
友谊轧钢厂Ф120 mm热轧无缝钢管生产线动态无功补偿及谐波抑制
2017-06-07 18:40王少军王小艳
科技与创新 2017年10期
关键词:无功补偿
王少军++王小艳
文章编号:2095-6835(2017)10-0043-03
摘 要:简要介绍了冲击性负荷和高次谐波造成的伤害,论述了TCR型SVC系统的相关内容,并阐述了SVC设计方案,以期为日后的相关工作提供参考。
关键词:无功补偿;谐波抑制;SVC;晶闸管控制电抗器
中图分类号:TM761 文献标识码:A DOI:10.15913/j.cnki.kjycx.2017.10.043
采用晶闸管可控整流控制系统控制轧钢生产线电气传动系统,具有控制特性好、性价比高等优点。轧钢生产线是一个非线性的冲击性负荷,产生流入电网的高次谐波电流,同时,还会消耗大量的无功功率。谐波电流在电网阻抗上产生谐波电压,引起电网供电电压畸变,影响供电质量和运行安全。另外,轧机运行工况复杂,电网进线上的功率因数波动比较大,自然功率因数很低,增加了线路损耗,加剧了电压偏移,对电网和企业本身电气设备都会造成不良的影响。要想提高轧钢生产线的用电功率因数,改善电能质量,优化用电环境,就需要对其进行谐波治理和无功补偿。为了解决这些问题,在轧钢生产线的10 kV供电系统中设置了1套静止型动态无功补偿装置(SVC)。
1 冲击性负荷和高次谐波造成的危害
有功冲击和无功冲击会在一定程度上影响电力系统的频率和电压,具体表现为以下几点:①电动机的转矩与电压的平方成正比,如果负载转矩不变,而电动机长期低压运行,就会使电机发热,甚至烧掉电机。②低电压会出现比如继电器、接触器、磁力启动器吸合变慢、烧坏触头,抱闸打不开,电磁元件和设备的动作不可靠的情况。③电压下降使得晶闸管变流器的整流电压下降,移相器移相角变化,引起直流输出变化,影响直流设备的工作。④电压波动会影响电气照明质量。对于气体光源灯,低电压会导致电气照明自动熄灭,也会造成电气照明的闪变。⑤电压的波动会使电子控制系统失灵。冲击负荷既会影响电力系统,又会对用电设备造成危害。
高次谐波也会对电力系统和电气设备造成不利的影响,主要表现为以下几点:①谐波会导致系统和电气设备在使用过程中的效率降低;②加速电力电缆的绝缘老化,使其更容易被击穿,以致事故发生;③影响继电保护装置动作的准确性;④对通讯线路和控制信号造成电磁干扰。
2 TCR型SVC系统
2.1 TCR型SVC的基本结构和原理
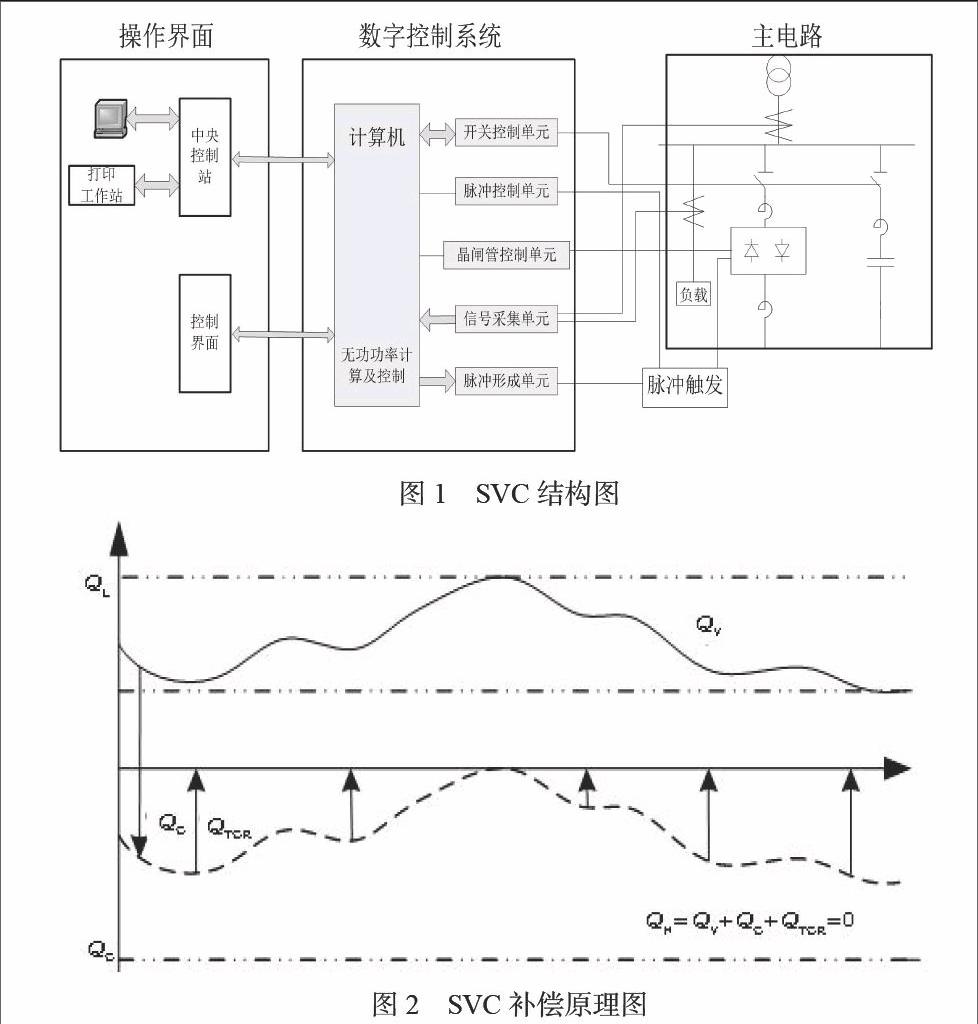
SVC结构如图1所示。从图1中可以看出,TCR型SVC由晶閘管相控电抗器部分、高次谐波滤波部分组成,整个系统连接在常见电压等级(比如6 kV,10 kV,35 kV)的高压供电母线上,并与欲补偿的电力负载并联,SVC中相控电抗器部分由全数字控制系统控制。全数字控制系统通过从母线电流互感器、电压互感器测量到的相关电流量和电压量,运用相应的数字信号处理技术,得到对相控电抗器的触发信号,继而控制晶闸管的导通,发出相应的感性无功,实现对动态负荷的实时补偿。在SVC系统中,FC部分起到了滤除系统中高次谐波和对基波提供容性无功功率固定补偿的功能。整个系统的补偿功能原理如图2所示。
如图2所示,QL为负荷工作时的无功功率曲线,它在区间QVmax到QVmin之间波动,代表了冲击性负荷工作时的状况。SVC由FC部分提供固定的容性无功QC,其选型和设置标准为补偿负荷波动的最大无功功率QVmax。当负荷工作状态改变时,QL随之变化,通过调节晶闸管控制电抗器吸收的QTCR来抵消QL的变化,使系统无功QN=QL-QC+QTCR=0,或者等于常数,实现电网功率因数等于常数,从而使系统实现动态无功平衡。
2.2 晶闸管控制电抗器(TCR)基本结构和电气原理
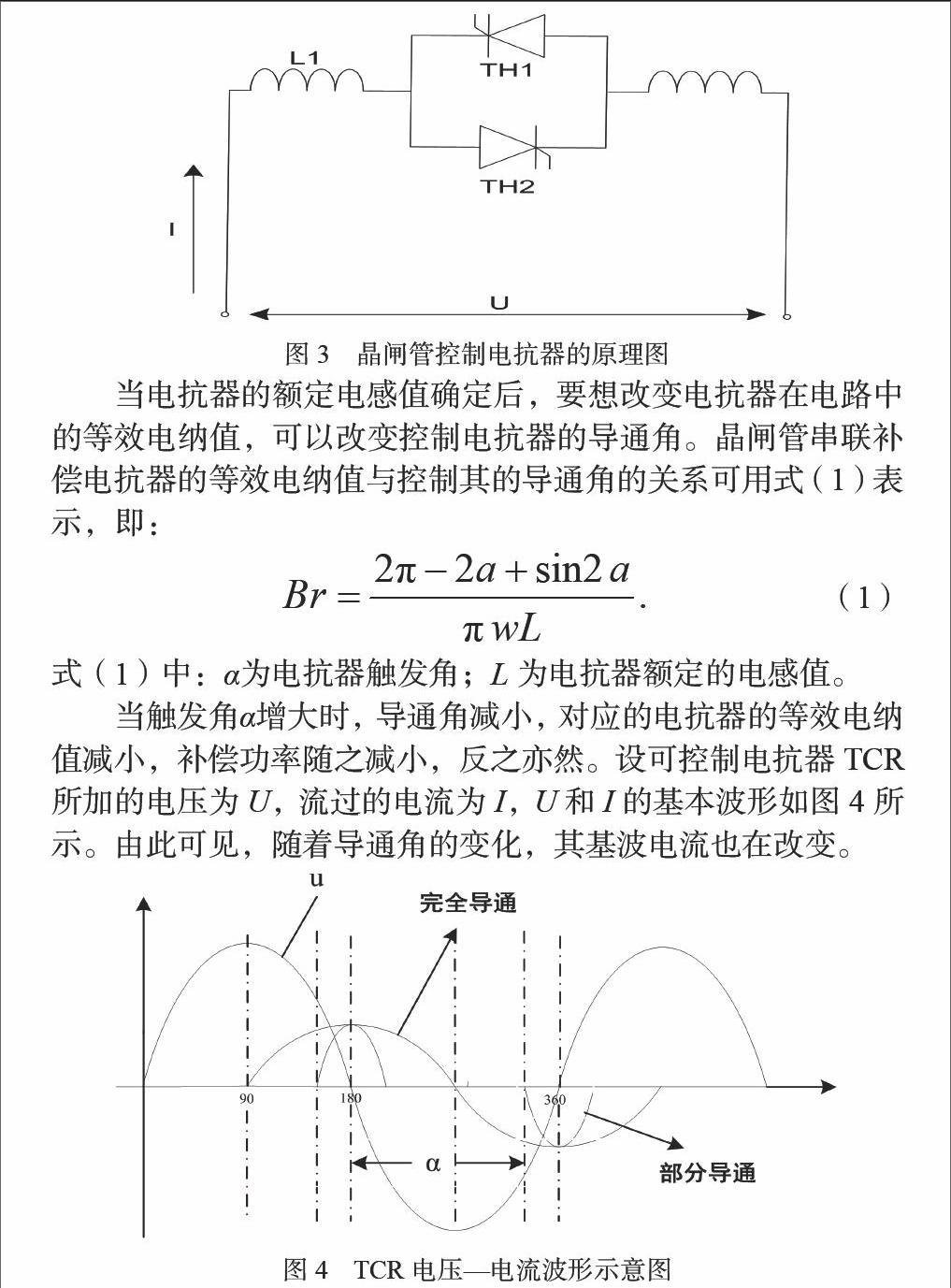
晶闸管控制电抗器(TCR)的单相基本结构是,2个反并联的晶闸管与1个电抗器串联,而实际中三相采用三角形联结形式,晶闸管以串联的形式连接。这里所说的控制,都是指由2个反并联的晶闸管实施的正负半波的对称控制,这样的电路并联到电网上,本质上相当于电感负载的交流调压电路的结构。图3为晶闸管控制电抗器的原理图,图中晶闸管串联阀组接受来自控制系统的控制信号。
由交流调压电路理论分析可知,当负载为纯电感时,交流调压电路的触发角移相范围为90°~180°,其位移因数始终为0,所以,流过电抗器的基波电流均为无功电流。当触发角为90时,晶闸管完全导通,导通角等于180。此时,与晶闸管串联的电抗器相当于完全接入到电网中,产生的无功功率与基波电流为最大值。当触发控制角在90°~180°之间时,纯电感的交流调压电路为部分区间导通,导通角小于180。增大控制角的效果就是减少电流中的基波分量,相当于增大补偿器的等效感抗,或者说减小其等效电纳,因而减少了其吸收的无功功率。由此可知,用于补偿的晶闸管串联电抗器的等效电纳值与电抗器的导通角有关。
当电抗器的额定电感值确定后,要想改变电抗器在电路中的等效电纳值,可以改变控制电抗器的导通角。晶闸管串联补偿电抗器的等效电纳值与控制其的导通角的关系可用式(1)表示,即:
(1)
式(1)中:α为电抗器触发角;L为电抗器额定的电感值。
当触发角α增大时,导通角减小,对应的电抗器的等效电纳值减小,补偿功率随之减小,反之亦然。设可控制电抗器TCR所加的电压为U,流过的电流为I,U和I的基本波形如图4所示。由此可见,随着导通角的变化,其基波电流也在改变。
在控制系统的控制下,得到如图4所示的晶闸管控制电抗器的电压—电流特性曲线。此特性实际上是晶闸管控制电抗器的稳态特性,电抗器在导通角为可移相范围内任意一角度时,对应的等效感抗伏安特性上的点构成了此特性曲线。控制系统根据供电系统负载的负荷变化不断调节触发控制角,从而对应地调节导通角。因此,晶闸管控制电抗器的工作点能够从它的特性曲线上的一个稳定工作点运动到另一个稳定工作点,而特性曲线的斜率以及在电压轴上的截距,即无补偿功能时的正常工作电压,都是由控制系统的具体参数来确定的。
3 SVC设计方案
钢铁企业供配电系统是否装设静止补偿器,主要是由企业波动无功负荷(比如炼钢电弧炉、轧钢机等)引起的,公共供电点(PCC点)处的电压波动值和闪变电压等效值是否超过国家规定的标准。在考虑SVC的容量和型式时,要同时满足负荷的功率因数和谐波标准的要求。由于所能获取的资料有限,下面提供某钢厂生产线数据实例。
工程高压供配电设施包括整流变压器(1 800 kVA,10 kV,1台),整流变压器(3 600 kVA,10 kV,2台),整流变压器
(4 500 kVA,10 kV,2台),动力变压器(1 000 kVA,10 kV,1台),动力变压器(2 000 kVA,10 kV,1台),浊环供水泵(配用电机500 kW,10kV,2台),工程装机总容量为11 194 kW。
根据负荷特性,工程设置10 kV高压动态无功补偿滤波装置1套。每套补偿容量為6 000 kVar,分成3组滤波支路,即5次支路3 000 kVar、7次支路2 000 kVar、11次支路1 000 kVar,配置2 000 kVar磁控电抗器。装置采用柜式结构,配有隔离开关、放电线圈、滤波电抗器、高压并联电容器、同步开关、高压喷逐式熔断器、电流互感器、避雷器、MVQC100控制器、电容器组微机保护单元和柜内照明等,装置通过总进线隔离开关进线,悬空式母排走线。每组是独立的一套单元,可以独立控制。
该装置能运用快速调节算法实现对无功的快速补偿,可有效抑制电压波动、闪变,并可减少电力系统中的谐波、负序,提高功率因数,从而起到改善电能质量,提高生产效率的作用。系统响应时间不长于20 ms(控制系统从检测到调节完成时间)。
3.1 成套装置的技术参数
成套装置的技术参数是:额定频率为50 Hz,额定电压为12 kV,装置总容量为6 000 kVar,投切级数为无级,接线形式为星形,冷却方式为自冷,控制方式为无功功率,调节方式为三相,二次控制系统工作电源为AC220 V。另外,磁控电抗器带有温度保护、瓦斯保护。
3.2 成套装置的性能特点
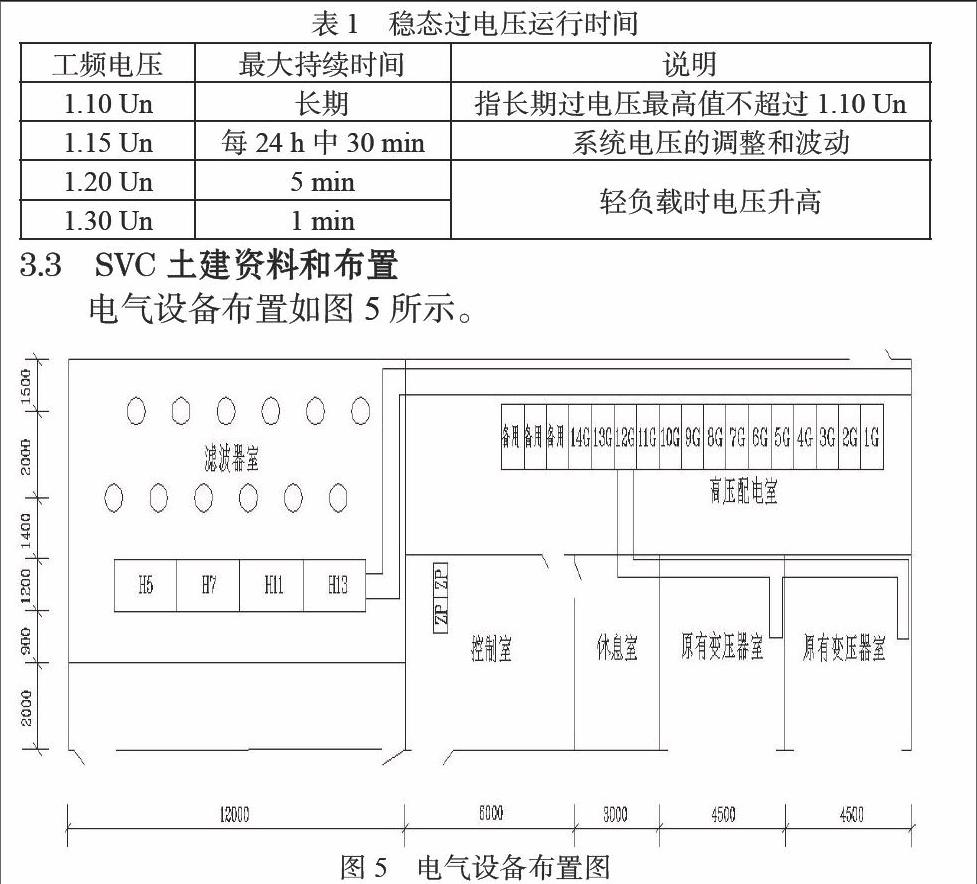
该装置可以根据电网系统无功功率和电压控制要求自动调节,无需人为干预,以实现无功功率的动态无级调节,提高供电系统的功率因数,实时功率因数在0.95以上。成套装置实时跟踪负荷变化,响应时间短于20 ms。控制系统采用全数字化智能控制,由微机实时监测、智能调节,能够实现无触点、无涌流、无过渡调节,内部无动作器件。装置的实际电容与其额定电容偏差在电容的±5%.装置的连续运行电压为1.00 Un,且能在表1所规定的稳态过电压运行相应的时间。
静止补偿器的各部件、控制屏和高低压配电装置都置于新建高压配电室内,电抗器和电容器布置在新建滤波器室内,6~ 10 kV电容器安装在直接接地的金属构架上,滤波用电抗器采用单相安装,它的磁通通过空气构成环路。为了防止其周围的钢、铁等导磁材料构件在磁场的作用下发热,而这些构件的磁化又会影响电抗器的电感,影响滤波器的调谐,所以,要求电抗器周围的一定距离内不应有铁磁材料。因此,电抗器一般不需要金属支架,其支柱绝缘子直接固定在土建基础上。
4 供电系统投入 SVC后的运行效果
供电母线投入SVC 后,总的谐波电压畸变率小于2.4%,奇次谐波电压畸变率小于1.6%,偶次谐波电压畸变率小于1.0%.10 kV母线谐波电流限值优于国标GB/T 14549—93 的规定。10 kV母线侧功率因数达到0.95以上,SVC投入的运行效果达到了预计要求。
5 结束语
在供电系统中实际应用SVC装置,为负荷提供可快速调节的无功功率补偿,能够消除高次谐波,同时,抑制谐波引起的电网电压畸变,极大地改善了供电电网的电能质量,降低了供电网电压的波动和闪变,改善了负荷的相间平衡,提高了设备运行的可靠性,大大节约了生产成本,给用户带来了良好的经济效益,具有较高的工程应用价值。
参考文献
[1]陈延镖,陆乃城,王敏杰.钢铁企业电力设计手册[M].北京:冶金工业出版社,1996.
[2]王兆安,杨君,刘进军.谐波抑制和无功功率补偿[M].北京:机械工业出版社,1998.
[3]杨晨.TCR的电气特性及控制系统[D].大连:大连理工大学,2007.
〔编辑:白洁〕
猜你喜欢
科技创新与应用(2016年34期)2016-12-23
科技创新与应用(2016年34期)2016-12-23
科技创新与应用(2016年34期)2016-12-23
山东工业技术(2016年23期)2016-12-23
科技视界(2016年23期)2016-11-04
科技视界(2016年17期)2016-07-15
科技视界(2016年7期)2016-04-01
科技视界(2016年1期)2016-03-30
