
基于“二乘二取二”的船闸液位检测系统
2017-06-05 08:51:46陆乙君金浪滨汪保福丁扬威
浙江水利科技 2017年3期
陆乙君,王 俊,金浪滨,汪保福,丁扬威
( 1.杭州定川信息技术有限公司,浙江 杭州 310020;2.苍南县桥墩水库管理处,温州 苍南 325806)
基于“二乘二取二”的船闸液位检测系统
陆乙君1,王 俊2,金浪滨1,汪保福1,丁扬威1
( 1.杭州定川信息技术有限公司,浙江 杭州 310020;2.苍南县桥墩水库管理处,温州 苍南 325806)
针对船闸控制系统中液位误差大,给闸、阀门门体和启闭设备带来了潜在的破坏因素,设计了1套基于“二乘二取二”的船闸液位检测系统。系统将输出的液位信号通过“二乘二取二”结构的激光测距仪液位检测装置及算法处理,显著提高了液位检测的精度和可靠性。
船闸;“二乘二取二”;激光测距仪
1 问题的提出
内河水运的关键设施是船闸。船闸是向两端有闸门控制的闸室注/泄水、升/降闸室的水位,使船舶能克服航道中水位落差的厢行建筑物,而这一功能的实现是通过船闸闸门、阀门的启闭控制闸室内的水位涨落完成的。这种水位的落差本身因为水流的巨大冲击力给闸、阀门门体和启闭设备带来了潜在的破坏因素。为了避免这种因素造成的破坏,在船闸控制过程中,准确判断闸室内外水位的变化是非常必要的。
而目前,船闸控制系统中大量使用基于压力机理的水位计,其所代表的传统水位计在船闸运行中的表现差強人意[1],易损坏、不易维护、精确性低、可靠性低等缺点的存在,大大降低了船闸运行的可靠性。究其源由有2点:首先,船闸通过注/泄水进行闸室水位的升/降,闸室两侧的水位呈典型的动态水位特征,故水位计输出的液位数据、以及液位数据派生出的液位差数据的精度欠佳;其次,船闸的注/泄水夹杂泥沙、泥沙在闸室淤积产生淤泥,另一方面河床航道中亦存在动态变化的淤泥层,淤泥使压力式水位计的液位数据以及派生的液位差数据偏离真值。闸室的定时清淤不仅费时耗力,而且降低了船闸的通过能力。因此,亟待探寻既能排除淤泥影响、又能精准检测动态水位的液位检测方法。本文采用激光测距仪检测液位,淤泥对液位数据的负面影响将不复存在,有助于提升液位和液位差的检测精度;激光反射板所处的测井中安装消波网,消波网减小注/泄水时闸室动态水位的变化幅度,进一步提升液位的检测精度。借鉴轨道交通的“二乘二取二”安全计算机技术检测液位,提高液位检测的精度和可靠性,为不断发展中的更高层次的运行管理需求提供技术保障。
2 系统结构设计
2.1 系统结构
针对船闸控制系统中液位误差大,给闸、阀门门体和启闭设备带来了潜在的破坏因素,及船闸亟待挖掘的通行潜能,设计了基于“二乘二取二”[2]的船闸液位检测系统和方法。
基于“二乘二取二”的船闸液位检测系统其特征在于系统由船闸上游液位检测装置(100)、船闸上闸首(1)、船闸上闸首开度仪(3)、船闸上闸首注水泵(5)、船闸闸室液位检测装置(200)、船闸下闸首泄水泵(6)、船闸下闸首开度仪(4)、船闸下闸首(2)、船闸下游液位检测装置(300),下位机中央控制器PLC(7)、船闸闸首启闭机控制柜(8)、上位机监控PC(9)组成(见图1)。
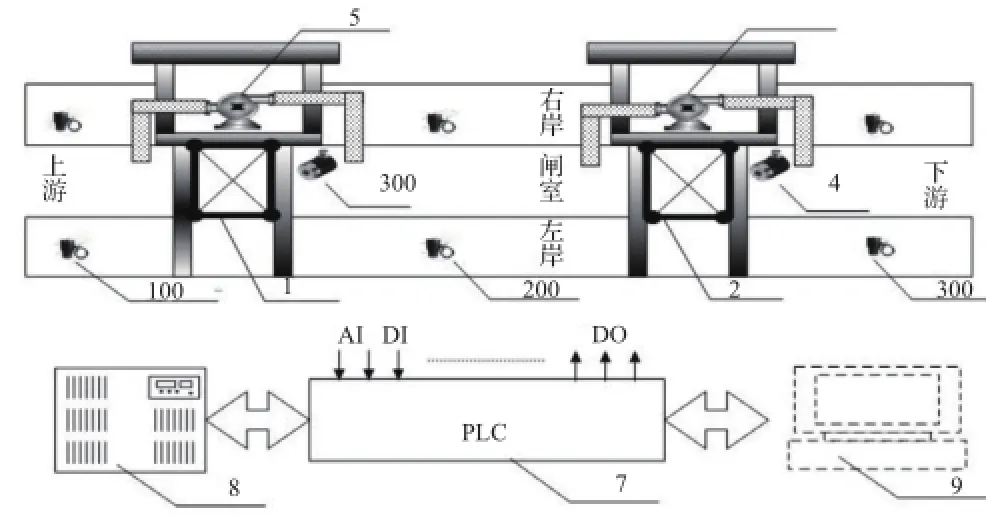
图1 基于“二乘二取二”的船闸液位检测系统结构图
2.2 “二乘二取二”安全计算机技术
“二乘二取二”系统结构见图2[3],联锁运算层有4个处理器单位,2个为一个系,分为A、B系,各系为“二取二”结构,双系互为热备双硬件冗余工作,系中每一单系均包括双套采样机实时校核工作。“二取二”即为在1套系统上集成2个处理器单位,严格同步,实时比较,只有2个单元运行时间一致,才对外输出或传输运算结果。任何单系检出故障均可立即倒向备系工作。而2套系统之间可以采取双系热备或二重比较。
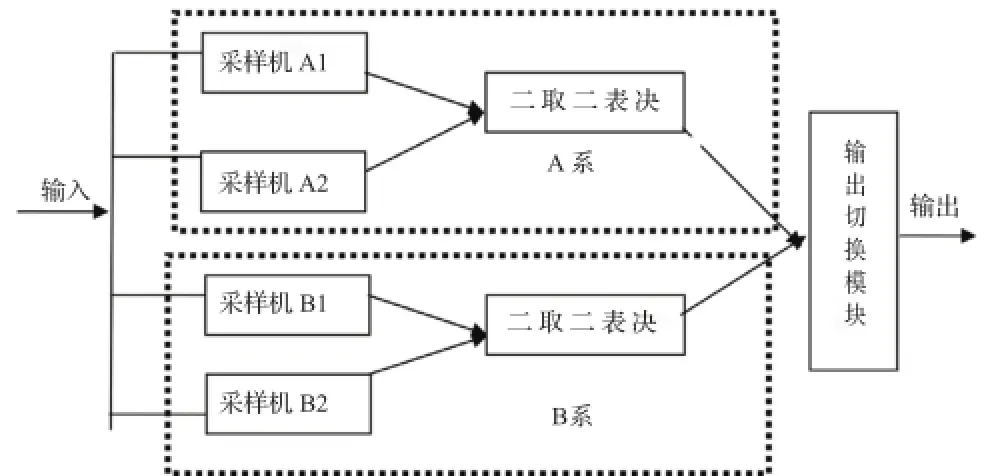
图2 “二乘二取二”系统结构图
“二乘二取二”系统是热备系统,无论当前是否为主系,4台主机都要一直工作。正常工作情况下,4台主机均要接收数据,并时刻检测接收数据的通信端口是否正常工作。一旦检测到通信端口工作异常,无论主系还是备系都要及时报告故障情况。每次主机接收到数据时,都必须对所有接收到数据进行二取二表决,当表决一致时,才将数据输出。当表决不一致时,直接报告主备切换器并视情况进行切换。
“二乘二取二”冗余系统的工作状态主要介绍系统当前的故障情况、主备情况和输出情况(见表1)。
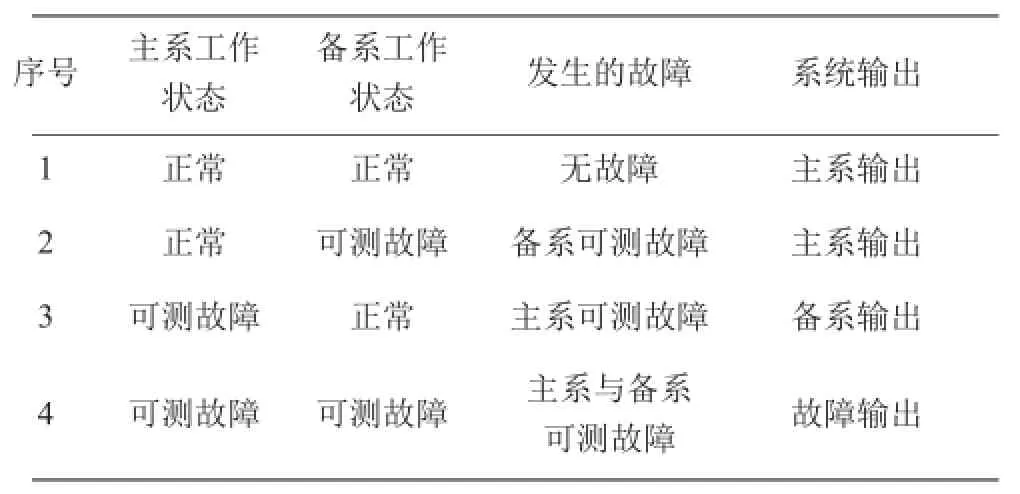
表1 “二乘二取二”主备系统状态表
“二乘二取二”结构构成的系统是互为校核与互为备用的组合。“二乘二取二”安全计算机技术做到了保证每个单位都有自检测能力;每系平等关系且没有主次之分;系统定期检测。
当前的计算机联锁系统主要采用双机热备系统,这种系统在长期应用和发展中已经暴露出软、硬件设计上的缺欠。随着提速、客运专线、大型客运站、重点车站、重载路线的建设和改造,他们对计算机联锁系统的可靠性、安全性提出了更高的要求,以适应铁路跨越式发展形式的需要[6]。世界上许多国家的实际证明,具有“二乘二取二”冗余结构的计算机联锁系统具有极高的可靠性和安全性。
3 “二乘二取二”液位检测系统
系统选用激光测距仪,将输出的液位信号采用“二乘二取二”结构的激光测距仪液位检测装置[4]及算法处理,提高液位检测的精度和可靠性。
船闸上游液位检测装置(100)、船闸闸室液位检测装置(200)和船闸下游液位检测装置(300)分别位于船闸上游、闸室和下游的左右两岸,水位计在船闸厢行建筑物中的分布见图3。上位机监控PC(9)与下位机中央控制器PLC(7)相连,船闸上游液位检测装置、船闸闸室液位检测装置和船闸下游液位检测装置的液位信号输入至下位机中央控制器PLC;液位检测装置均按“二乘二取二”的结构设计,下位机中央控制器PLC采用“二乘二取二”算法处理液位检测装置输入的液位模拟信号。
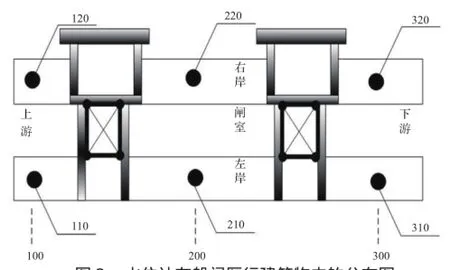
图3 水位计在船闸厢行建筑物中的分布图
船闸上游液位检测装置包括船闸上游左岸液位检测装置(110)和船闸上游右岸液位检测装置(120),左/右两岸的液位检测装置相同,船闸上游左岸液位检测装置位于船闸上游的左岸,船闸上游右岸液位检测装置位于船闸上游的右岸;船闸闸室液位检测装置和船闸下游液位检测装置与船闸上游液位检测装置类同。
船闸上游左岸液位检测装置由船闸上游左岸测井(111)、船闸上游左岸消波网(112)、船闸上游左岸激光反射板(113)、船闸上游左岸第1激光测距仪(114)和船闸上游左岸第2激光测距仪(115)组成[5],“二乘二取二”水位计液位检测的结构见图4。船闸上游左岸第1激光测距仪和船闸上游左岸第2激光测距仪安装于船闸上游左岸测井顶部,船闸上游左岸消波网安装于船闸上游左岸测井下端,船闸上游左岸激光反射板悬浮与船闸上游左岸测井水面,并与船闸上游左岸第1激光测距仪、船闸上游左岸第2激光测距仪配套;船闸上游液位检测装置配置4台激光测距仪、左/右岸液位检测装置各配2台,通过RS485与下位机中央控制器PLC的485口相连;4台激光测距仪构成经典的、“二乘二取二”液位检测架构,液位信号则采用“二乘二取二”的算法处理;在基于“二乘二取二”的船闸液位检测系统中,共计配备6座测井,12台激光测距仪。
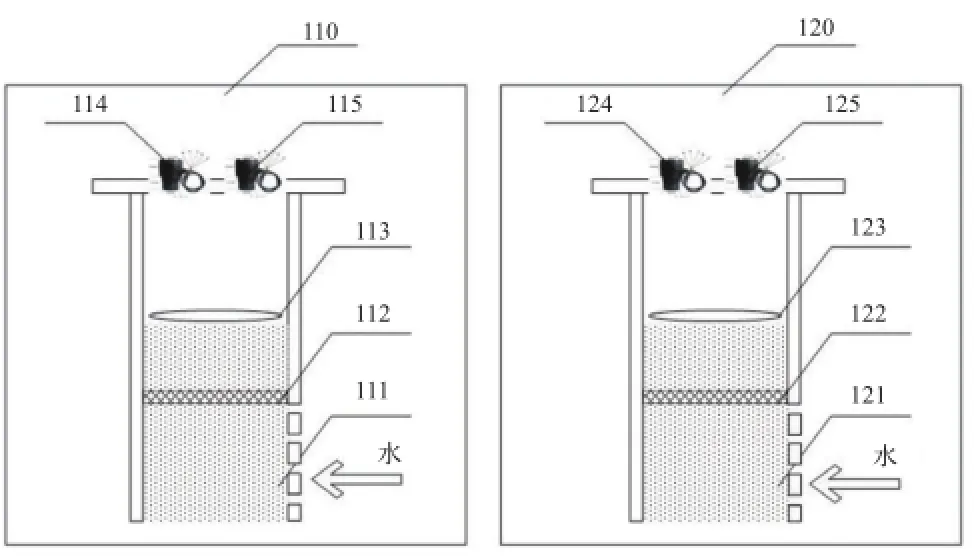
图4 “二乘二取二”水位计液位检测的结构图
3.2 “二乘二取二“液位检测算法
变量check 100 = 110或120、check 200 = 210或220、check 300 = 310或320分别表征船闸上游左/右岸液位检测装置、船闸闸室左/右岸液位检测装置、船闸下游左/右岸液位检测装置处于检测/备用或备用/检测状态。
船闸上游液位检测装置“二乘二取二”水位计液位检测的流程见图5,具体操作如下:

ESP:同一水位井液位差标准值
(1)检测状态的激光测距仪采样

船闸上游左岸第1激光测距仪和船闸上游左岸第2激光测距仪分别采样4次液位、通过RS485上传至下位机中央控制器PLC

船闸上游右岸第1激光测距仪和船闸上游右岸第2激光测距仪分别采样4次液位、通过RS485上传至下位机中央控制器PLC
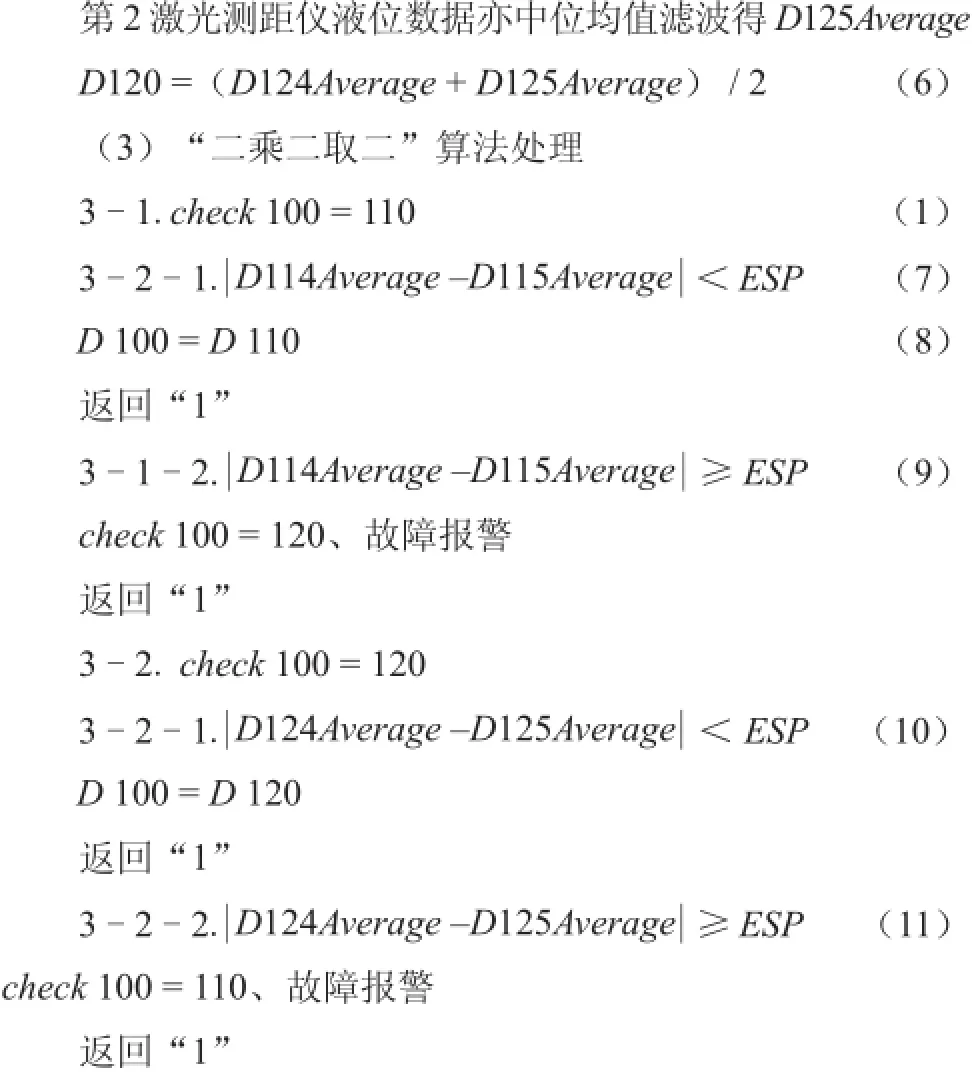
(2)激光测距仪液位数据的中位均值滤波

船闸上游左岸第1激光测距仪液位数据的中位均值滤波,即:

第2激光测距仪液位数据亦中位均值滤波得D115Average

船闸上游右岸第1激光测距仪液位数据的中位均值滤波,即:

船闸闸室液位检测装置、船闸下游液位检测装置的“二乘二取二”水位计液位检测流程,与船闸上游液位检测装置类同。
激光测距仪参数:最大测量范围:10 m;精度:±3 mm;测量方式:连续测量;数据采集时间:1 s;防护等级:IP55,可有效防淋雨;技术参数输出:4 ~ 20 mA模拟量输出、RS485、网口、RS232、USB、GSM模块。
船闸上游左岸液位检测装置和船闸上游右岸液位检测装置互为备份,由主备检测切換变量check 100控制切換;check 100 = 110时,船闸上游左岸液位检测装置的2支激光测距仪检测上游液位、液位数据中位均值滤波、“二乘二取二”表决,若2支激光测距仪的检测数据偏差< ESP、输出检测的液位,反之check 100 = 120、船闸上游右岸液位检测装置转为检测状态、故障报警;check 100 = 120时,流程与check 100 = 110类同;通过“二乘二取二”液位检测系统,检测出船闸上下游和闸室的水位。船闸闸室液位检测装置、船闸下游液位检测装置的“二乘二取二”水位计液位检测原理,与船闸上游液位检测装置类同。“二乘二取二”水位计液位检测的原理见图6。
4 结 语
本文对船闸液位检测系统结构上进行了根本性的改变。利用“二乘二取二”结构的激光测距仪液位检测装置和“二乘二取二”液位信号算法处理;消除了传统水位计的缺陷,“二乘二取二”技术提高了液位检测的精度和可靠性,使得船闸运行可靠性大大提高,节省了人力资源在维护上的投入,并为船闸运行快速,准确调度提供了保障,在更深层次发挥了其综合效益。
图5 “二乘二取二”水位计液位检测流程图
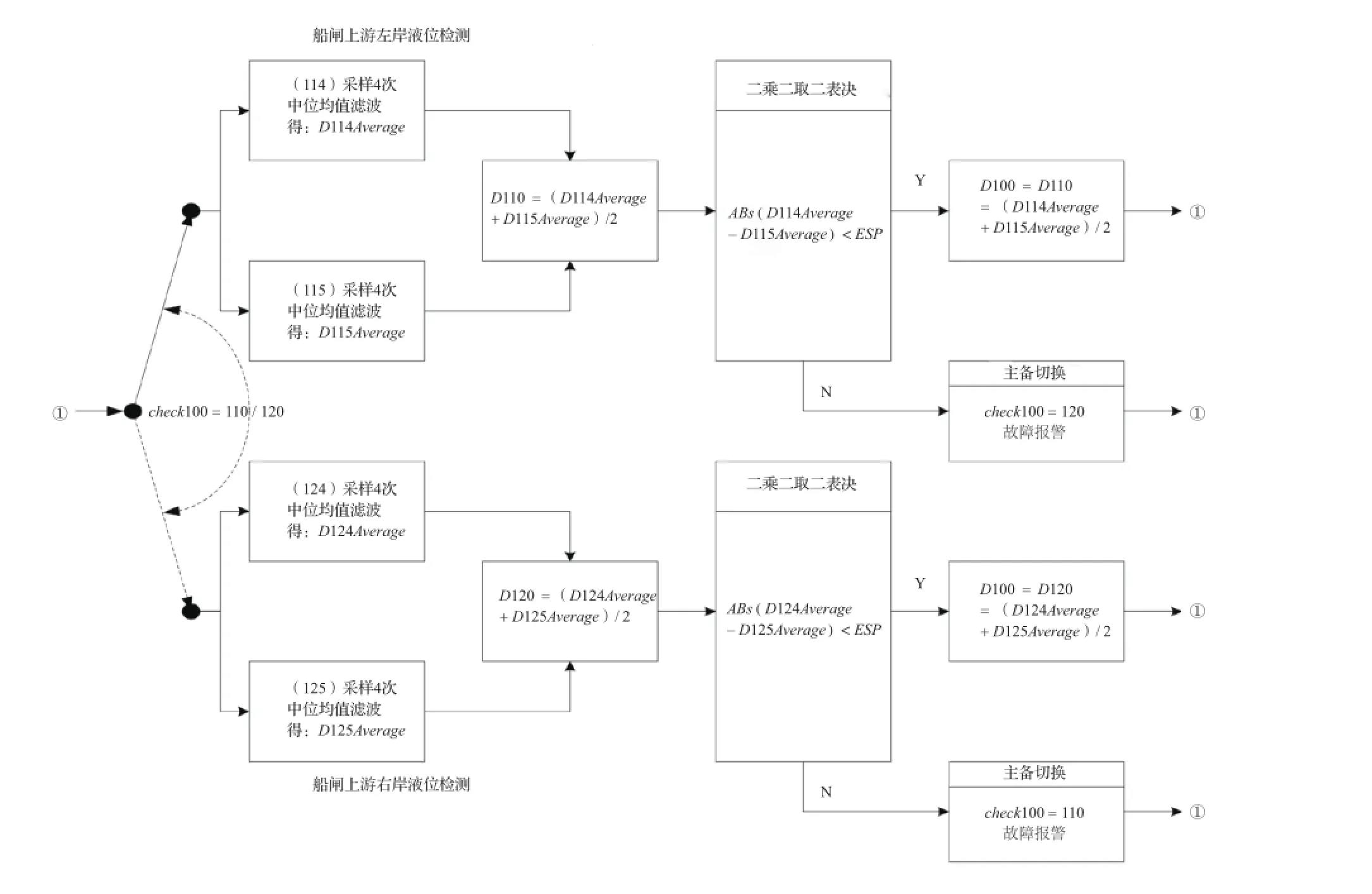
图6 “二乘二取二”水位计液位检测的原理图
[1] 蒋本雨.压力传感器性能参数问题[J].传感器世界,1999(12):31 - 35.
[2] 李翔.“二乘二取二”冗余机制研究[D].成都:西南交通大学控制工程学院, 2012:5.
[3] 薛刚.基于“二乘二取二”的列车惰行控制研究与分析[D].北京:北京交通大学电子信息工程学院, 2013:3.
[4] 张晓林,施银清,张晗秋.水库及船闸水位激光监测系统的原理与实践[J].水电自动化与大坝监测,2009(3):76 - 79.
[5] 陈永刚,黄涛.船闸水位与水位差值激光检测系统的原理与实践[J].山东交通科技,2010(1):63 - 68.
[6] Wong K K,Ho T K. Coast Control of Train Movement with Genetic Genetic Algorithm[J]. Evolutionary Computation ,2003(2):1280 - 1287.
(责任编辑 姚小槐)
TP273
B
1008 - 701X(2017)03 - 0084 - 05
10.13641/j.cnki.33 - 1162/tv.2017.03.024
2016-11-22
陆乙君(1986 - ),男,工程师,硕士,主要从事水利信息自动化研究。E-mail:332378294@qq.com
猜你喜欢
交通科技与管理(2022年9期)2022-05-24 23:28:07
水运工程(2020年2期)2020-02-26 06:06:42
测控技术(2018年12期)2018-11-25 09:37:26
水利科技与经济(2017年8期)2017-04-22 02:41:08
价值工程(2017年8期)2017-03-25 10:16:21
卷宗(2017年1期)2017-03-17 09:14:36
科技视界(2016年16期)2016-06-29 20:57:07
石油石化节能(2016年12期)2016-06-28 16:30:31
水利科技与经济(2016年6期)2016-04-22 05:07:36
中国设备工程(2015年5期)2015-12-27 12:34:53
