具有直流励磁的开关磁阻电机矢量控制系统
2017-06-13 09:02:24王思浩孙建忠
微特电机 2017年6期
王思浩,孙建忠
(大连理工大学,大连116024)
0 引 言
具有直流励磁的开关磁阻(以下简称SRDC)电机是在继开关磁阻电机之后,又一个新的研究方向。20世纪90年代,T.A.Lipo等人提出一种新型电机,即在开关磁阻电机定子上增加一套永磁体来作为简单的励磁装置[1]。这种电机仍然具备SRM的优点,称为永磁双凸极电机。但由于永磁体的存在,削弱了开关磁阻电机在高温环境下运行的能力。Y.Li等提出了一种SRDC电机,将励磁改为电励磁[2]。Z.Q.Zhu等对SRDC电机进行了改进,并将传统的开关磁阻电机与SRDC电机在性能上做出了对比,证明其有着和开关磁阻电机相同的转矩输出及调速能力,但转矩脉动更小[3]。X.Liu等提出 SRDC 电机可以作为同步电机来控制,采用矢量控制,并进行了实验,证明SRDC电机采用矢量控制可以更好地减小噪声和脉动[4]。
本文首先介绍SRDC电机的基本结构,并对根据文献[5]中所提到的SRDC电机的数学模型进行分析,建立SRDC电机的Simulink电机本体模型,分析如何将矢量控制应用于SRDC电机中。
1 SRDC电机
SRDC电机结构如图1所示,SRDC电机和传统的开关磁阻电机相同,定转子采用双凸极结构。相比于传统的开关磁电机,在定子上增加一层直流绕组作为励磁使用,直流绕组串联连接,连接方式如图2所示;交流绕组采用4路并联的方式,齿槽中的绕组,内层为交流绕组,外层为直流绕组。本文Magnet仿真试验所采用的样机,是一台3相12/8极,额定功率5.5 kW,额定转速1 500 r/min,直流绕组匝数为100匝,交流绕组匝数为180匝的SRDC电机。Magnet仿真运行时直流绕组通以1~2 A的直流电流,交流绕组通以三相互差120°的正弦交流电流,电机的三相绕组采用星形连接的方式。

图1 电机结构
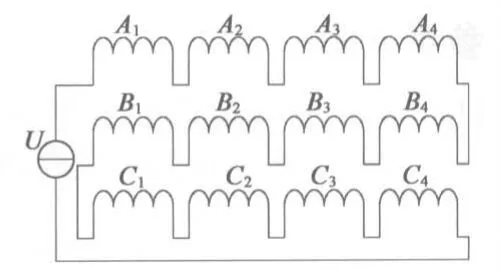
图2 电机直流绕组连接方式
2 SRDC电机数学模型
SRDC相电压方程:

运动方程:

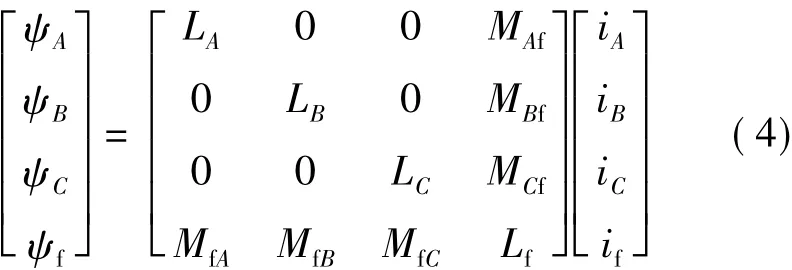
由于直流励磁的存在,电机的磁链方程:

式中:Li表示每一相的自感;Mij表示相间互感;if表示励磁电流。
Magnet分析电机磁链特性,A相通入24 A的直流,B,C相及直流绕组都不通电流的情况下,结果如图3所示。可以看出,上述通电情况下A,B,C三相的磁链,交流绕组的相间互感相比于每一相的自感可以忽略不计。
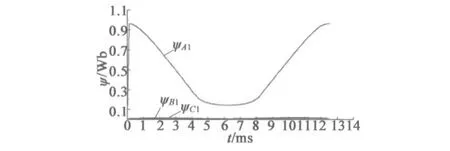
图3 A相通电下的三相磁链
由于交流绕组之间的互感相比于每一相的自感可以忽略不计,式(3)可以改写成如下形式。
交流绕组与直流绕组之间的互感,与交流绕组的相自感之间的比值为一常数Kf。可以由下式表示:
将式(2)、式(4)、式(5)代入式(1),可得到如下相电压方程。

SRDC输出转矩由两部分组成:一部分是由交流绕组产生的磁阻转矩;另一部分是由直流绕组产生的励磁转矩。

式中:Trk表示磁阻转矩;Tek表示励磁转矩;Nr表示转子极数。
机械方程:

式中:T表示三相合成转矩;Tl表示负载转矩;J表示转动惯量。
3 SRDC电机本体建模
通过Magnet计算电机的磁链,由于电机交流绕组采用四路并联的方式,如图4所示。A相通入4 A的直流电流,B,C相及直流绕组不通电的情况下,每个绕组会流过1 A的电流,测得A相的磁链。直流绕组为串联连接的方式,直流绕组通入1 A的直流,交流绕组不通电的情况下,测得的曲线即为直流绕组与交流绕组之间的互感磁链,仿真结果如图5所示。根据式(5)及图5,可以得到Kf为3。
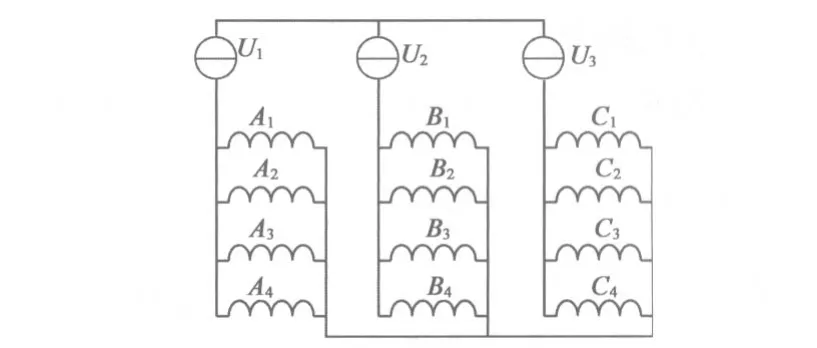
图4 交流绕组连接方式
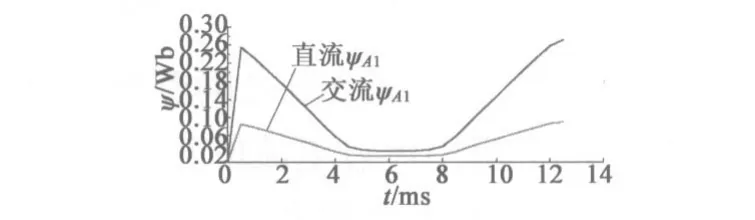
图5 自感及互感曲线
本文的电感分布律采用余弦模型来近似等效:
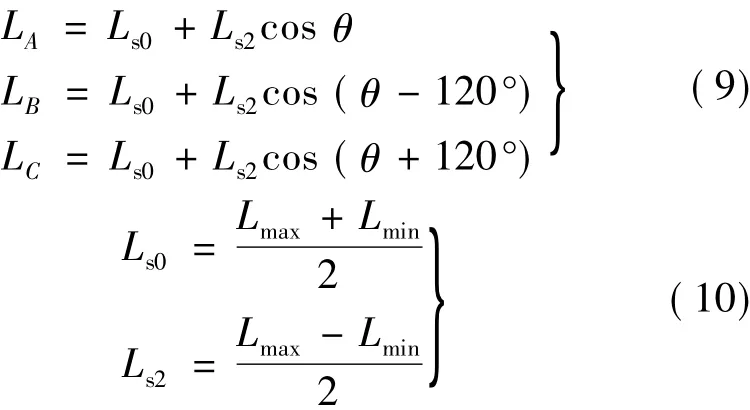
式中:Lmax,Lmin分别为交流绕组的最大电感和最小电感。Ls0=0.025 4 H,Ls2=0.022 1 H。
MTALAB中的Simulink电机本体的建模可采用两种方法,一种利用有限元仿真软件,根据电磁场分析计算出的电机电流随着电感及位置变化的分布,建立电机模型;另一种是根据电机的数学解析模型建模。本文根据SRDC的数学模型对其电机本体进行建模。
根据式(5)~式(10)所介绍的SRDC数学模型,Simulink中建立的电机本体模型如图6所示。三相模块的内部结构如图7所示。

图6 电机本体模型

图7 三相模块内部结构
4 SRDC电机矢量控制系统
4. 1 SRDC电机控制方式
根据SRDC电机的转矩公式(式(7))可知,由于电流平方项的存在,磁阻转矩的正负与电流的正负无关,只与交流绕组自感的变化率有关。直流绕组一直通入正的电流,励磁转矩的正负,不仅与直流绕组和交流绕组之间互感的变化率有关,而且与交流绕组中流过电流的正负有关。
SRDC电机相比于传统的开关磁阻电机,传统的开关磁阻电机在电感上升区通电产生正的输出转矩,在电感下降区通电产生负的输出转矩;同样SRDC电机在电感上升区也通电会产生正的磁阻转矩,在电感下降区通电也会产生负的磁阻转矩,但是无论在电感上升或下降区,都产生正的励磁转矩。
文献[6]提到此种类型的双凸极电机有如下两种控制方式。
(1)单拍模式:在电感上升区通正电,在电感下降区通负电,任一时刻只有一相通电,三相交替通电。通电方式如图8所示。
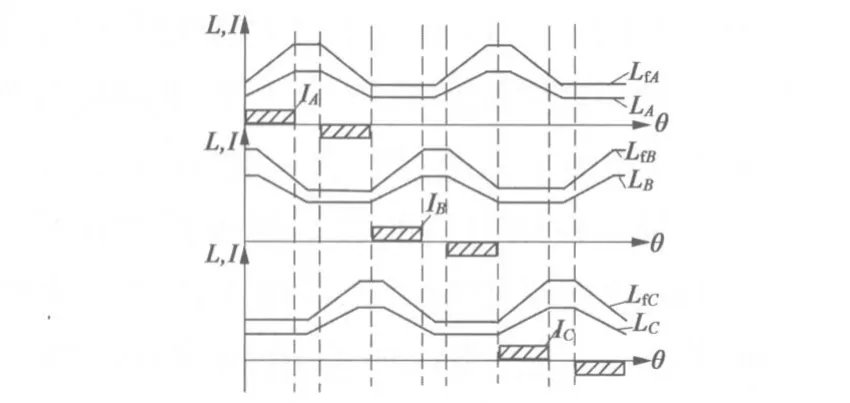
图8 单拍模式
(2)双拍模式:在电感上升区通正电,在电感下降区通负电,和单拍模式不同的是,双拍模式任一时刻有两相通电,如图9所示。在双拍模式下,通电两相产生的磁阻转矩基本抵消,输出主要为励磁转矩。双拍模式相比于单拍模式,转矩脉动就更小。

图9 双拍模式
本文所采用的控制方式,类似于双拍模式,在电感上升区通正电,在电感下降区通负电,但不是通入恒定不变的电流,而是通入正弦电流,随着电感的上升和下降绕组中流过的正弦电流如图10所示,矢量控制的目标就是控制功率电路,随着电机电感的变化,电机绕组上流过的电流为图示电流。图10为一相的电流波形,3相的电流波形,形状相同,相间互差 120°。
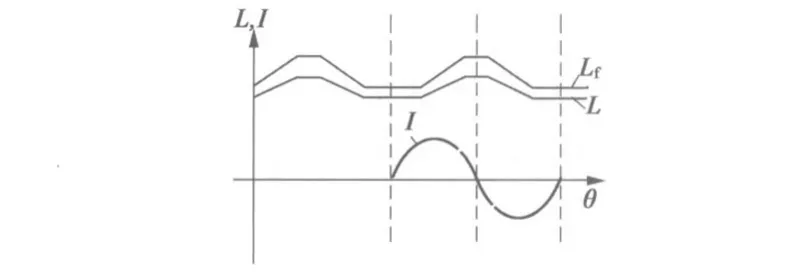
图10 随着电感变化的电流波形
4. 2 坐标变换
为使得SRDC电机绕组上可以流过正弦电流,电机的控制方式采用矢量控制。在矢量控制中,不能直接控制三相电流,要通过坐标变换,将三相静止坐标系上的电流,变换为两相旋转坐标系上的电流来控制。首先将电流由三相静止坐标系经过Clarke变换至两相静止坐标系。
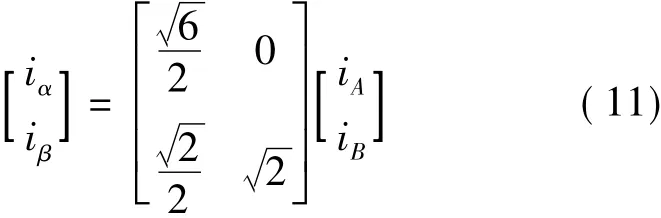
三相绕组星形连接,三相电流的和为0,即iA+iB+iC=0,所以iC可以由iA及iB来表示。
再经过Park变换由两相静止坐标系变换为两相旋转坐标系上的电流。

本文所采用的矢量控制方式,要使交轴电流iq输出为一个正的常数,使直轴电流id输出为0,即id=0。在dq电流经过PI调节之后,iq输出为一个正的常数,id输出为0的情况下,要经过如下的Park逆变换,将电流由两相旋转坐标系,变换为两相静止坐标系,才可以计算占空比,控制开关电路,使电机输出图10的电流波形。

SRDC电机和传统的开关磁阻电机采用的功率电路不同,传统的开关磁阻电机采用三相不对称半桥功率电路,SDRC电机,运行时三相绕组星形连接,要采用三相全桥功率电路,如图11所示。建立整个控制系统框图如图12所示。

图11 三相全桥功率电路
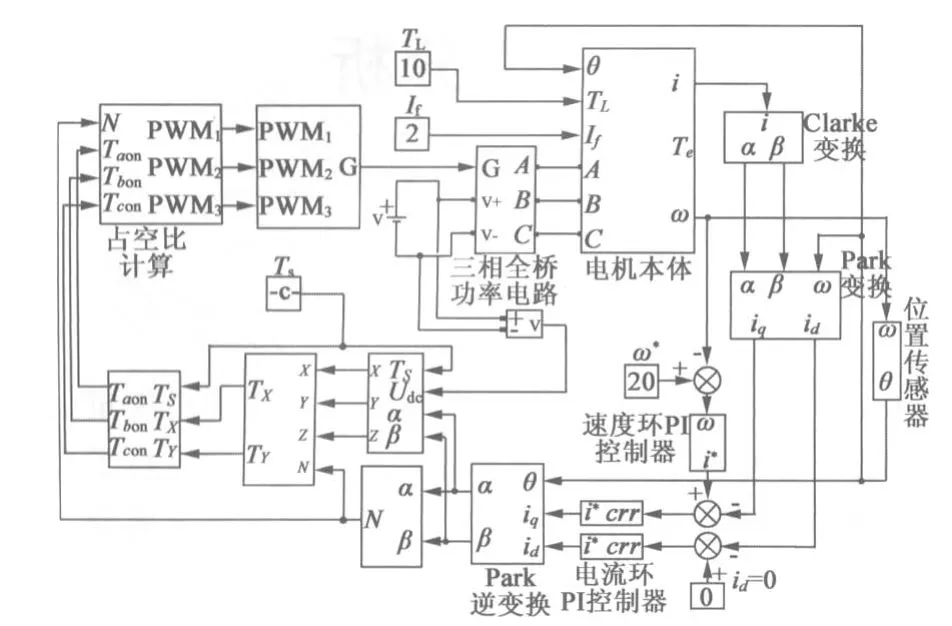
图12 矢量控制系统
4. 3 仿真结果
在上述控制系统下,测定低速下的运行状况,在给定转速为20 rad/s,负载为10 N·m,励磁电流为2 A的条件下,并调节电流及转速环的PI参数,运行整个系统。测得的转速波形如图13所示,电机起动时会有一些转速波动的存在,当电机运行至0.20 s时,转速达到平稳。

图13 转速波形
电流波形如图14所示,转矩波形如图15所示,起动时电流较大,且波形有些不规则,在起动结束后电流波形是正弦波。
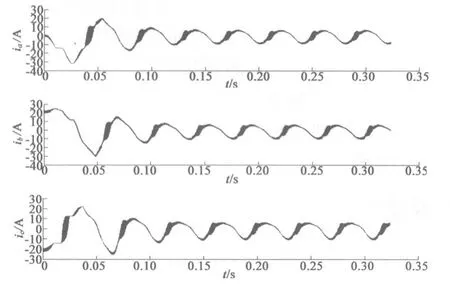
图14 电流波形

图15 转矩波形
4. 4 实验结果
在实物平台上对SRDC电机的矢量控制系统进行验证,控制系统采用dsp28335芯片,主电路采用三相全桥功率电路。控制电路主要包括:开关电源,位置信号处理电路,电流检测电路,驱动电路。在运行时通过直流电源供给电机直流绕组以恒定的电流。对一台三相12/8极,额定功率5.5 kW,额定转速1 500 r/min的SDRC电机进行空载低速的运行实验。在一定给定转速的条件下测得的电流波形如图16所示。

图16 实测电流波形(截图)
5 结 语
本文通过SRDC电机的数学模型,建立其电机本体模型,应用Magnet进行电机的磁链分析,并通过Simulink仿真SRDC电机的矢量控制系统。从仿真结果可以看出:矢量控制应用于SRDC电机,可以实现调速;但在应用矢量控制时,在电机绕组上产生的电流波形,不是关于坐标轴上的某一点中心对称的正弦波,而是在竖直方向有一定的平移;输出转矩在电机平稳运行时一直为正,但有一些转矩脉动的存在。通过实物实验验证了仿真结果,实验结果和仿真结果是相符合的。
[1] LIAO Y,LIPO T A.A new doubly salient permanent magnet motor for adjustable speed drives[J].Proceed.of Electric Machines and Power Systems,1994,22(2):259 -270.
[2] LI Y,LLOYD J D,HORST G E.Switched reluctance motor with DC assisted excitation[C]//Industry Applications Conference.IEEE,1996:810 -807.
[3] AZAR Z,ZHU Z Q.Comparative study of electromagnetic performance of switched reluctance machines under different excitation techniques[C]//Energy Conversion Congress and Exposition(ECCE).IEEE,2013:4334 -4341.
[4] LIUX,ZHUZQ.DC -link capacitance requirement and noise and vibration reduction in 6/4 switched reluctance machine with sinusoidal bipolar 3xcitation[C]//Energy Conversion Congress and Exposition(ECCE).IEEE,2011:1596 -1603.
[5] 娄伟,孙建忠,白凤仙,等.具有直流励磁的开关磁阻电机解析模型[J].大连理工大学学报,2016,56(1):50-55.
[6] 张乐.电励磁双凸极电机调速系统非线性建模与控制[D].南京:南京航空航天大学,2006.
[7] 汤新舟.永磁同步电机的矢量控制系统[D].杭州:浙江大学,2005.
[8] 徐文伟.永磁同步电机矢量控制的实现[D].广州:华南理工大学,2013.
猜你喜欢
河北电力技术(2021年2期)2021-07-29 09:16:30
防爆电机(2021年4期)2021-07-28 07:42:46
哈尔滨铁道科技(2020年4期)2020-07-22 02:22:28
电子制作(2018年1期)2018-04-04 01:48:34
大电机技术(2017年3期)2017-06-05 09:36:02
电子设计工程(2017年20期)2017-02-10 03:40:05
电源技术(2015年12期)2015-08-21 08:58:44
电测与仪表(2015年12期)2015-04-09 11:44:44
电机与控制应用(2015年1期)2015-03-01 03:49:08
水电站机电技术(2014年4期)2014-10-13 08:30:07