地面力学参数综合测试系统设计与试验
2017-06-05 15:08赵家丰沈晨晖张晓良
农业机械学报 2017年5期
汪 伟 赵家丰 沈晨晖 张晓良
(军械工程学院火炮工程系, 石家庄 050003)
地面力学参数综合测试系统设计与试验
汪 伟 赵家丰 沈晨晖 张晓良
(军械工程学院火炮工程系, 石家庄 050003)
为了改进贝氏仪不依赖大型设备时测试范围的局限性和地面力学参数测试手段的分散多样性,设计了一种室内外两用的地面力学参数综合测试系统。测试系统贯入、扭转过程互不干涉,实现测试及数据处理的独立性。可选择电动机驱动或手动驱动。借助丝杠升降机传动,仪器具有较高的运行控制精度和测试量程。系统借助拉线位移传感器和力、扭矩传感器可实时同步获取纵深行进动态信息、土壤承压力和土壤抗剪切力等信息,可实现计算机远程控制和数据采集记录及处理自动化。实验室压实制备湿润砂土,通过剪切盘剪切试验得砂土内聚力为3.14 kPa,内摩擦角为38.2°;通过压板试验得砂土变形指数为0.963,粘聚变形模量为178.73 kN/mn+1,摩擦变形模量为11 908.40 kN/mn+2。试验表明,该仪器具有较高的可靠性和实用性。
地面力学; 土壤参数; 测试系统; 承压特性; 剪切特性
引言
土壤承压、剪切问题属于农业工程领域中的重要问题,土壤机械压实、车体下陷深度、车辆行驶阻力与土壤承压剪切特性密切相关[1-2]。
贝氏仪以经典土力学公式为基础,借助加载扭转机构与测量系统获取土壤承压、剪切曲线,计算所得的力学参数可用来计算车辆沉陷量、土壤阻力,起到指导车辆通过的作用[3]。
美国陆军坦克自动车司令部二战后利用压板、爪盘模拟车辆和土壤仪器加载条件来测定土壤参数,此后国内外各研究机构设计完成了不同类型的贝氏仪。ALEXANDROU等[4-5]借助车载设备进行压板承压试验并研究下陷规律;BENOIT等[6]利用履带汽车和大型液压加载设备在实验室土槽进行压板试验; BOON等[7]利用车载设备借助PLC控制进行土壤贯入和剪切试验;2010年MASSAH等[8]设计推车式小型压板锥头液压贯入综合试验台;2011年APFELBECK等[9]借助多轴电动机对模拟月壤进行实验室压板沉陷爪盘剪切研究;2014年GRIFFITH等[10]借助电子万能试验机研究小径轮形压板与土壤相互作用规律。
庄继德科研团队[11-13]对塔克拉玛干沙漠砂土进行了一系列原位压板承压剪切试验;姚艳等[14]通过设计小面积压板在重塑土壤中的压板沉陷试验,研究室内重塑土壤承压下陷曲线拟合规律;蔡巍等[15]通过自行设计的便携式贝氏仪进行滩涂土壤承压剪切特性参数测量试验;柏建彩等[16]借助液压系统和配重进行农田原状土壤压实测试;邹猛等[17-18]采用改进的电子万能试验机对模拟月壤样品在小土槽中进行承压试验;徐国艳等[19]设计制作基于贝氏仪测试原理的土壤承压和剪切、圆锥贯入测试仪,仪器携带方便但只适用于松软土壤力学特性测试。
实际操作常以直径15 cm左右的压板匀速贯入土壤深度约10 cm,根据土体的不同,有时要求仪器施加的载荷达数吨,这对于加载装置要求较高。目前贝氏仪主要针对室内松软土壤设计,依靠砝码盘配重或者人体自重进行加载,量程较小,不足以指导野外路面车辆行驶。而室外贝氏仪必须依靠配重或者将仪器置于车体,依靠车体自重提供反作用力来提供加载力,较为复杂笨重,且无法用于实验室控制条件进行基础实验研究[3]。
圆锥指数仪源于美国工程兵水道试验站(WES)[3],相对于其他土壤力学特性测试工具,它的突出特点是简单高效,依靠人力或者电动机驱动,即可快速获取锥头贯入阻力曲线。目前广泛应用于农业领域,如记述反映作物生长的土壤特性,测定车辆对土壤压实的影响等。
地面力学涉及参数多,人们针对不同土壤特性研究发明了不同仪器进行测试[2],但一直以来较为缺乏可以同时测量软硬土体承压力、剪切力的综合仪器。
本文通过土壤承压、剪切相关理论,针对目前仪器系统测试过程分散的弊端,设计搭建地面力学参数综合测试系统(以下简称测试系统),并通过室内砂土试验进行验证。
1 土壤承压剪切相关理论
1.1 贝克承压下陷理论
土壤承压下陷模型如图1所示。
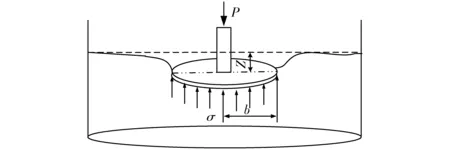
图1 土壤承压下陷示意图Fig.1 Sketch about pressure-sinkage of soil
BEKKER[3]建立了压板承压下陷关系
(1)
式中σ——平板接地比压,kPab——板宽(圆板的半径,矩形板的板宽),m
Z——下陷量,m
Kc——黏聚变形模量,kN/mn+1
Kφ——摩擦变形模量,kN/mn+2
n——土壤变形指数
1.2 爪盘剪切理论
土壤剪切强度为土壤产生的用以阻止剪切破坏的最大阻力,决定着车辆的牵引性能。被广泛应用的土壤塑性理论和摩尔- 库伦准则的剪切强度表达式为[3]
τmax=c+σntanφ
(2)
式中τmax——最大剪应力,Pac——内聚力,Paφ——内摩擦角,(°)σn——爪盘接地比压,Pa
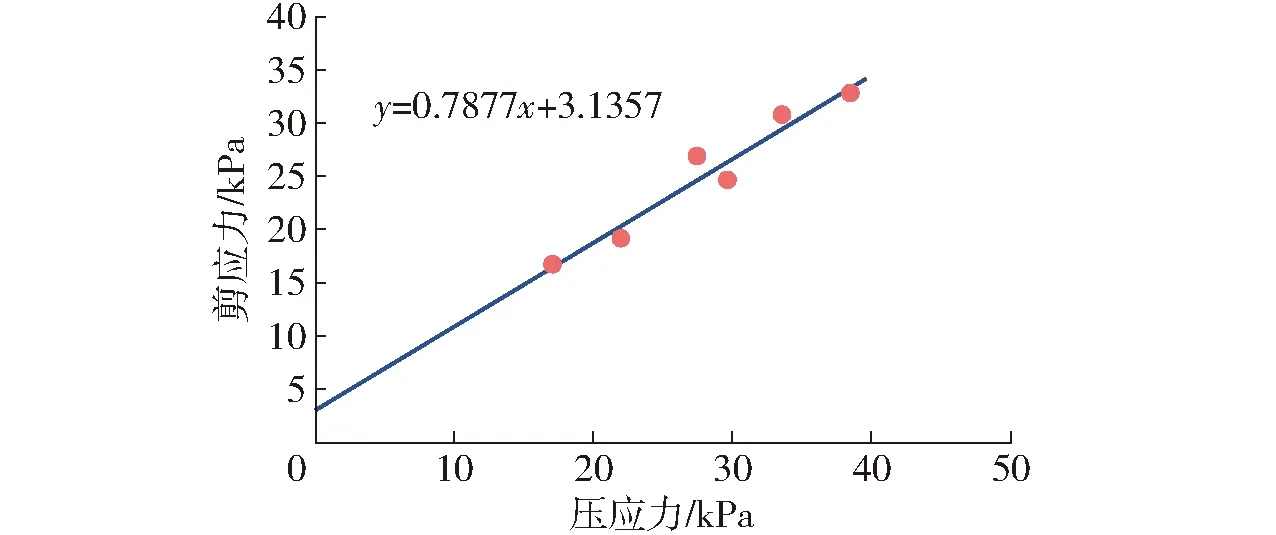
通过试验可绘制最大剪应力- 承压力曲线并拟合直线,根据斜率和截距可得内聚力c和内摩擦角φ,如图2b所示。剪应力- 扭转力公式为[3]
(3)
式中Tm——最大扭转力矩,N·mr——爪盘内径,mR——爪盘外径,m

图2 爪盘剪切示意图Fig.2 Sketches about theory of claw shearing
1.3 圆锥贯旋入理论
硬度测试是车辆地面力学测试的一个重要指标,地面力学中圆锥指数通过特定尺寸锥头的土壤贯入阻力用以描述土壤硬度,车辆下陷和滑转率与之关系密切。本实验台可起到研究锥头贯入机理的作用,同时测试所得指数值可用以预测越野车辆行驶通过性能和牵引性能。
2 设计要求和总体设计方案
测试系统总体设计要求:通过压板压入土槽后可以提供最大30 000 N的贯入压力,并不超过上下主梁的抗弯强度。传感器应便于进行整体更换,并保证扭转和承压两过程独立互不干涉,各传感器量程符合实际测试要求。这些要求的指标及具体实现参见关键部件设计。
测试系统机械结构如图3所示,采用丝杠SWL10T,减速比24∶1,丝杠升降长度500 mm。可以手动驱动,也可连接电动机驱动,将手轮或直流电动机的旋转运动转化为丝杠机的轴向直线运动,运动过程力矩小,运行效率高,同时过程控制简单高效。整体槽钢台架,丝杠直径58 mm。试验台上支架可以上下调节,进而协调由贯入部件更换引起的高度变化,下底盘留有贯入孔,室外原位试验时,撤去土槽,降低上支架至贯入组件接触土壤,在底盘两边配重即可实现野外加载试验。
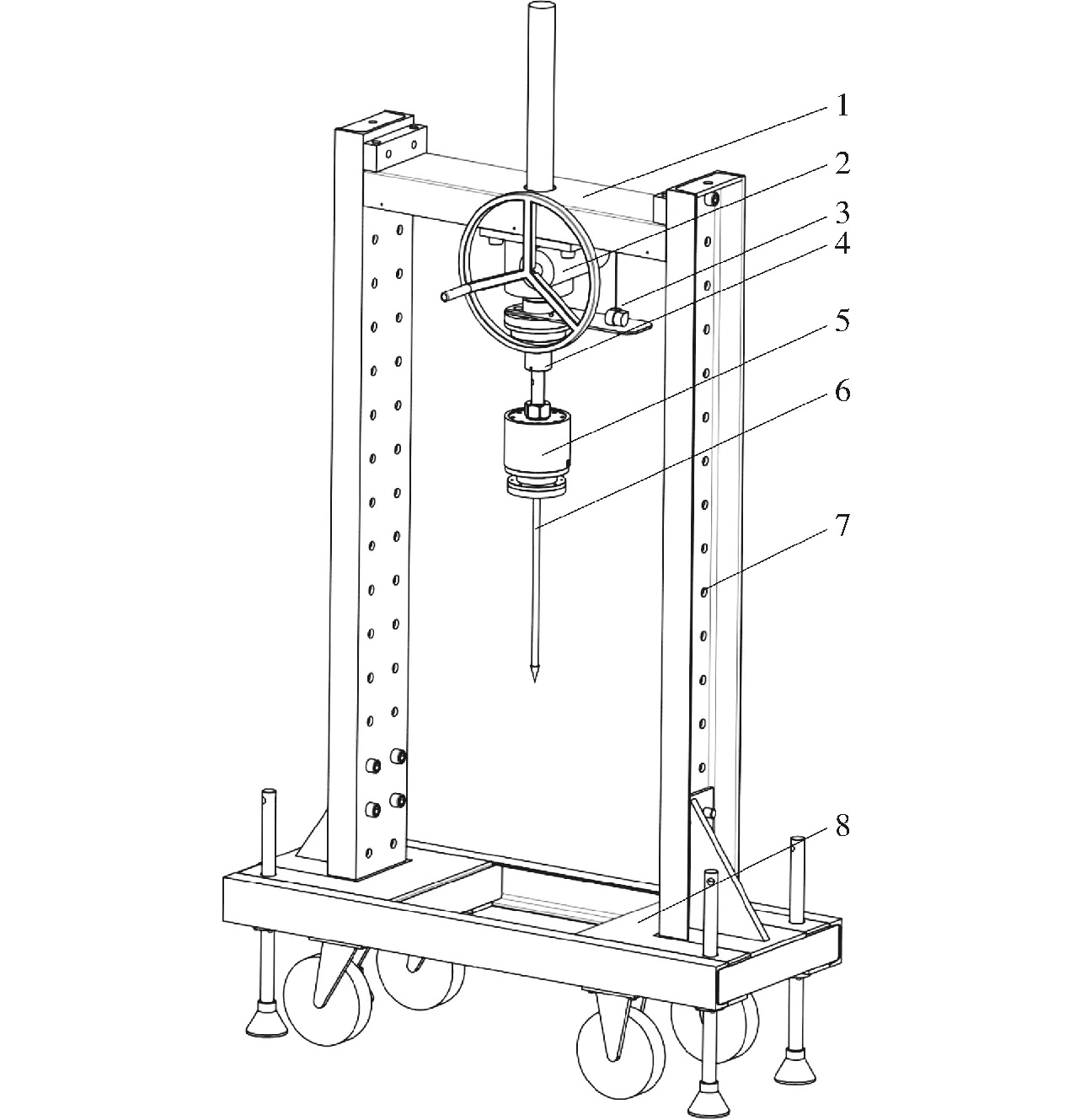
图3 地面力学参数综合测试系统结构简图Fig.3 Structure diagram of integrated test system for terramechanics parameters1.试验台上支架 2.丝杠升降机 3.拉线位移传感器 4.压力传感器组件 5.扭矩传感器组件 6.贯入部件 7.槽钢架 8.试验台下底盘(带轮和支盘)
3 关键部件设计
测试系统主要由加载机构和数据采集测试系统组成,设计的难点是实现土壤贯入旋转的独立操作、同步采集及量程变化。
3.1 加载及行走稳定机构
如图4所示,中间轴在自然状态下被防坠螺母卡住,与传感器顶头有约2 mm间隙,贯入体在贯入土壤过程中必然受到土壤阻力,当大于整个试验组件自重时,杆体顺着直线轴承上移抵住压力传感器,杆体以二力杆的形式将所受阻力传递到压力传感器。因此测试所得压力与试验组件自重之和即实际土壤反力。

图4 轴承标定、锥头、压板、爪盘试验组件示意图Fig.4 Sketch of test part assembly about bearing calibration, cone, plate and claw1.丝杠法兰 2.压力传感器 3.直线轴承 4.防坠螺母 5.中间轴 6.扭矩传感器 7.承压轴承 8.轴承座 9.爪盘 10.轴承标定座 11.压板 12.锥头
从便携性考虑,设计了行走轮。测试时可通过底盘4个定位盘将机构调平,保证测试过程的平稳。
3.2 支架及土槽设计
测试系统主体钢架核心选取槽钢,具体选型为上梁U-h80×b45,下底盘U-h120×b53,侧梁U-h160×b65,材料为S235。其中h为高度,b为宽度,具体可查阅机械设计手册[20]。
选取槽钢安全系数v=2(静动态之间),对于许用应力σallow=σlim/v=150 MPa,以上梁为例进行强度校核:
对于两端支撑,受集中载荷的梁:弯曲应力σb=Mb/W,W为轴向载荷模量,弯曲力矩Mb=Fl/4,对于槽钢U-h80×b45,W=26.5 cm3。
当F=30 000/2=15 000 N,l=0.8 m,此时
同理可验证下梁在轴向载荷作用下也低于许用应力,满足总体设计要求中的不超过上下主梁抗弯强度的强度设计要求。
土槽尺寸设计考虑围压对试验结果的影响,选取土槽尺寸长600 mm、宽600 mm、高500 mm,长、宽为最大压板直径150 mm的4倍,材料选取钢板包合角铁,避免出现高载荷土槽破裂。由压力传递规律
(4)
式中p0——地表所受压板压力,kPaσz——深度Z处传递应力,kPaZ——深度,m
可知在土槽深度0.5 m左右,正底部土壤的压力约为土壤表面压力的3%,进而可大大减少边缘效应。
3.3 贯旋同步设计及传感器量程选择
如图4所示,爪盘、轴承标定座、压板、锥头可配合主体结构(选择适合的传感器)实现不同的测试试验。
为解决压力传感器与扭矩传感器互相影响以及不同组件配套传感器的更换,设计中空式扭矩传感器外形,与轴承座、贯入体部件螺纹刚性连接。承压轴承受压时,与中间轴紧固的内环保持不动,轴承座带动外环随扭矩传感器转动,最终实现一体两动,扭转、贯入操作独立实现,互不干涉。承压轴承密封于腹腔体上,可起到防尘防土的作用,从而保证传动性能。因此需对承压轴承在不同压力下的摩擦力进行标定,测试所得扭矩与该压力下轴承摩擦力之差即为实际土壤反力。
传感器选型是较为关键的环节,由于测试系统涉及扭转、下压两种运动,并且圆锥、压板、爪盘3组试验决定各自独立的量程。因此,结合前人试验数据分析及本试验台架需要,压力传感器和扭矩传感器座进行统一封装,保证外形尺寸一致,便于更换。贯入组件采用高强度不锈钢,耐腐蚀且强度高。
3.3.1 锥头贯入部分组件
对于硬质地面,圆锥指数CI变化范围0~10 MPa[21],参考标准的大号WES圆锥,设计测试圆锥头底面直径d为22.27 mm,锥杆角度30°。为增加对比性及研究性,增加45°、60°、90°几种锥头类型。
F=πCI(d/2)2≤3 799 N,选择压力传感器量程4 000 N。
3.3.2 爪盘扭转试验部分组件
不同的土质,未经扰动的坚实土壤,如粉土、壤土、坚实的砂和松散的土壤,如干砂、饱和粘土,均决定爪盘的最小尺寸,大的爪盘可较明显改善由于土质不均和表面凹凸不平的影响,但由于仪器容许扭矩和压力、自身重力以及土槽尺寸限制,爪盘外直径尺寸R限制在100~200 mm为宜。决定爪盘剪切效果另一因素是外内径之比R/r,根据文献[3]对越野行驶、农业机械、实验室土壤力学测试等众多研究机构测头尺寸的汇总及总结,R/r介于1.1~2.0之间。综上,设计本爪盘尺寸为:爪盘1:内径r=80 mm,外径R=120 mm;爪盘2:内径r=130 mm,外径R=200 mm。考虑下压过程中内壁影响,爪盘带通气孔空腔。
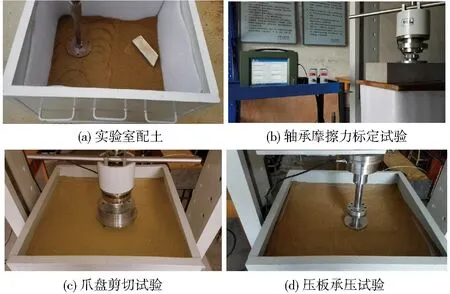
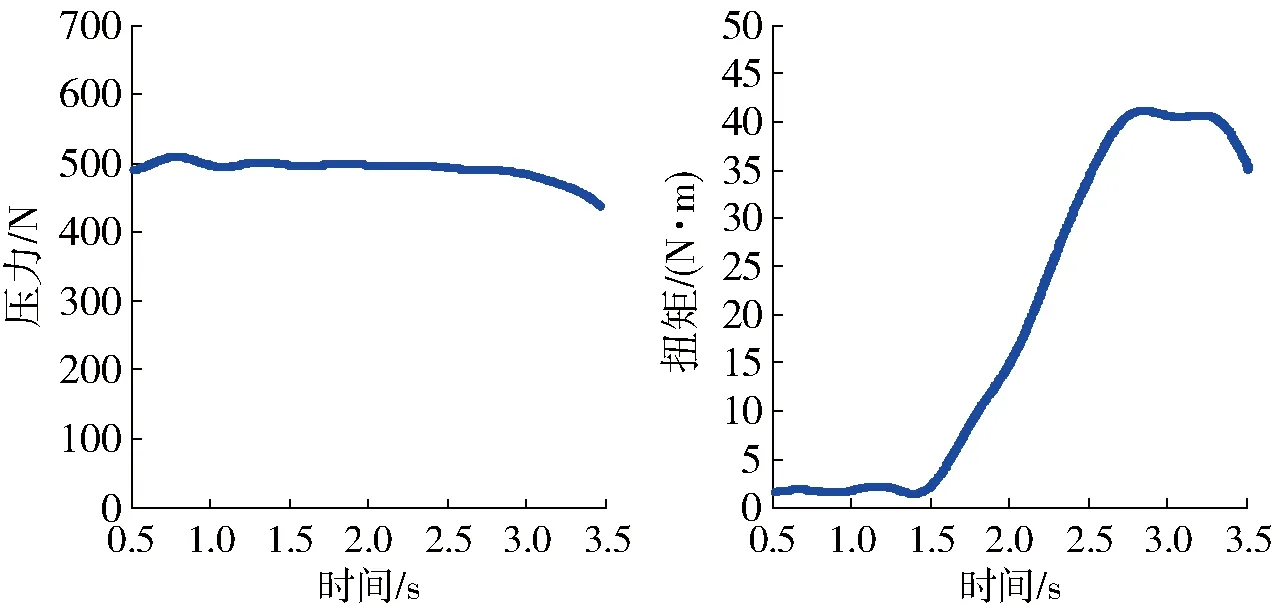
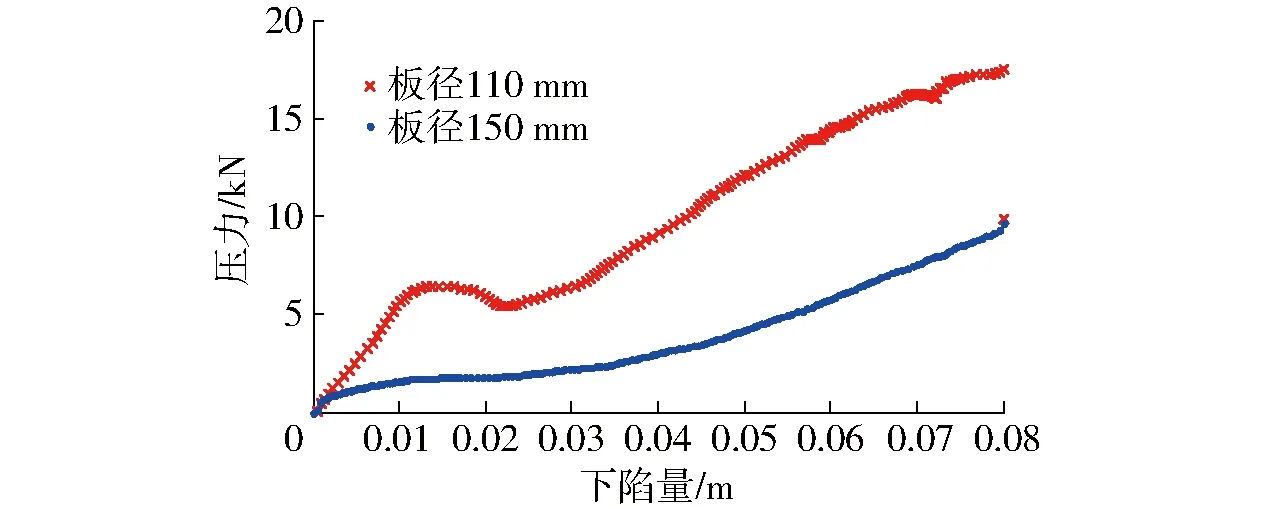
取内聚力0 选取扭矩传感器量程300 N·m,对应压力传感器量程4 000 N,这样可以与锥头共用同一压力传感器。 3.3.3 压板压入试验部分组件 与爪盘类似,土壤均匀程度影响压板最小尺寸,由式(1)知压板半径b影响后续承压力学参数求解,因此压板尺寸应有一定间隔,设计直径为110 mm、130 mm和150 mm 3种压板,与台架承载能力相对应,压力传感器量程选择30 000 N。 3.4 信号采集系统 信号采集系统主要由力传感器、拉线位移传感器、放大器、数据采集卡、计算机等组成,如图5所示。 图5 地面力学参数综合测试系统实物图Fig.5 Physical photo of integrated test system for terramechanics parameters1.采集仪 2.位移传感器 3.适配器(从左至右为位移传感器适配器、扭矩压力应变放大器) 4.压力传感器 5.扭传感器 6.贯入体(图示为爪盘) 试验需要测试位移、力、扭矩3个物理量,利用Delphi程序开发工具编制软件进行信号采集,图6为编制的采集界面,可设置采样频率、采集时间,统一采集时间。在软件参数录入界面输入应变放大器增益、灵敏度、传感器灵敏度、位移传感器电阻、初始位置,软件显示窗口可以显示力、扭矩、位移的自动计算结果。 图6 采集软件界面Fig.6 Acquisition software interfaces 4.1 压力传感器标定 由贝克理论可知,土壤承压下陷有类似于弹簧受压的规律,因此对于压力传感器的标定可借助承压仪进行动态模拟测量和力学性能标定,该力学标定系统由高强度压力弹簧、电子地磅等组成,压力弹簧下部以环形阵列的方式定位在套筒内,封装在柱形桶内。测量过程中,压力传感器输出电压信号,与数字电子秤显示数值进行动态比较处理,通过对0~30 000 N范围内压力传感器进行标定,直线拟合决定系数为0.998,表明输入-输出特性服从严格的线性关系。 4.2 位移传感器电阻标定 如图5所示,拉线位移传感器Celesco MT2A-30E-33-10K-C1为精准电阻输出,量程700 mm,工作电压5~30 V,借助自制的传感器标定距离线卡对位移传感器电阻进行标定,通过传感器在不同拉线量输出电压和电源输入电压的关系可求得传感器电阻ro=15.4 Ω。 4.3 承压轴承摩擦力标定 组装轴承摩擦力标定试验组件,试验过程设置采样频率200 Hz,采样时间10 s。 采集原始扭矩、电压信号,先对信号进行下采样(先滤波后减采样率),然后进行中值滤波。 采集多组不同压力下扭矩信号,做差消除零漂影响,同时取绝对值输出扭矩正值,得到对应压力F与扭矩T的散点图,按趋势进行线性拟合绘制单个轴承摩擦力曲线如图7所示。 图7 轴承摩擦力数值拟合结果Fig.7 Numerical fitting result of bearing friction 5.1 实验室配土及基本物理参数测试 图8所示为土槽砂土配制及各试验图片,首先利用孔宽0.35 mm×0.35 mm钢丝网筛选湿润细砂,然后分层配土镇压。试验前对不同深度配置的砂土利用不锈钢环刀进行多组取样,通过质量体积比取均值测定该砂土密度γ=1.86 g/cm3。将干燥铝盒置于150°内的干燥箱内约8 h,借助电子天平,通过干燥前后的质量差计算平均含水率约为9%。 图8 土壤参数测试试验照片Fig.8 Photos of soil parameter tests 5.2 爪盘剪切测试 如图8c所示,选取大号爪盘(内径130 mm,外径200 mm),组装爪盘贯入、扭转试验部件。爪盘开始贯入土体后,由于土壤反作用力,中间轴下部顶住承压轴承,上部顶住压力传感器触头,压力传感器感受采集力信号,贯入到一定深度后,维持深度不变,匀速扭转扭矩传感器,爪盘随着扭矩传感器转动,采集此时扭矩和力信号。扭转一圈后停止,增压下压,继续扭转采集;试验重复6~8次。压力随下陷量变化曲线如图9所示,可以看到随着剪切的进行,有较明显的驼峰,符合未经搅动的密实砂土特点。需注意剪切盘及扭转组件自身质量不可忽略(21 kg),已计算包含在压力中。另外压力传感器下置有高强度弹簧,避免剪切过程发生刚性泄力导致压力突变。 图9 爪盘剪切试验结果Fig.9 Test result of claw shearing of soil 采集6组不同压力作用下扭矩信号,做差消除零漂影响,同时取绝对值输出扭矩正值,计算得到对应剪应力与压应力散点图,按趋势进行线性拟合,结果如图10所示。 图10 剪压应力拟合曲线Fig.10 Fitting curve of shear stress and compressive stress 拟合剪应力- 压应力直线方程:截距b=3.135 7,斜率k=0.787 7,对比分析式(2)可得:实验室砂土内聚力c=b=3.14 kPa,内摩擦角φ=arctank=38.2°。 5.3 压板贯入测试 如图8d组装压板贯入试验部件,首先取110 mm压板开始贯入土体后,由于土壤反作用力,中间轴下部顶住承压轴承,上部顶住压力传感器触头,压力传感器感受采集力信号;压板匀速下压,采集贯入过程中压力传感器信号,压板贯入10 cm左右时,停止信号采集,平整重塑土壤,换取直径150 mm压板再次开始试验过程。砂土土壤承压沉陷试验最终所得曲线如图11所示。 曲线分析可知,150 mm压板在下陷初始有一个小陡峰,可能原因是110 mm压板下压之后对表层土体影响较大,后期缺乏有效平整恢复。但曲线整体走势接近线性,符合砂土的承压下陷曲线。 图11 压实砂土试验沉陷曲线Fig.11 Pressure-sinkage curves of compacted sand 为确定Bekker承压模型的3个待定参数,可采用加权最小二乘法进行承压特性参数的计算[18]。 (5) (6) (7) 式中pi——压力zi——沉陷量nav——2个压板得到的变形指数平均值 K根据b的不同有两个取值Kb1与Kb2,联立式(5)~(7)可得承压参数:Kc=178.73 kN/mn+1,Kφ=11 908.40 kN/mn+2,n=0.963。 (1)在贝氏仪基本原理的基础上,设计了地面力学参数综合测试系统,承压量程可达30 000 N,贯旋体可实现竖直和旋转两维度运动互相独立,从而实现锥头、爪盘、压板等地面力学测试部件的一体通用,配合相应信号采集系统,满足地面力学参数大量程、多维度、统一性的测试要求。 (2)在传感器及轴承摩擦力标定的基础上,利用土壤承压下陷测试系统对实验室砂性土壤进行承压力、剪切力试验,爪盘剪切试验求得砂土内聚力为3.14 kPa,内摩擦角为38.2°;压板试验求得砂土变形指数为0.963,粘聚变形模量为178.73 kN/mn+1,摩擦变形模量为11 908.40 kN/mn+2。结果表明,综合测试仪起到了较好的效果,可为研究载荷- 下陷曲线、剪切- 应力规律提供试验基础。 1 孙刚,高峰,李雯.地面力学及其在行星探测研究中的应用[J].力学进展,2007,37(3):453-464. SUN Gang, GAO Feng, LI Wen.Terramechanics and its application in planetary exploration[J].Advances in Mechanics,2007,37(3):453-464.(in Chinese) 2 李建桥,黄晗,王颖,等.松软地面机器系统研究进展[J/OL].农业机械学报,2015,46(5):306-319.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20150544&flag=1. DOI:10.6041/j.issn.1000-1298.2015.05.044. LI Jianqiao,HUANG Han,WANG Ying, et al. Development on research of soft-terrain machine systems[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2015,46(5):306-319. (in Chinese) 3 BEKKER M G.Introduction to terrain-vehicle systems [M].Ann Arbor, Michigan: The University of Michigan Press, 1969. 4 ALEXANDROU A, EARL R. In situ determination of the pre-compaction stress of a soil[J]. Journal of Agricultural Engineering Research, 1995, 61(1):67-72. 5 ALEXANDROU A, EARL R. Development of a technique for assessing the behaviour of soil under load [J]. Journal of Agricultural Engineering Research, 1997, 68(2):169-180. 6 BENOIT O, GOTTELAND P. Modelling of sinkage tests in tilled soils for mobility study [J].Soil & Tillage Research, 2005, 80(1-2):215-231. 7 BOON N E, YAHYA A, KHEIRALLA A F. A tractor-mounted, automated soil penetrometer-shearometer unit for mapping soil mechanical properties [J]. Biosystems Engineering, 2005, 90(4):381-396. 8 MASSAH J, NOOROLAHI S. Design, development and performance evaluation of a tractor-mounted bevameter[J]. Soil & Tillage Research, 2010, 110(1):162-166. 9 APFELBECK M, SEBASTIAN K, BERNHARD R. A systematic approach to reliably characterize soils based on bevameter testing[J]. Journal of Terramechanics, 2011,48(5): 360-371. 10 MEIRION-GRIFFITH G, NIE C, SPENKO M. Development and experimental validation of an improved pressure-sinkage model for small-wheeled vehicles on dilative, deformable terrain[J]. Journal of Terramechanics, 2014,51:19-29. 11 庄继德.汽车地面力学[M].北京:机械工业出版社,2002. 12 李杰,庄继德,季学武.车辆行驶的沙漠沙承压特性的研究[J].兵工学报,1999,20(1):62-64. LI Jie, ZHUANG Jide, JI Xuewu. Pressure-sinkage characteristics of desert sand under a moving vehicle[J].Acta Armamentarh,1999,20(1): 62-64. (in Chinese) 13 庄继德.计算汽车地面力学[M].北京:机械工业出版社,2001:18-27. 14 姚燕,丁启朔,周俊.重塑土壤承压模型的建立与试验[J].农业机械学报,2010,41(3):40-45. YAO Yan, DING Qishuo, ZHOU Jun.Pressure-sinkage characteristic model of remolded soil[J].Transactions of the Chinese Society for Agricultural Machinery, 2010,41(3): 40-45. (in Chinese) 15 蔡巍,王新明,孙家军. 江苏如东滩涂土壤承压剪切特性参数测量[J]. 制造业自动化,2012,34(5):133-135. 16 柏建彩,丁启朔,陈青春,等.农田原状土壤压实测试系统的设计及操作方法[J].江苏农业科学,2015,43(1):368-370. 17 邹猛,李建桥,何玲,等.不同粒径分布模拟月壤承压特性试验研究[J].航空学报,2012,33(12):2338-2346. ZOU Meng, LI Jianqiao, HE Ling, et al. Experimental study on the pressure-sinkage characteristic of the simulant lunar regolith with different partical size distributions[J]. Acta Aeronautica et Aeronautica Sinica, 2012, 33(12):2338-2346.(in Chinese) 18 邹猛,李建桥,刘国敏,等. 模拟月壤地面力学性质试验研究[J].岩土力学,2011, 32(4):1057-1058. ZOU Meng, LI Jianqiao, LIU Guomin, et al. Experimental study of terra-mechanics characters of simulant lunar soil[J]. Rock and Soil Mechanics, 2011, 32(4):1057-1058. (in Chinese) 19 徐国艳,高峰,唐晓峰,等.一种用于测量土壤承压和剪切特性的测量仪:中国,102109439B[P]. 2013-01-30. 20 闻邦椿. 机械设计手册[M].北京:机械工业出版社,2010. 21 孟繁佳,马道坤,孙宇瑞. 滚珠丝杠传动的土壤圆锥指数仪设计[J].农业机械学报,2009,40(5):52-55. MENG Fanjia, MA Daokun, SUN Yurui. Soil cone penetrometer with ball screw transmission[J]. Transactions of the Chinese Society for Agricultural Machinery, 2009,40(5):52-55.(in Chinese) Design and Experiment of Integrated Test System for Terramechanics Parameters WANG Wei ZHAO Jiafeng SHEN Chenhui ZHANG Xiaoliang Soil compressive strength and shear strength are important problems in the field of agricultural engineering, and vehicle subsidence depth and driving resistance are closely related with soil pressure and shear properties. In order to improve the testing range of bevameter independent of large equipment and solve the dispersion and diversity of test methods about terramechanics parameters, a comprehensive tester of soil pressure, shear and adhesion both indoor and outdoor was designed. Penetration test was independent of torsion process and did not impact relatively, realizing the testing and data processing independently. Choosing the drive motor or manually driven by screw lift transmission, the test instrument can obtain high range and accurate operating control. The system with cable displacement sensor and force torque sensor can take real-time dynamic travel information about soil sinkage depth, soil shear strength, and soil resistance of bearing pressure and other information, realizing the automation of computer remote control and data acquisition and processing. Shearing tests of wet compacted sand got results that soil cohesion was 3.14 kPa, internal friction angle was 38.2°; the plate loading test of wet compacted got results that the sand deformation index was 0.963, the cohesive deformation modulus was 178.73 kN/mn+1and friction deformation modulus was 11 908.40 kN/mn+2. The results showed that the comprehensive test instrument provided experimental basis and played a good effect on the research on load subsidence curve and shear stress distribution. Laboratory sand tests showed that the instrument had high reliability and practicability. The instrument met the requirements of test for a large range, multi dimension and unity of terramechanics parameters. terramechanics; soil parameters; test system; pressure properties; shear properties 2016-09-18 2016-10-13 国家自然科学基金项目(51575523)和军内科研项目 汪伟(1963—),男,教授,博士生导师,主要从事测试技术、故障诊断和信号处理等研究,E-mail: wangweiwill@126.com 10.6041/j.issn.1000-1298.2017.05.008 S152.9; S237 A 1000-1298(2017)05-0072-07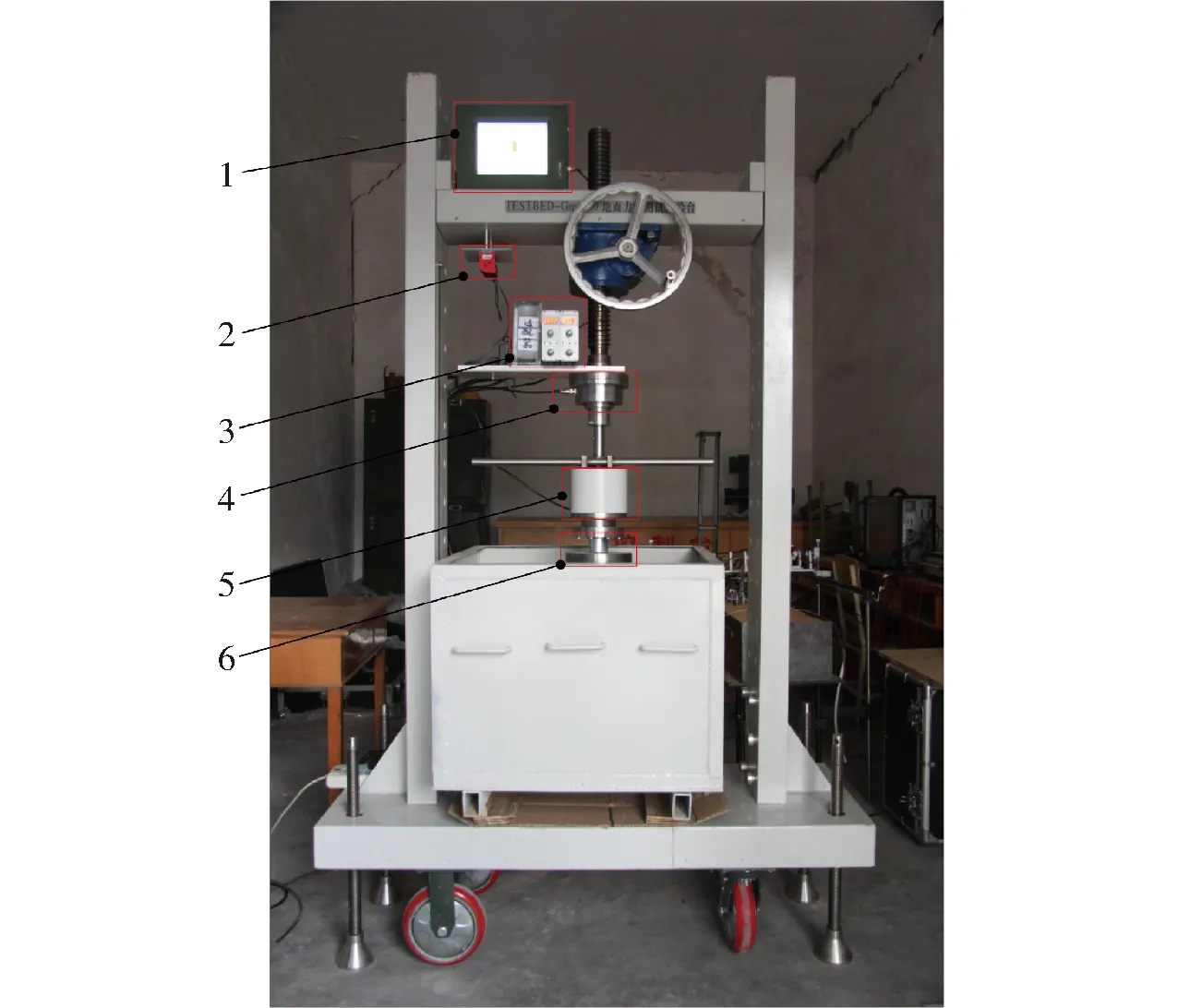

4 传感器动态标定

5 实验室砂土参数测试试验
6 结论
(DepartmentofArtilleryEngineering,OrdnanceEngineeringCollege,Shijiazhuang050003,China)
猜你喜欢
橡塑技术与装备(2022年12期)2022-12-12
快乐语文(2021年11期)2021-07-20
水力发电(2021年2期)2021-05-14
快乐语文(2020年36期)2021-01-14
快乐语文(2020年30期)2021-01-14
装备制造技术(2020年2期)2020-12-14
凿岩机械气动工具(2017年3期)2017-11-22
中学生天地(A版)(2016年5期)2016-05-14
中国机械工程(2015年13期)2015-12-16
科技视界(2014年11期)2014-06-28