卫星编队自主相对导航与通信一体化系统探讨
2017-06-05 15:10王春锋
深空探测学报 2017年1期
王春锋
(中国空间技术研究院 钱学森空间技术实验室,北京 100094)
卫星编队自主相对导航与通信一体化系统探讨
王春锋
(中国空间技术研究院 钱学森空间技术实验室,北京 100094)
探讨了一种新的卫星编队自主相对导航与通信系统一体化系统设计方案,提出了基于软件无线电的半双工CDMA测量通信一体化系统,实现自主相对导航和星间通信的一体化功能,通信数据和导航测量数据也统一在一个数据帧中传输,不需要独立的星间网络通信系统和增加额外的通信频段进行通信数据传输。系统采用S波段,详细阐述了系统架构和工作原理,分析了系统性能,并进行了仿真验证。
卫星编队;相对导航;自主导航;导航通信一体化;GNSS
0 引 言
导航通信一体化技术在空间和水下探测中有着重要应用,卫星导航通信一体化技术的核心是测量和通信的一体化,一般包括射频测量通信一体化技术[1]和激光测量通信一体化技术[2-3],而射频测量通信一体化技术就是要在同一信道上实现测距与通信功能,目前的研究还比较少,尤其是针对卫星编队应用的自主导航与通信一体化系统。
卫星编队可以完成单个卫星无法完成的各种空间任务,在深空探测、对地观测等领域有不可替代的作用。卫星编队系统是卫星未来发展的方向之一。
在卫星编队中,由于卫星的加入和离开、编队重构等,卫星相对位置变化比较大,尤其在编队形成和重构时变化相对频繁,卫星编队飞行需要考虑卫星空间相对运动、多普勒效应,围绕地球的卫星编队还要考虑卫星受轨道约束等,所以卫星编队在控制、导航、数据处理方面更为复杂[7-9]。
卫星编队相对导航技术和星间通信网络技术是实现卫星编队飞行的两个关键技术。目前卫星编队的相对导航和通信系统一般都是独立的两个系统,且传统的基于载波相位差分GNSS方法由于依赖导航星座有其应用的局限性,如果能设计一种相对导航和星间网络通信一体化的系统,在功耗和重量上都有很大的优势,所以研究卫星编队自主相对导航和通信一体化方法有着重要的意义。
本文第1节分析了卫星精确编队任务过程的分解,以及卫星编队对自主相对导航的测量条件要求;第2节探讨了基于软件无线电的测量通信一体化系统架构和工作原理;第3节进行了软件仿真和分析;第4节给出了结论。
1 卫星编队任务分析及通信和测量要求
航天器精确编队任务过程可以分3个阶段:编队初始部署阶段,主要任务是航天器的邻居发现,进行航天器之间通信连接建立;编队捕获阶段,即编队任务发现,航天器向目标编队飞行方式运动,主要实现航天器避免碰撞等任务实现,这个阶段是粗测量相对导航过程;编队维护,即在航天器飞行过程中保持精确编队队形,这个过程是精确测量相对导航过程。在初始部署阶段,航天器之间可能被分开相隔很远的距离,一些航天器可能超出其他航天器的通信范围。在编队捕获阶段,航天器向目标编队方式进一步运动,最终发现其他航天器。在编队维持阶段,所有飞船是精确编队的连接方式,通过精确测量维持编队运行。
在卫星编队飞行过程中,编队拓扑重构、编队保持和编队维护都要进行卫星网络的拓扑控制,在卫星编队构形变化和飞行过程中需要保持卫星网络的连通性。卫星编队过程如图1所示。
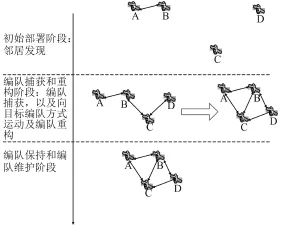
图1 卫星编队过程Fig.1 Process of satellite formation
在卫星编队飞行过程中,通过精确测量,进行卫星相对位置和速度的解算,进行相对运动的精确描述和控制,以维持精确编队运行。相对运动包括相对轨道运动和相对姿态运动控制。卫星运动的6个轨道根数为:半长轴a,轨道倾角i,轨道偏心率e,升交点赤经Ω,近地点幅角ω,平近点角M。相对轨道运动最常用的方法就是Clohessy-Wiltshire方程[9](即C-W方程),卫星Si对于参考星Sc的相对运动方程如下:
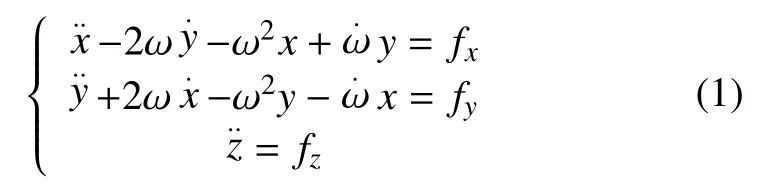
其中:ω为卫星Si的轨道角速度;x,y,z为相对运动矢量在卫星Si的轨道坐标系中的投影;fx,fy,fz是主动控制或摄动力的分量。
2 系统架构及工作原理
2.1 系统架构
系统采用软件无线电系统架构,系统功能框图如图2所示。系统包括发送信道、接收信道、频率合成器、信号发送处理模块、信道接收处理模块。系统采用S波段,使用2.2 Ghz频率,实现基于CDMA方式的测量与通信一体化集成系统,采用半双工通信机制,把测量导航数据和通信数据在一个数据帧发送传输。信号的产生和处理是通过一个可编程的微处理器基于软件方法来完成。系统采用GPS C/A码作为伪随机码(PRN),码片速率为1.023 Mcps(1.023×106码片/秒),码长度为1 023,C/A码周期比P码周期短很多,所以搜索和捕获C/A码的时间要比P码快很多。
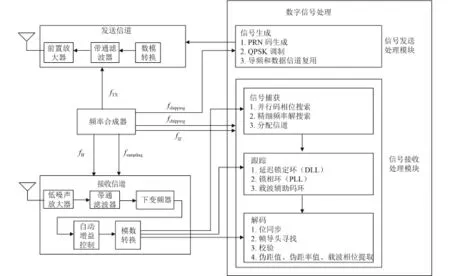
图2 基于CDMA的测量导航与通信一体化系统架构Fig.2 Integrated system architecture of measurement navigation and communication based on CDMA
1)频率合成器功能模块
频率合成器可以产生发送频率Jtx,中频信号(IF)JIF,采样速率Jsamping,以及码率速率Jchipping。
2)发送信道
包括前置放大器(PA)、带通滤波器(BPF)、数模转换(DAC)。完成生成载波和伪随机码调制的信号。
3)接收信道
包括低噪声放大器(LNA)、带通滤波器(BPF)、下变频器(Down conversion)、自动增益控制(AGC),以及模数转换(ADC)。
4)信号发送处理模块
包括生成伪随机码、信号调制、导频和数据信道复用。
5)信号接收处理模块
包括信号捕获、跟踪和解码。信号捕获完成并行码相位搜索,精细频率解搜索,信道分配。跟踪完成延迟锁定环(DLL)、锁相环(PLL)、载波辅助码环。解码完成位同步、帧头寻找、校验、伪距、伪距率、相位提取。最终实现数据恢复和伪距解算。
2.2 信号捕获
信号捕获过程是一个在两维搜索空间上对多普勒频移和码相位估计值的全局搜索过程。码和频率一维搜索使用快速傅立叶变换(FFT)实现。在捕获后,切换到延迟锁定环(DLL)和锁相环(PLL),它可产生码和载波相位连续变化的精细估计,跟踪由于卫星之间动态轨道运动产生的变化。通信比特可从跟踪环提取,之后完成伪距解算。
2.3 测量过程
在卫星运动过程中,有编队捕获阶段和编队维护阶段。编队捕获阶段是粗测量过程,粗测量过程使用码测量,测量精度为米量级,测量历程时间进度如图3所示,其中初始化时间包括了同步和捕获过程;编队维护阶段是精确测量过程,精确测量过程使用相位测量,测量精度为厘米量级,测量历程时间进度如图4所示,其中初始化时间包括了同步、捕获、整模糊度解算,以及多径纠错过程,时间约分钟量级。

图3 码测量历程Fig.3 Code measurement processes
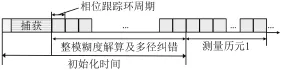
图4 相位测量历程Fig.4 Phase measurement
2.4 时间同步问题
系统要求在卫星编队之间实现精确的同步,采用动态双向时间同步算法实现。当进行同步的两颗卫星A和B同时向对方发射时间同步信号,若卫星A、B互发定时信号的频率接近,链路对称,传播时延近似相等,同时忽略其他时延的影响时,即可求得两个卫星钟差Δt。采用这种方法对两两之间的卫星钟差Δt进行调整,即可保持精确的同步。
2.5 相对导航过程
测量过程中,码字测量和相位测量采用不同的初始化同步方式。码字测量的初始化仅需要捕获过程,而相位测量的初始化过程中还包括整周期模糊度解算和多径纠错过程,所以相位测量初始化需要更长的时间。采用扩展的卡尔曼滤波器来消除相对位置误差,这个过程使用了数值积分方案,并从前一个循环的插值获得估计的相对位置状态矢量,基于ti和ti+ 1之间所有测量,可以得到表示轨迹的一个连续多项式,作为下一次滤波更新的输入值和轨道预测[4]。此外传输时延或周期(propagation period)越小则相对状态矢量估计越好。
2.6 相对导航共享和通信一体化实现
两个相邻卫星的位置进行捕获和跟踪,完成后建立通信链路,进行数据传输,发送测距信息到多方进行相对位置判定,实现导航信息共享。由于卫星在预定的轨道上运行,其空间位置可通过轨道预报得到。因此,一颗卫星捕获另一颗卫星(目标卫星)可采用在较小的预定空域内进行扫描搜索的模式。首先测量确定卫星的空间位置和姿态,然后计算出星间天线沿目标卫星运行轨迹的指向角度,程序控制天线跟踪目标卫星。待所有卫星均至少与一颗卫星保持连结状态时,则进入编队捕获模式。最终,有一颗卫星被选作中心星,执行时钟周期参考、相对导航、编队控制等功能。整个卫星编队实现中心型拓扑结构。此时系统中所有的卫星显示为连结完成状态,则所有卫星自动进入编队保持模式,同时传输导航共享信息和通信数据信息。
3 系统仿真与分析
3.1 卫星节点数与通信距离关系分析与仿真
为了对半双工CDMA通信与导航一体化系统进行性能验证,利用MATLAB和卫星工具开发包STK的轨道参数要求设计2~20颗卫星的组网方案。卫星轨道所在高度为6 375 km。卫星发射节点按照指定的泊松分布模型产生给定包格式的数据包,并由发射天线进行信号放大和发射。天线波束宽度为45°的射频天线。传输信道采用加性高斯白噪声信道。发射机损耗及接收机损耗均为2%,传输波长为2.2 GHz,频率间隔为9.5 MHz,采样速率为38.19 MHz,发射功率为2 W,CDMA数据码重为3,帧长为1 000。如果采用C/A码进行相位测量,可采用帧长为1 500 bit,播送速率为50 bit/s,发送一个帧需要30 s。每个帧导航电文包括5个子帧,每个子帧由10个码字组成,每个码长为30 bit。由于系统的噪声主要是接收机电噪声的影响,其噪声幅度服从高斯分布,因此信道模型采用AWGN信道。系统的误码率表达式为
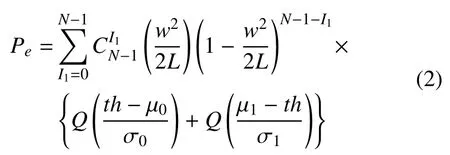
其中:w为判决码重;th为判决门限;L为传输距离;u0和u1分别为接收0和1时的电平;σ0和σ1分别为发送信号“0”和信号“1”时的噪声方差;Q为概率密度函数。
仿真结果如图5、6所示。图5显示了星间平均距离d分别选取1 km、2 km、5 km三种情况时,误码率随着卫星个数增加而变化的情况。由于CDMA系统具有软容量特性,因此在CDMA卫星编队系统中,用户数的增加相当于背景噪声的增加,造成系统性能的下降。图6显示当用户数为5、10、20三种情况时,误码率随通信距离变化的情况。随着星间距离的增加,信号的接收信噪比变小,因此误码率会进一步上升。
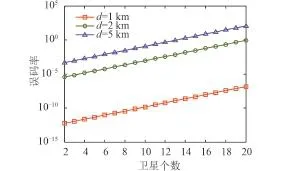
图5 系统误码率与卫星个数的关系Fig.5 Relationship between the system error rate and the number of satellites
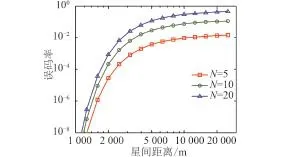
图6 系统误码率与传输距离的关系Fig.6 Relationship between system error rate and transmission distance
3.2 多普勒频移分析与仿真
在卫星编队过程中,当卫星与卫星之间存在相对运动时,接收端收到的发射端载频会发生多普勒频移。如果多普勒频移过大,会导致通信中发射和接收的频率不一致,从而使得加载在频率上的信号无法正确接收。此外,对于CDMA系统,多普勒频移会影响频率之间的互相关性。由于CDMA系统要求强的自相关性和弱的互相关性,当无多普勒频偏时,最强互相关系数为–24 dB,平均互相关系数为–30 dB;多普勒频偏存在时,互相关系数会恶化为–21.1 dB。文献[5]指出:轨内星间链路的多普勒频移基本为零;轨间同层高度星间链路的多普勒频移大致呈正弦变化,变化周期为轨道周期的一半;轨间不同高度星间链路的多普勒频移有不同的变化,例如铱星星间链路的多普勒频移变化范围约为± 190 kHz,频移值比较大;中轨卫星频移变化范围相对较小,约为± 21 kHz。
对于CDMA系统,节点数N与多普勒频移之间存在下列关系(参见文献[6]):

其中:R是卫星与最远的第一个卫星的距离;L是相邻两卫星之间的距离;W是频谱宽度;n为伪码长度;Tc为码元间隔;γmin为系统要求的最小信噪比。在仿真中,组网卫星数N分别取N=10和N=8两种情况,R=10 km,L=1 km,W=40 MHz,n=511,γmin=10 dB,仿真结果如图7所示。
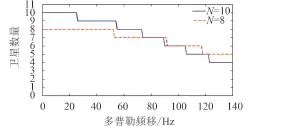
图7 卫星编队多普勒频移分析Fig.7 Analysis of Doppler shift on the system
4 结 论
本文分析了卫星编队的任务分解过程以及对相对导航的要求,探讨了自主相对导航与通信一体化系统方案,设计了基于软件无线电的卫星编队测量与通信的一体化系统,采用半双工CDMA的伪距和相位测量方法,阐述了系统架构、设计原理,说明了测量与相对导航过程,以及导航共享和通信实现过程。该方案实现卫星编队的自主相对导航,不依赖卫星导航星座,基于半双工的CDMA方法把导航和通信数据集成在一起,不再需要独立的星间链路传输导航测量数据,在功耗、重量等方面更有优势。
[1]罗续成.编队飞行航天器的测量通信一体化系统––射频收发器[J].飞行器测控学报,2006,25(2):1-8.Luo X C.RF transceiver:an integrated sensing and telecommunications system for formation flight spacecraft[J].Journal of Spacecraft TT&C Technology,2006,25(2):1-8.
[2]刘阳,温冠宇.空间探测中测距与通信一体化研究[J].无线光通信,2014,38(12):42-44.Liu Y,Wen G Y.Study on space target detection and measurement integration of communication[J].Hans Journal of Wireless Communications,2014,38(12):42-44.
[3]赵馨,牛俊坡,刘云清,等.导航卫星中激光通信/测距一体化技术及链路特性分析[J].激光与光电子学进展,2015(6):79-85.Zhao X,Niu J P,Liu Y Q,et al.Laser communication/ranging integrated technology and link characteristics in navigation satellite system[J].Laser & Optoelectronics Progress,2015(6):79-85.
[4]Sun R,Guo J,Gill E,et al.Characterizing network architecture for intersatellite communication and relative navigation in precise formation flying[J].Iaria,2011,27(1):21-36.
[5]王克锋,何翔宇,赵洪利.卫星星间链路多普勒频移仿真[J].无线电工程,2007,37(3):36-38.Wang K F,He X Y,Zhao H L.The simulation of doppler shift in intersatellite links[J].Radio Engineering,2007,37(3):36-38.
[6]苏小敏.多普勒频移对CDMA系统信道容量影响的分析[J].火控雷达技术,2009,38(1):81-83.Su X M.Analysis of doppler shift effect on channel capacity of CDMA system[J].Fire Control Radar Technology,2009,38(1):81-83.
[7]Kapila V,Sparks A G,James B,et al.Spacecraft formation flying:dynamics and control[C]// Proceedings of the American Control Conference.San Diego,California:[s.n.],1999.
[8]Moshtagh N,Mehra R,Mesbahi M.Topology control of dynamic networks in the presence of local and global constraints[C]//IEEE International Conference on Robotics and Automation Anchorage Convention District.Anchorage,Alaska,USA:IEEE,2010.
[9]Alfriend K T,Vadali S R,Gurfil P,et al.Spacecraft formation flying:dynamics,control and navigation [M].Oxford: Butterworth-Heinemann: 2009.
王春锋(1966– ),男,博士,高级工程师。主要研究方向:空间信息网络。
通信地址:北京市海淀区友谊路104号院5142信箱222分箱(100094)
电话:18910739578
E-mail:jessen-wang@163.com
Discussion on Autonomous Relative Navigation and Communication Integrated System for Satellite Formation
WANG Chunfeng
(Qian Xuesen Laboratory of Space Technology,China Academy of Space Technology,Beijing 100094,China)
In this paper, a new design for relative navigation and communication system integration system was discussed, and a relative measurement and communication integration system of half duplex CDMA based software radio was proposed to realize the integration of relative achieve navigation and inter-satellite communication, and the communication data and navigation measurement data were transmitted in one data frame, sothe new system did not require a separate inter-satellite communication and extra frequency.The system architecture and working principles were described in detail.The system performance was analyzed, and the simulation was done.
satellite formation;relative navigation;autonomous navigation;navigation and communication integration;GNSS
TN929.12
:A
:2095-7777(2017)01-0038-05
10.15982/j.issn.2095-7777.2017.01.006
王春锋.卫星编队自主相对导航与通信一体化系统探讨[J].深空探测学报,2017,4(1):38-42.
Reference format:Wang C F.Discussion on autonomous relative navigation and communication integrated system for satellite formation [J].Journal of Deep Space Exploration,2017,4(1):38-42.
[责任编辑:高莎,英文审校:朱鲁青]
2016-11-01
2017-01-10
猜你喜欢
军事文摘(2023年5期)2023-03-27
国际太空(2022年7期)2022-08-16
空间科学学报(2020年3期)2020-07-24
国际太空(2019年9期)2019-10-23
国际太空(2018年12期)2019-01-28
国际太空(2018年9期)2018-10-18
北京航空航天大学学报(2017年3期)2017-11-23
测绘科学与工程(2017年3期)2017-08-16
测绘科学与工程(2017年4期)2017-05-25
海军航空大学学报(2015年4期)2015-02-27