪器仪表学报,2013(7):23-30.
[5]韩宝立,刘杨涛.图像平滑算法的研究与改进[J].电脑知识与技术,2009(30):8540-8542.