车辆防碰撞Carsim/Simulink仿真研究
2017-06-05 14:58:00杨丹,杜钊,徐彬
电气电子教学学报 2017年1期
杨 丹, 杜 钊, 徐 彬
(东北大学 信息科学与工程学院, 辽宁 沈阳 110819)
车辆防碰撞Carsim/Simulink仿真研究
杨 丹, 杜 钊, 徐 彬
(东北大学 信息科学与工程学院, 辽宁 沈阳 110819)
本文以国家大学生创新性实验为背景,以车辆防碰撞仿真研究为例,介绍了利用Carsim/Simulink联合仿真的一般步骤,阐述了Carsim/Simulink联合仿真在实践教学中的可行性和实用性,文中的实例为学生在实际问题中的算法研究与系统实现起到了有效的示范和说明作用。
国家大学生创新性实验;车辆防碰撞;Carsim/Simulink联合仿真
0 引言
“国家大学生创新性实验计划” 是高等学校本科教学的重要组成部分,旨在提高学生的专业素养与各方面的能力,调动学生的积极性与创造性,激发学生的创新思维与创新意识[1]。
笔者于2015年成功申请了“车辆防撞预警系统的设计与实现”的国家级大学生创新实验项目,开展面向实际问题的实践教学工作,期望探索一种有效培养学生对实际工程问题分析、处理能力的教学方法。
本文结合该创新实验项目,就基于Carsim/Simulink联合仿真的车辆防碰撞系统建模展开讨论,并介绍一种从模型、算法到系统的虚拟仿真平台的实践过程。
1 车辆防碰撞预警思路
图1为车辆在十字路口处发生碰撞的一种情况,如果能够提前给驾驶员发出消息,做出行进的调整则很有可能阻止这类碰撞的发生。
本次创新实验项目立足于十字路口处,两车的防碰撞系统建模。车辆行驶到交通十字路口时,车辆可能直行、左转、右转,不同的行动将影响车辆的行驶轨迹。本设计采用基于碰撞时间和防碰撞时间的差值的防碰撞预警机制[2]。
图2所示为任意交叉路口两车行车场景。图中,(x1,y1)表示车辆1当前位置,v1、θ1表示车辆1的速度及方向;(x2,y2)表示车辆2当前位置,v2、θ2
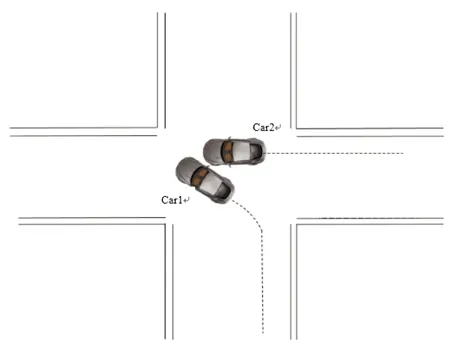
图1 两车在十字路口碰撞的一种情况
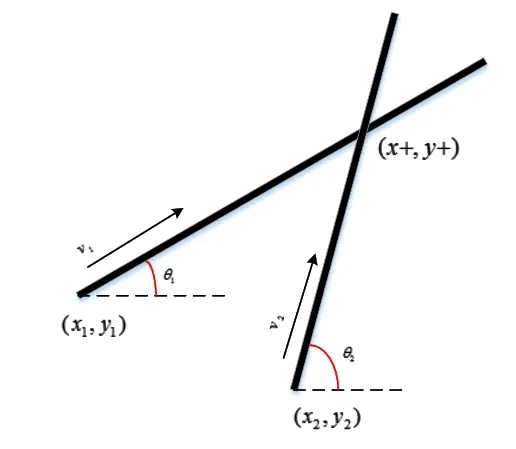
图2 任意交叉路口场景
表示车辆2的速度及方向。(x+,y+)表示可能的碰撞点。
建模的具体步骤:
(1)根据两辆车辆状态,预测轨迹,估计可能的碰撞点(x+,y+);
(2)根据车辆自身状态信息(位置,速度,转向角)分别计算出两车辆到达碰撞点时间TTX ( time to intersection);
(3)如果不同车辆的TTX相差很小,认为有碰撞可能,估计碰撞点的时间TTC (time to collision);
(4)根据受驾驶员的反应时间、车辆制动的敏捷性计算出防撞时间TTA(time to avoidance);
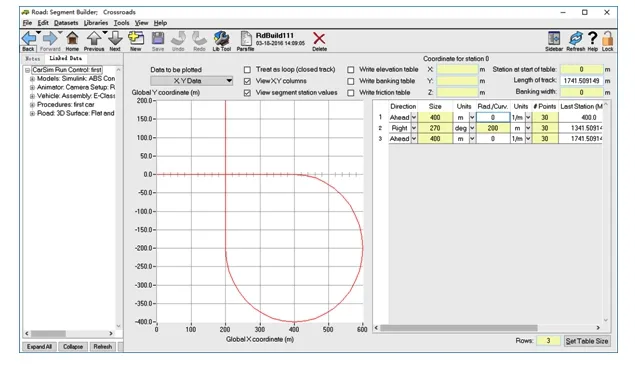
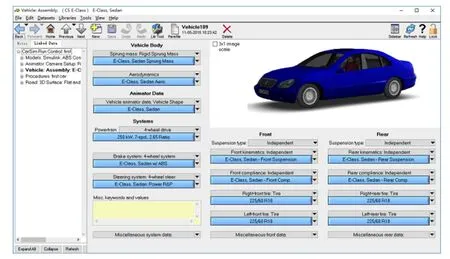
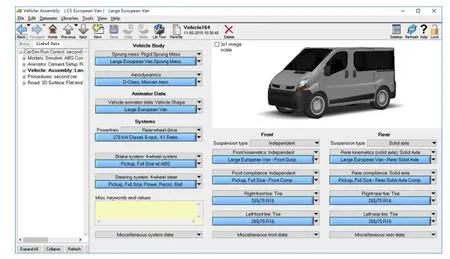
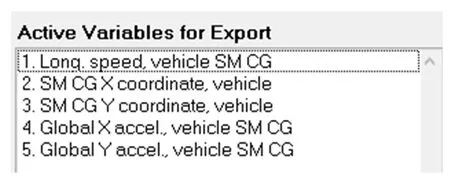
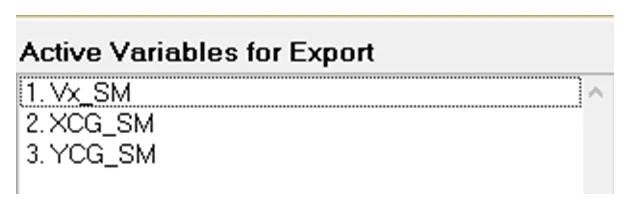
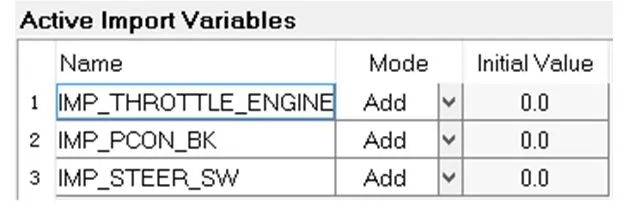
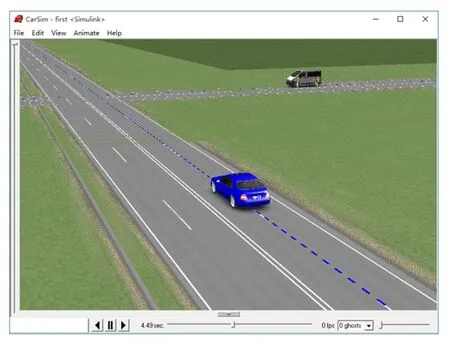
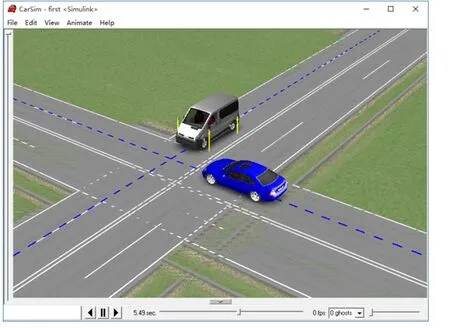
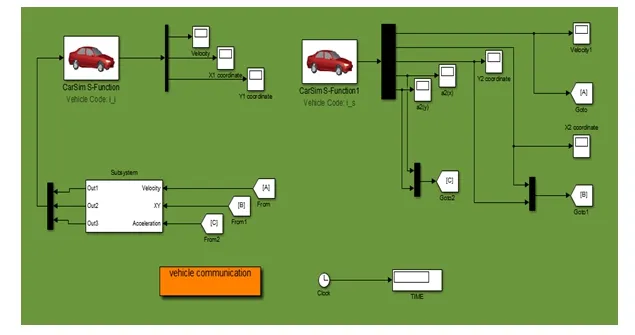
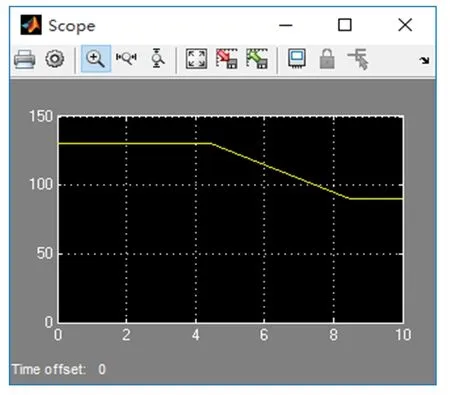
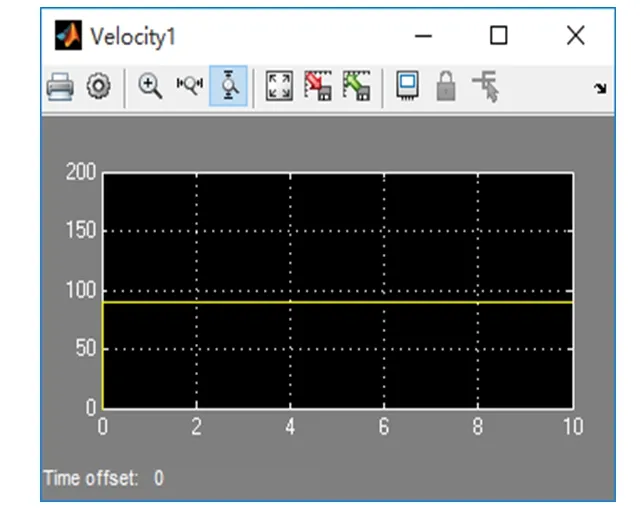
(5)比较两车辆的TTX1、TTX2是否同时等于碰撞时间TTC,并且当TTC-TTA Carsim软件是由Mechanical Simulation Corporation公司开发的一款针对车辆动力学的仿真软件,采用面向特性的参数化建模手段,通过数学模型来表现车辆的特性[3]。Carsim的模型创建包括: miscellaneous data(包括道路模型、开闭环车辆控制模型等)、test specification(包括车辆配置和模拟驾驶员控制)、Run control with Simulink(包括系统输入输出参数、开始与停止时间及位置)三部分。基于本项目的设计需求,具体建模过程如下: 2.1 道路交通模型建立 在主界面Miscellaneous Data中,选择Roads:3D surface,创建新数据库(new dataset),将标题(Title for new dataset)命名为“Flat and Long”。 在“Flat and Long”数据库中,设计道路模型,将各数据库组装成一个可动画演示的三维路面描述架构,如图3所示。 图3 道路模型设计界面 (1)几何尺度设置(Geometry):在中心线高度(Centerline elevation)选项下创建数据库“Flat”,设“Constant Centerline elevation”值为0米,即中心线高度设置为平面。在分段建立路面(Centerline geometry: Road segment builder)选项下创建数据库“Crossroads”。其几何设计采用分段建立的方法:将(0,0)到(400,0)绘制为直线;(400,0)到(200,-200)绘制为四分之三圆;(200,-200)到(200,200)绘制为直线,全程路线约为1742米。绘制信息如图4所示。 图4 道路模型中心线绘制信息 (2)道路摩擦系数(Friction):项目建模中,将道路模拟成光滑混凝土。创建数据库“constant Mu”,设“Constant Friction coefficient”为0.85,即滑动摩擦系数设置为0.85,并设“Rolling resistance”值为1.0,即滚动阻力设置为1.0。 (4)动画演示参数(Animator Support):在Update Shapes选项下创建数据库“Road Builder: Crossroads”,设置道路为双行双车道,宽度共8米,起始位置0米,终止位置1750米。 2.2 车辆控制模型 在主界面Test Specifications中选择Vehicle configuration与 Procedure选项进行设计。 (1)车辆配置(Vehicle Configuration):1号车Car1选择数据库“E-Class, Sedan”,2号车 Car2选择数据库“Large European Van”,其车身、动力系统等配置选用Carsim vehicle库中的模型。1号车E-class, Sedan如图5所示,2号车Large European Van如图6所示。 图5 Car1模型 图6 Car2模型 (2)车辆程序设置(procedures):创建Car1数据库first car;创建Car2数据库second car。两辆车分别设置速度为130千米/小时与90千米/小时,换挡控制设置为闭环,两辆车直线行驶,Car1从位置0米移动到位置400米,Car2从位置1400米移动到位置1600米。 2.3 仿真控制模型设置 在软件Carsim主界面中选取命令Run Control with Simulink下选择Models: Simulink,控制器选择ABS控制系统。Car2为无驾驶意图的车辆,Car1为有驾驶意图的车辆。Car2无输入参数,输出参数包括车辆实时的速度、在地图上的XY坐标、XY方向的加速度,其输出参数,如图7所示。 图7 Car2输出参数 Car1输入参数包括车辆刹车控制、油门控制、车辆转向控制,分别对应车辆的加速、减速或停止、转向,如图8所示。输出参数包括车辆速度、在地图上的XY坐标,用来检测车辆的防碰撞系统是否合理,如图9所示。 图8 Car1输入参数 图9 Car1输出参数 另外,在主界面设置Car1起始时间与停止时间分别为0 s和10 s,起始位置与停止位置分别为0米和400米。Car2起始时间与停止时间分别为0 s和10 s,起始位置与停止位置分别为1400米和1600米。两车互相添加关联,即在Overlay animations and plots with other runs选项添加另一辆车。 通过上述Carsim软件建模后,先点击按钮Run Now,再点击Animate观看车辆及道路建模效果,根据动画效果判断参数设置是否满足仿真需求,分别截取车辆启动及在十字路口相遇的效果,分别如图10和图11所示。 2.4 与Simulink联合仿真 通过Carsim的“Send to Simulink”,将建模的道路及车辆送入Simulink进行控制算法的联合仿真。 图10 车辆启动行驶模拟动画 图11 车辆十字路口相遇模拟动画 Carsim的所有信息被封装在S-Function中,而后对Car2数据进行采集并将数据传输到防碰撞系统进行轨迹预测与防碰撞预警。当两车之间的相对距离小于安全距离,通过对Car1减速、加速或转向达到防碰撞的目的。并通过示波器检验、评估算法合理性。具体设计如下: 设计goto模块A对Car2速度进行提取,模块B对Car2的位置即XY坐标进行提取,模块C对加速度在X、Y方向上的分量进行提取。用示波器velocity1对Car2速度进行检测,示波器X2 coordinate、Y2 coordinate对位置进行检测,示波器a2(x),a2(y)对加速度在X、Y方向上的分量进行提取。利用From模块A、B、C分别将Car2的速度、位置与加速度传输到subsystem子系统。subsystem分析数据,改变Car1的刹车、油门、与方向盘行动,使车辆之间不会发生碰撞。并用示波器Velocity对Car1速度进行监控,示波器X1 coordinate、Y1 coordinate对位置进行监控。所述如图12所示。 Car1行驶速度为130 km/h,Car2行驶速度为90 km/h。对于Car1,当与Car2的距离小于安全距离时,通过不到4 s,减速到80 km/h,从而避免碰撞。Car1和Car2的速度示波器显示分别如图13和图14所示。 图12 Carsim与Simulink联合仿真 图13 Car1速度坐标图 图14 Car2速度坐标图 本文所探讨的车辆防碰撞实例,需要学生使用两种仿真的工具软件Carsim和Simulink。其中Carsim主要用于车辆道路模型建模,Simulink主要用于控制算法仿真。项目实施过程中,不但要求学生具有扎实的专业基础理论知识,还要求掌握较强的计算机仿真应用技术;在实验中遇到许多实际问题,学生会带着实际问题请教指导教师,查阅相关书籍,学习相关知识。通过参与本实践项目,三名参与学生初步具备了基础的科研素养,提高了发现问题、分析问题和解决问题的能力,同时也培养了学生们的团队合作精神。 本文介绍了在大学生创新项目的背景下,通过Carsim建模技术仿真建模的一般步骤;针对车辆防碰撞系统的实例,遵循由需求分析到仿真实践,由单元模型到系统构成的思维过程。目前项目已由仿真研究进入到系统实现阶段。Carsim建模技术,对于学生深入认识车辆特性起到了积极作用,整个案例的仿真研究为学生后续实践中从事相关方面的研究及工作打下良好的基础。本文对整个防撞预警系统作了简化处理,在实际应用当中,还需考虑工作环境、交通条件等额外的状况;开展三辆或者三辆以上的驾驶系统的联合防撞进一步研究。 [1] 乔连全。我国研究型大学“大学生创新性实验计划”的现状与反思[J].武汉:高等教育研究,2011.32(3):81-87 [2] S.Tak, S.Woo, and H. Yeo. Sampling-based Collision Warning System with Smartphone in Cloud Computing Environment, 2015 IEEE Intelligent Vehicles Symposium(IV),June 28-July 1,2015,COEX,Seoul, Korea,1181-1186 [3] Mechanical Simulation Corporation: Carsim Reference Manual, Version 6.03, July ,2005 Carsim/Simulink Simulation Research for Vehicle Avoiding Collision Warning YANG Dan, DU Zhao, XU Bin (SchoolofInformationScienceandEngineering,NortheasternUniversity,Shenyang10819,China) Under the background of National College Students Innovation Experiment, this paper introduced the basic steps of CARSIM/SIMULINK Joint Simulation by the case of vehicle collision warning simulation, and expounded the feasibility and practicability of the Carsim/Simulink joint simulation in the practice teaching. The example presented has the effective demonstration and significant explanation for the students in the actual problem algorithm research and system realization. national college students innovation experiment; vehicle collision warning; Carsim/Simulink joint simulation 2016-03-23; 2016-09- 19 杨 丹(1979-),女,博士,讲师,主要从事信号检测、建模及应用方面的教学和研究工作,E-mail:yangdan@mail.neu.edu.cn TP399 A 1008-0686(2017)01-0143-052 Carsim/Simulink联合仿真

3 案例总结
4 结语
猜你喜欢
当代陕西(2022年4期)2022-04-19 12:08:50
小猕猴学习画刊(2022年3期)2022-03-28 16:33:01
青年歌声(2020年12期)2020-12-23 06:30:00
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14 07:36:02
电子制作(2018年17期)2018-09-28 01:56:44
通信电源技术(2018年5期)2018-08-23 01:15:36
电子制作(2017年13期)2017-12-15 09:00:08
电子制作(2017年20期)2017-04-26 06:57:46
读写算·高年级(2015年1期)2015-07-25 02:22:00
现代防御技术(2014年6期)2014-02-28 18:26:29