基于CCD的透镜焦距测量实验系统的设计
2017-06-05 14:15:40郭振宇何鹏举王西玲徐荣青
计算机技术与发展 2017年5期
郭振宇,谢 娜,何鹏举,王西玲,谌 静,徐荣青
(南京邮电大学 电子科学与工程学院,江苏 南京 210003)
基于CCD的透镜焦距测量实验系统的设计
郭振宇,谢 娜,何鹏举,王西玲,谌 静,徐荣青
(南京邮电大学 电子科学与工程学院,江苏 南京 210003)
针对传统测量焦距读数所引起误差较大的问题,实验系统在传统放大率法测焦距的基础上用CCD代替人眼实现数字化测量,并用电控平移台控制步进精度,显著提高了其测量精度和自动化程度。图像清晰度评价是焦距测量的一个关键步骤,在对CCD工业相机获取的图片的清晰度评价中,提出了一种改进的灰度差分评价函数,提高了图片清晰度评价精度和速度,从而提高了系统的测量速度。实验进行了光学成像系统的搭建,以Matlab为开发平台进行软件开发,实验系统搭建方便,操作简单,测量精度和自动化程度高。实验结果表明,该系统能够对透镜焦距(以正透镜为例)进行准确测量,改进的清晰度评价函数聚焦速度比传统的清晰度评价函数快3倍,测量焦距重复精度高于1%。
CCD;清晰度评价;焦距;实验系统
0 引 言
机器视觉作为人工智能发展的一个分支,应用广泛,用机器代替人眼来做测量无疑是一项提高精度的好方法。机器视觉系统是通过图像摄取装置(CMOS和CCD)将被摄取目标转换成图像信号,传送给专用的图像处理系统以获得需要的结果。该技术扩大了光学测量的范围,提高了测量精度,大大增强了光学测量的手段。CCD(Charge Couple Devices)能够把光信号转换成电荷信号,经外部采样放大及模数转换电路转换成数字图像信号。其具有高解析度、低杂讯、动态范围广、良好的线性特性曲线、大面积感光、低影像失真等特点。
CCD作为一种提高精度的测量技术正被广泛地应用在光学测量中[1-6]。文献[1]中传统的测量透镜焦距的方法是用像屏获取图像,再对图像进行人工处理。这种做法不仅测量的精度不高,而且操作难度大。文献[7]中采用了VC++编写程序来完成对图像的处理,不仅开发效率低,而且还要求编程人员具有较高的代码水平。为了能获得较高精度的焦距测量值,采用CCD工业相机作为图像获取的工具;同时又为了能对图像进行高效处理,采用了Matlab进行图像的处理和分析,提高了开发效率。设计的光学系统具有搭建方便,结构简单,以及测量精度高等优点。
根据最常用的放大率测焦距法的原理设计了切实可行的光学系统。在算法设计中,针对传统的灰度差分算法聚焦精度低、运算速度慢的缺点,提出了一种改进的灰度差分算法,提高了聚焦速度,判别清晰度只需400 ms,比传统的清晰度判别方法快了3倍;在图像提取和测量中,采用Canny算法对图像进行边缘检测,对图像采集的多条光条相邻两条的间隔取平均求得相邻光条像素间隔,同时进行多次像素间隔测量,用多次测量的结果进行像素标定,再进行焦距测量,提高了透镜焦距的测量精度,测量重复精度高于1%。
1 光学系统的设计
1.1 实验系统原理
放大率法是测量焦距最基本和最常用的方式,图1为放大率法测焦距的原理图。

1.分划板;2.平行光管;3.待测透镜;4.测量系统CCD相机
平行光管物镜焦平面上的分划板经过待测透镜后成像在待测透镜的焦平面上,测量系统获取待测透镜焦平面的像进行处理。设平行光管的焦距为f,待测透镜的焦距为f',分划板一对刻线的原像为y,经过待测透镜后变成y',则待测透镜焦距与平行光管焦距以及刻线原像和经过透镜成像的关系如式(1):

(1)
当在测量系统前加一个放大K倍的镜头时,得到y''。则可以得到:
y''=Ky'
(2)
由式(1)、(2)可得:

(3)
1.2 实验系统搭建
文献[1]中采用像屏来获取图像,该方案是比较传统的实验系统,读数误差会较大。系统采用CCD,有效降低了读数误差。
系统的搭建方案如图2所示,主要由平行光管、固定装置(用来固定平行光管和透镜)、CCD工业相机和电控平移台组成。
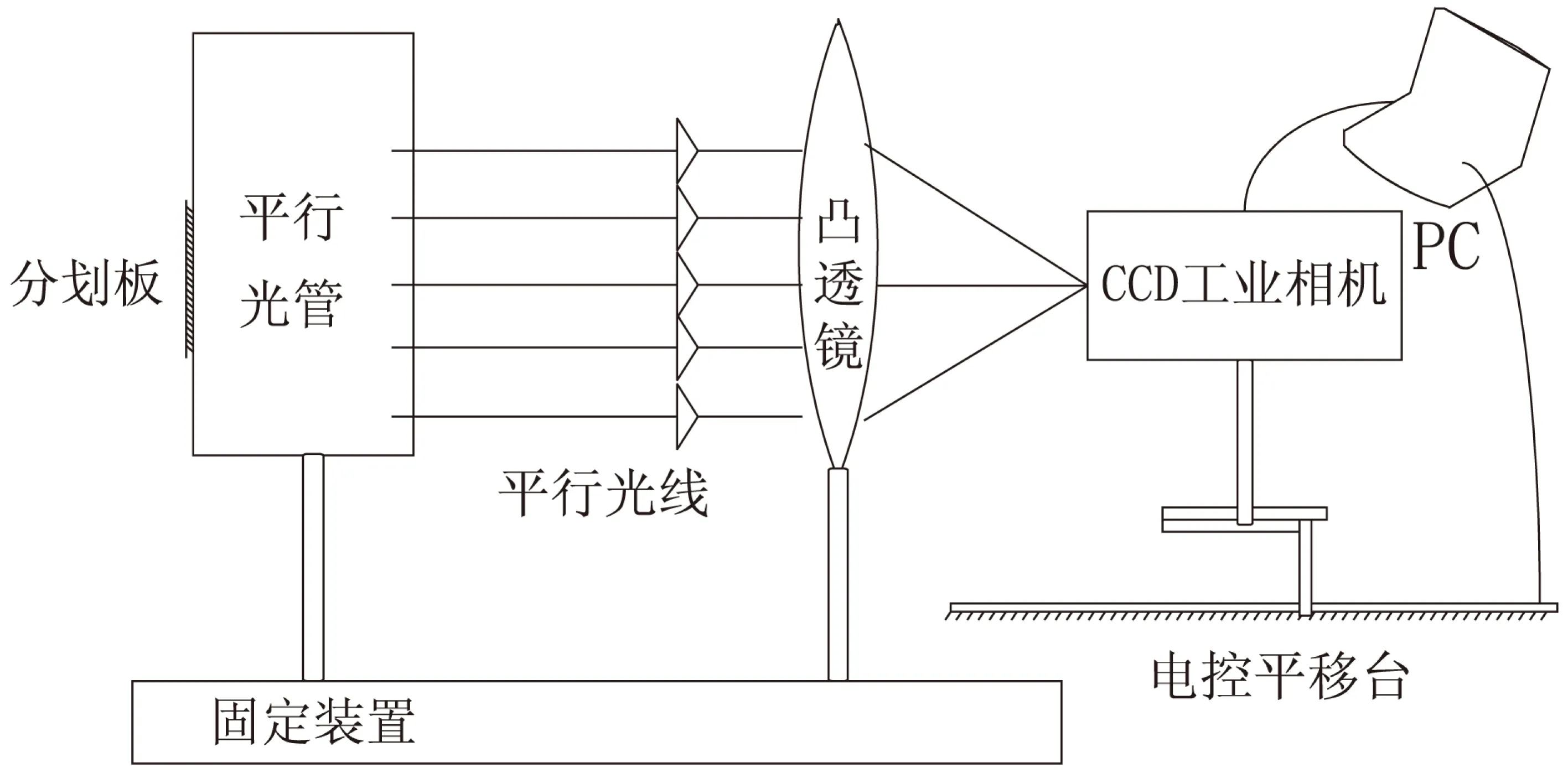
图2 光学系统搭建方案
平行光管型号采用F550,焦距550 mm,口径55 mm,相对孔径1∶10。电控平移台台面尺寸150×150,行程1 000 mm,单脉冲行程0.001 25,最大速度10 mm/s,步进电机1.8°。CCD工业相机采用2.0接口数字摄像机,1/3 Sony ICX445 CCD传感器芯片,体积为29 mm×29 mm×29 mm,单个像素尺寸为3.75 μm×3.75 μm,分辨率为1 292×964。
所有的器材按图2所示搭建,搭建完毕后要先进行平行光管的校调,采用自准直法[8]。平行光管校调完成后,再调节待测镜和CCD工业相机,最终让平行光管、待测透镜和CCD工业相机共轴。系统测量的正透镜焦距范围为30~225 mm,经过计算选用放大倍数为10倍的CCD工业相机镜头能符合测量范围要求。
2 算法设计
2.1 图像清晰度评价函数
图像清晰度评价函数对CCD自动调焦技术起着至关重要的作用。自动调焦是建立在搜索算法上的调焦方法,通过编程对不同对焦位置所获取的图像进行清晰度的判别。聚焦速度和聚焦精度是判断一个调焦方法好坏的重要标准。通过对传统灰度差分算法的改进,提出了一种聚焦精度较传统精度高的灰度差分算法。此外,将图像中心截取1/4面积进行清晰度判别,这样减少了图像运算的像素点个数,减少了算法的运行时间,提高了聚焦的速度。
理想的图像清晰度评价函数具有单峰性、无偏性等特点。常用的调焦评价函数[9-11]有灰度差分绝对值之和(SMD)、Vollath函数、梯度平方、TenenGrad函数、熵函数、Brenner函数等。假设图像f(x,y)中某点的灰度值为I(x,y)。
(1)Brenner函数。
(4)
(2)Tenengrad函数。
Fk=∑∑[S(x,y)]2
(5)
其中
(6)
且S(x,y)>T,T为阈值。
(3)梯度向量平方函数。
(7)
其中
G(x,y)=[I(x+1,y)-I(x,y)]2
H(x,y)=[I(x,y+1)-I(x,y)]2
(8)
(4)Vollath函数。

(9)
(5)熵函数。
F=-∑pilogpi
(10)
其中,pi=Ni/N,N为图像总的像素元素,pi为灰度值i出现的概率。当F值最大的时候图像最清晰。
(6)灰度差分函数(SMD)。
(11)
其中
(12)
式(12)是传统的灰度差分评价函数,只对灰度值水平和垂直方向做差。改进的灰度差分函数对像素I(x,y)的八邻域做差值,八邻域的位置如式(13)所示。

(13)
灰度差分绝对值只涉及加减法,便于实现,但是抗干扰能力不足,精准度不高。考虑到CCD对亮度信号的敏感性,以及选择亮线黑底分划板的情况,当图像比较清晰时,图片中亮度分量值较大;当图像模糊时,图片中的亮度分量值较小。所以,选择八邻域的灰度差分算法,增加了对周围点的判断,提高了聚焦精度。此外,为了提高清晰度判别速度,从图片中心截取100×100像素矩阵做差分,减少了运算的点数。所以改进的函数如下所示。
(14)
其中


(15)


由图3可以看出,ImproveSMD比SMD有着更好的聚焦精度,对图像清晰度的评价更有优势。此外,ImproveSMD虽然和Vollath函数具有相近的聚焦精度,但是改进的SMD的聚焦速度要好于Vollath函数。在选取100张图片进行测试时,改进的SMD只要400 ms就能出结果,而Vollath要1.24 s才能出结果。所以综合考虑聚焦精度和聚焦速度,选取改进的SMD作为实验系统的图像清晰度评价函数。
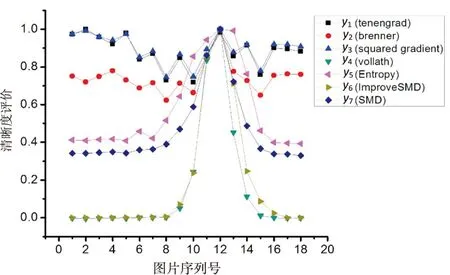
图3 多种函数清晰度评价曲线图
2.2 图像特征的提取和测量
图4是文中对图像进行提取和测量的处理步骤。
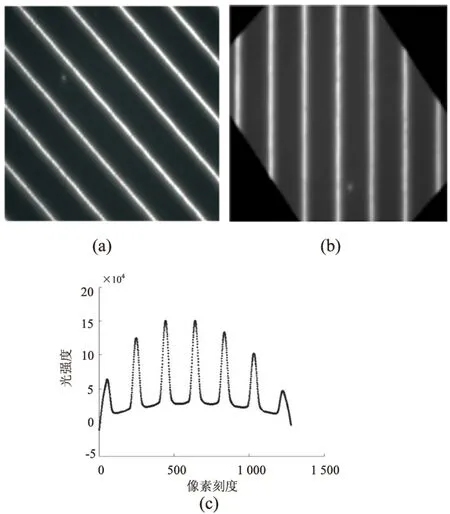
图4 图像处理过程
在采集的多张图像中用改进的清晰度评价函数找出一张最清晰的图片,如图4(a)所示。由于系统采集到的图片相对理想,所以利用简单的非线性滤波器中值滤波完成去噪。然后进行图像校正,步骤为:
(1)采用Canny算子进行边缘检测[12-13],该方法使用两个阈值检测强的和弱的边缘,如果它们被连接到边缘,那么输出只包含弱边缘。由于系统中成像清晰度较理想,边缘轮廓简单,所以采用Canny算子进行边缘检测。经过系统多次验证,Canny算子能精确提取边缘,效果能达到实验系统要求。
(2)边缘检测后,需要进行直线的提取,把图像边缘的直线找出来。
(3)根据直线方程求出直线斜率,并计算出直线与垂直线间的夹角即为倾斜角,再根据这个夹角对图像进行旋转校正。校正后的图像如图4(b)所示。
考虑到分划板做的比较精密,分划板的刻线误差很小,可以认为每条亮线的中心线就是灰度值最大的。对校正后的灰度图像进行各列求和,这样灰度图像的行就是像素刻度值,列就是各列像素灰度值的累和。如图4(c)所示,七个极值点对应着七条中心线的灰度和,横轴表示像素刻度。相邻极值点对应的横轴坐标两两相减再求和,最后对多个间隔求平均,就可以计算出相邻刻度线的间隔,然后根据式(3)就可以计算出透镜焦距。多条线取平均值是一种减小误差的好方法,对于提高系统的精度很有帮助。
2.3 像素标定
实验系统中,图像处理以像素为单位。所以,需要对像素进行标定,这样才能求出测量焦距和像素之间的标定系数。
由式(3)可以得出,焦距与像素D之间满足线性关系:f=AD+b。其中b为系统误差。为了消除系统误差,采用80mm和200mm的标准透镜来确定A和b的值。
以焦距f1=80mm和f2=200mm在图像最清晰处的每两条刻线的像素间隔进行10次测量,对测得的结果求平均值,得出80mm的像素平均值D1=77.711 4,200mm的像素平均值D2=198.433 3。由f=AD+b可得:

b=f1-AD1
(16)
测试过程中多次测量像素间隔取平均值是为了减少误差。计算出A=0.994 0 (mm/pix),b=2.754 9。
3 软件设计
该实验系统是用Matlab软件开发的,系统主要由电控平移台控制模块、图像采集和存储模块、图像处理模块和测量模块组成。
软件流程图如图5所示。

图5 软件系统流程图
首先对CCD工业相机和电控平移台进行初始化,然后开始测试。一开始电控平移台从初始位置大步长朝远离平行光管方向步进,用改进SMD计算最清晰像的位置;然后反方向步进回到最清晰位置前一个位置;再沿远离平行光管方向进行小步进扫描,并用改进的SMD找出最清晰的像,提取图像。图像提取之后,经过图像模块的滤波、边缘提取和图像校正之后,通过测量直接算出焦距。
系统将CCD工业相机和电控平移台通过USB接口连接笔记本,通过Matlab软件控制电控平移台的步进速度和精度,同时控制CCD拍照的张数,这就大大提高了自动化程度,并能快速测得焦距。
4 实验结果
系统硬件和软件设计完成后,开始进行实际测量。选取了透镜焦距标准值为30mm,80mm,200mm和225mm进行测量,每组测4次。测量结果如表1所示。
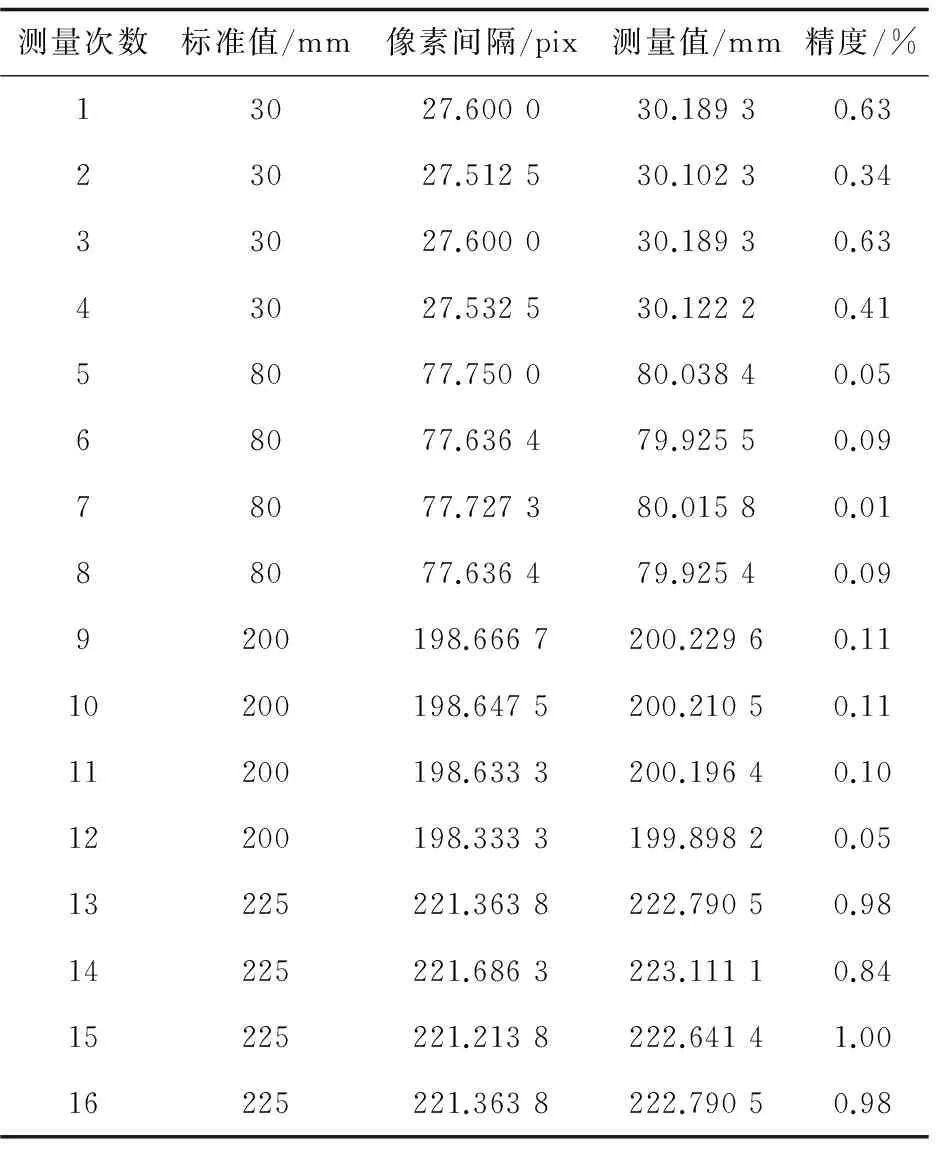
表1 测量结果
从表中可以看出,在经过像素标定后,系统在测量范围为30~225mm间的相对误差低于1%,表上只列出了4组测量结果。实际上,随着测量次数不断增加,在对每个透镜经过20次测量后取平均值,得出了重复精度30mm在0.46%,80mm在0.05%,200mm在0.10%,225mm在0.92%。结果表明,系统利用较简单的硬件搭建再配合软件的处理,实现了符合实验要求的对透镜焦距较高精度的测量和低难度的操作,为后续焦距测量研究奠定了基础。
5 结束语
为提高系统运行速度和焦距的测量精度,设计了用于实验研究的基于CCD的透镜焦距测量系统。该系统设计合理,搭建方便,测量速度快,测量精度高。系统加入了软件控制,提高了自动化水平,方便操作。测量结果表明,实验系统在范围为30~225mm的透镜焦距的测量中相对误差控制在0.01%~1%,重复精度高于1%,聚焦速度是400ms,相较于传统的聚焦算法快了3倍。
虽然实验系统能实现较高精度的焦距测量,但是仍有两个问题:一是在图像采集过程中,容易受外界光照的影响,这就需要在后续硬件结构上进行改进,可以给硬件系统加工一个避光罩子,以保证系统图像采集可以在一个稳定的环境中进行;二是相应的图像测量算法还需进一步研究,以尽可能地降低像素误差,提高测量精度。在后续软硬件进一步改进之后,相对焦距误差预计能达到0.10%。
[1] 饶世贤,刘仁明.一种简单测量凸透镜焦距的方法[J].大众科技,2011(1):24-25.
[2] 尹 真,谢良星,黄明亮,等.用CCD测量凸透镜焦距实验的研究[J].宜春学院学报,2008,30(4):39-40.
[3] 王建伟,安志勇,段 杰,等.基于CCD的光学系统焦距自动测量技术[J].红外与激光工程,2006,35(S):255-260.
[4] 林盛鑫,赵晓芳,杨 雷,等.基于红外CCD的掺钆液体闪烁体液位测量方法[J].半导体光电,2016,37(2):294-297.
[5] 王凤娇,景文博,刘 学,等.一种基于图像的光学系统测角精度检测方法[J].长春理工大学学报:自然科学版,2016,39(1):71-76.
[6] 袁 婷,张 峰,陶小平,等.基于相位测量偏折术的反射镜三维面形测量[J].光学学报,2016(2):101-107.
[7] 毕美华,刘文文.基于VC++6.0的IEEE1394CCD应用程序开发[J].现代显示,2009(3):38-42.
[8] 吴小平,周起勃.大口径长焦距平行光管系统及其装校[J].光学仪器,1993,15(5):26-28.
[9]JiangXueping,ChengQian,XuZheng,etal.Quantitativemeasurementofacousticpressureinthefocalzoneofacousticlens-linefocusingusingtheSchlierenmethod[J].AppliedOptics,2016,55(10):2478-2483.
[10]BenoitA,CalletPL,CampisiP,etal.Qualityassessmentofstereoscopicimages[J].EURASIPJournalonImageandVideoProcessing,2009(1):1-13.
[11] 尤玉虎,刘 通,刘佳文.基于图像处理的自动对焦技术综述[J].激光与红外,2013,43(2):132-136.
[12]MiaoC,ChaiZH,SunXL,etal.Retinalvesselcenterlinetrackingusingbilateralfilterandcannyedgedetector[J].InformationRecordingMaterials,2010,11(4):26-30.
[13]AkinlarC,ChomeE.CannySR:usingsmartroutingofedgedrawingtoconvertCannybinaryedgemapstoedgesegments[C]//Internationalsymposiumoninnovationsinintelligentsystemsandapplications.[s.l.]:IEEE,2015:1-6.
Design of Experiment System for Focal Length Measurement ofLens Based on CCD
GUO Zhen-yu,XIE Na,HE Peng-ju,WANG Xi-ling,CHEN Jing,XU Rong-qing
(College of Electronic Science and Engineering,Nanjing University of Posts and Telecommunications,Nanjing 210003,China)
The CCD-based experiment system is based on the traditional magnification method to measure the focal length and it uses CCD instead of the human eyes to achieve digital measurement.Meanwhile,the motor control console is used for stepper precision which significantly improves the accuracy and automation.The key to focal length measuring system is whether it can meet the real-time and focus accuracy in image clarity evaluation function.An improved definition evaluation algorithm called improved gray-difference evaluation has been proposed to improve the speed and accuracy of evaluation algorithm.And the quality of system has also been improved.Optical imaging system has been built in experiment and Matlab is used as a software development platform.It is convenient to set up the experiment system with high degree of automation and easy operation.Experimental results show that the system is accurate to measure the focal length of positive lens and the requirements of experiments have been met which the focus time of improved evaluation function is 3 times faster than traditional definition evaluation and that repeatability of measurement accuracy is better than 1%.
CCD;definition evaluation;focal length;experiment system
2016-05-25
2016-08-31 网络出版时间:2017-03-13
国家自然科学基金资助项目(11304159);教育部博士点基金项目(20133223120006)
郭振宇(1991-),男,硕士研究生,研究方向为数字图像处理和光通信技术;谢 娜,讲师,研究方向为光信息处理;徐荣青,教授,通讯作者,研究方向为光传感技术、光通信技术和光信息处理。
http://kns.cnki.net/kcms/detail/61.1450.TP.20170313.1545.020.html
TN06
A
1673-629X(2017)05-0174-05
10.3969/j.issn.1673-629X.2017.05.036
猜你喜欢
中学生数理化·八年级物理人教版(2023年11期)2023-12-26 07:50:00
中学生数理化·八年级物理人教版(2022年11期)2022-02-14 06:37:46
中学生数理化·八年级物理人教版(2022年11期)2022-02-14 06:37:16
中学生数理化·八年级物理人教版(2021年11期)2021-12-06 06:44:38
摄影与摄像(2021年12期)2021-10-01 14:23:33
艺术品鉴(2021年21期)2021-08-15 05:54:58
家庭影院技术(2020年11期)2020-12-28 01:22:30
锦绣·上旬刊(2020年3期)2020-06-08 09:43:52
物理实验(2015年9期)2015-02-28 17:36:45
声学技术(2014年2期)2014-06-21 06:59:08