
球齿轮在车载雷达中的应用分析
2017-06-07 10:22王白王谭晓明马鹏
科技与创新 2017年10期
王白王++谭晓明++马鹏


摘 要:以渐开线球齿轮齿盘机构为研究对象,对其运动规律进行了理论分析。通过SolidWorks建模,基于ADMAS仿真环境,对该机构的运动进行了仿真分析,验证了该机构的运动规律。研究了车载雷达的相关理论,提出了将球齿轮应用在车载雷达转动机构上的新思路,分析了可能产生误差的原因,为提高车载雷达运动精度提供了新思路,对球齿轮齿盘机构在其他领域的应用也有一定的参考价值。
关键词:球齿轮;齿盘;车载雷达;转动机构
中图分类号:TH132.4 文献标识码:A DOI:10.15913/j.cnki.kjycx.2017.10.036
20世纪90年代,国防科技大学潘存云教授发明了一种新型的双自由度齿轮传动机构——渐开线球齿轮机构,它可以实现连续传动,解决了离散齿球齿轮存在的传动原理误差和难以加工的问题。该机构是一种具有2个传动自由度,可用来传递二维回转运动的新型齿轮机构,在改变机构传动方向上有独特的优势。当一个球齿轮齿数为无穷多时,其分度球半径将趋于无穷大,球齿轮机构就演变成了球齿轮齿盘机构,实现球面运动与平面运动之间的转换。球齿轮齿盘机构的运动特性满足车载雷达转动机构的要求,因此,本文将该机构应用在车载雷达上,以满足车载雷达对运动的要求。
雷达在飞机、舰艇、战车等武器装备中广泛应用,因此,提高我国雷达的性能,对增强我国的侦查、预警、识别能力等有重大意义。为了获取信息,雷达需要发出并接收反馈的信号,这对雷达的俯仰角和旋转角有一定的技术要求。球齿轮齿盘机构的传动形式比较简单,只需要对齿盘进行2个方向的输入,就可以输出相应的球齿轮的转动,且传动平稳、精度高,有利于提高其动态性能。
本文通过SolidWorks建模、ADAMS仿真,研究球齿轮齿盘机构的运动形式和规律;然后在仿真环境中向球齿轮输入设定的轨迹,以观察齿盘的运动规律;最后将齿盘的运动参數转
化为电机的转动参数,用C语言编程,控制该机构按照设定轨迹运动。
1 车载雷达转动机构原理分析
车载雷达要求雷达在使用的过程中能够快速展开,需要准确、及时地调整天线的角度,这就对转动机构提出了比较高的要求。本文采用的球齿轮齿盘机构有大范围的俯仰角,可以实现360°无死角转动。该机构所需部件少、传动形式简单、精度高,可以很好地满足这一性能指标。
1.1 渐开线球齿轮形成原理
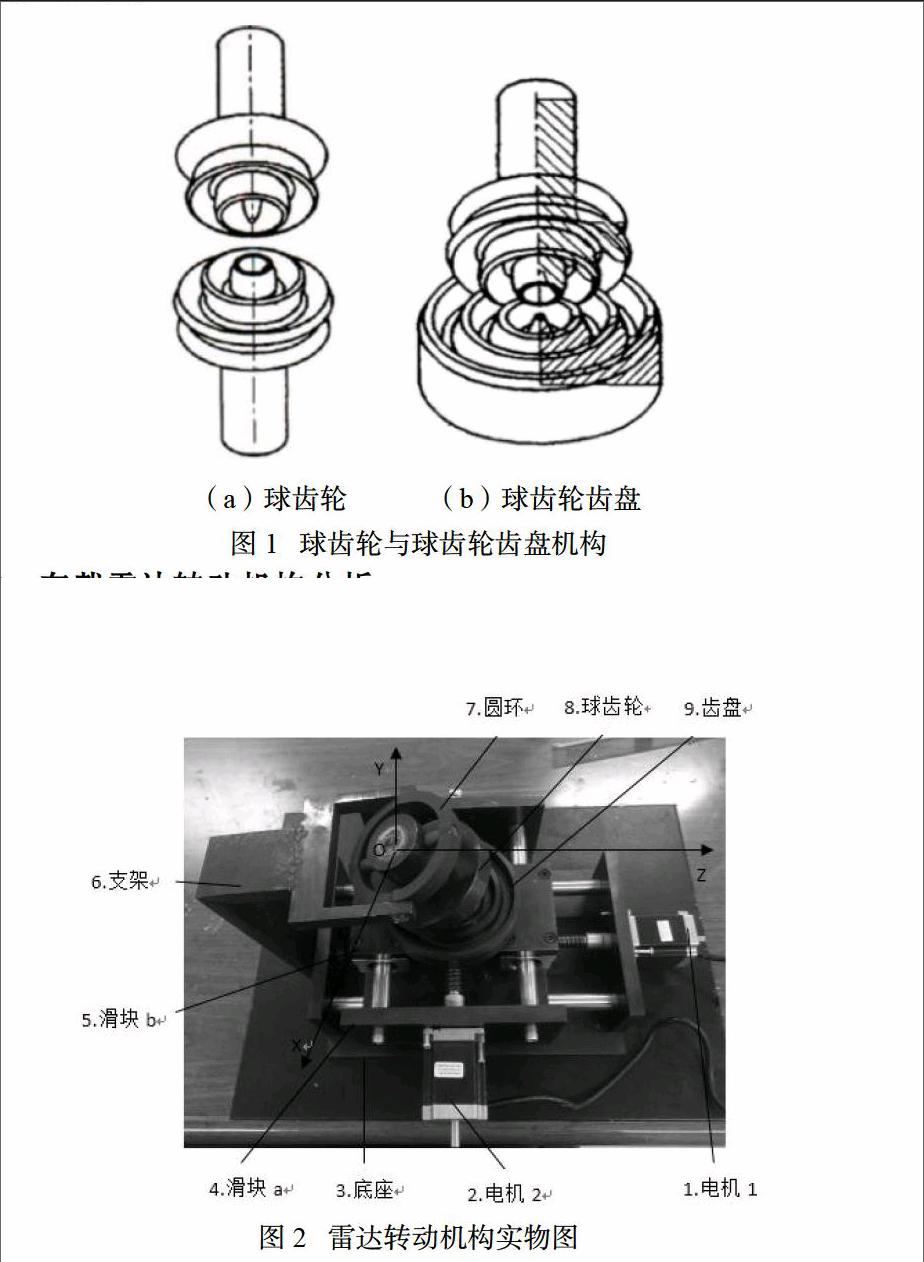
图1(a)为一对圆柱齿轮啮合,在图示位置时,两齿轮中心连线刚好与两齿轮的极轴重合。将这一对相互啮合的圆柱齿轮剖面所在的平面齿轮绕极轴旋转360°,便得到一对相互啮合的球齿轮。对于圆柱齿轮中有关的各种圆,此时全部演变为相应的球。如图1(b)所示,当其中一个球齿轮的齿数无穷多时,其分度球半径也将会趋于无穷大,则球齿轮演变成齿盘,球齿轮机构演变成球齿轮齿盘机构。其中,齿盘做平面运动,球齿轮做球面运动。该机构可以实现平面运动与球面运动之间的相互转换。
1.2 车载雷达转动机构分析
图2为车载雷达转动机构的实物图,以圆环中心为原点建立空间直角坐标系。1和2为驱动电机,3为喷泉机的底座,4为滑块a,5为滑块b,6为支架,7为圆环,8为球齿轮,9为齿盘。电机1驱动滑块a在底座上沿X轴运动,电机2驱动滑块b在滑块a上沿Z轴运动。圆环与支架铰接,球齿轮通过横轴与圆环铰接,球齿轮可以在空间内做两自由度的转动,且转动中心位于圆环的中心位置。齿盘与球齿轮啮合,且齿盘通过螺丝固连在滑块b上,齿盘随滑块b在XOZ平面内做两自由度的平动。球齿轮顶部可以加装雷达天线,跟随球齿轮一起转动。
电机通过丝杠滚珠机构驱动滑块带动齿盘与球齿轮啮合运动,将齿盘的平动转化成球齿轮的转动。向电机输入给定的参数,球齿轮带动雷达天线按照设计的轨迹运动,从而对不同方向的信号作出反馈。
1.3 雷达控制原理分析
由于车载雷达体积比较小,质量比较轻,对控制精度的要求比较高,所以,雷达收放系统、升降系统、转动系统等都可以用机电控制,使雷达在接收到信号后可以及时、准确作出反应。以智能电机伺服驱动控制器为核心的主控制单元,结合C语言编写相关控制程序,在车载雷达的操作界面设置驱动参数来控制整个雷达系统的运转。
3 车载雷达驱动机构建模
渐开线球齿轮和齿盘在ADAMS的数据库里没有标准件,直接制作比较困难,因此,可先通过SOLIDWORKS软件生成各个零部件后进行装配,然后导入到ADAMS中。
3.1 SolidWorks生成球齿轮
在具体工作中,先生成球齿轮。从设计库中选取Gb、动力传动和正齿轮设置参数,生成极薄的标准齿轮;选取其中连续的齿进行拉伸切除,截取轮齿部分再进行拉伸切除。在中间齿的标示中心线,以中心线为轴进行旋转拉伸,在末端圆面拉伸,生成球齿轮三维模型图。同理,可以生成齿盘。然后,依次生成其他零部件,比如支架、圆环、滑块、底座和雷达天线等。
3.2 ADAMS添加约束
将SolidWorks生成的零件保存为Parasolid格式,然后导入到ADAMS中,修改各个零部件的材料属性为”Steel”。然后对零部件进行连接,添加相应约束关系:底座与大地是固定副连接,滑块a与底座是移动副连接,滑块b与滑块a是移动副连接,球齿轮和齿盘是接触力连接,球齿轮和雷达天线是固定副连接,球齿轮和圆环是旋转副连接,圆环和机架是旋转副连接,机架和大地是固定副连接。图4为雷达转动机构的三维模型。
4 仿真分析
由式(1)可知,球齿轮齿盘机构的俯仰角的取值范围与齿盘的位移有关。根据式(2)、式(3),可以设计出球齿轮末端P点的轨迹,然后将运动参数输入ADAMS仿真环境进行仿真,可以得出齿盘的运动规律,继而求出电机的变化规律,用C语言进行编程控制。
4.1 螺旋运动仿真设计
设计球齿轮的运动轨迹为:①球齿轮极轴沿X轴正向偏转30°,运行2 s;②绕OY轴顺时针转动2周,同时,P点沿Y轴正方向上做匀速直线运动,最后回到原点,运行20 s。P点运动轨迹如图5所示。
用ADAMS输入P点的运动轨迹,采用一般驱动进行仿真运动,可以得到齿盘在X轴和Z轴上的运动轨迹曲线。
图6和图7分别是齿盘在X轴和Z轴上的运动轨迹仿真曲线和理论计算曲线,其中,一条曲线是理论值,一条曲线是仿真值。
4.2 仿真结果分析
从图6和图7中可以看出,齿盘在X轴和Z轴上轨迹的理论曲线与仿真曲线几乎重合。这说明,两者偏差比较小。经过计算,X轴上理论值与仿真值最大偏差为0.56 mm,Z轴上最大偏差为0.71 mm,满足车载雷达运动控制精度要求。因此,本文所建立的模型是有效的,验证了该机构应用在车载雷达上可以满足雷达转动时的俯仰角和方位角要求。在此过程中,出现误差可能是因为ADAMS的装配过程中产生了误差,也可能是对球齿轮和球齿盘相关数据录入时不够精确导致的。因此,基于本文的模型,通过更改相应的模型参数,能够设计出不同尺寸的雷达转动机构,并将其应用在车载雷达上。
5 结束语
本文提出了一种基于球齿轮齿盘传动的车载雷达转动机构,建立了该机构的运动学模型,求出了球齿轮齿盘机构的运动规律。通过ADAMS仿真实验,验证了模型的有效性,为车载雷达运动控制提供了理论基础。结合实体雷达的相关参数,设计雷达天线轨迹,反求出了伺服电机的变化规律,为C语言编程控制电机驱动雷达转动提供了依据。
参考文献
[1]潘存云,尚建忠,杨昂岳,等.球齿轮机构及其应用[J].机械科学与技术,1997(01):43-45.
[2]潘存云,温熙森.渐开线环形齿球齿轮传动原理与运动分析[J].机械工程学报,2005(05):1-9.
[3]陈蜻.车载火控雷达结构造型设计[J].火控雷达技术,2010(04):14-18.
[4]刁世伦,王鹏飞.基于车载雷达天窗与升降机构机电控制系统设计[J].电子技术与软件工程,2015(08):170.
[5]李强,潘存云,徐小军,等.基于球齿轮传动的星载天线定位机构星间通信运动学研究[J].国防科技大学学报,2011(06):145-149.
〔編辑:白洁〕
