
核电DCS控制系统中PID控制无扰切换的方法
2017-06-05 15:02张方杰,王强,陶翠
自动化博览 2017年1期
核电DCS控制系统中PID控制无扰切换的方法
本文针对核电DCS控制系统,提出了实现PID控制无扰切换的方法。首先介绍了PID控制器无扰切换的概念和常用的方法,然后给出了在福清核电项目中利用I/A Series设计的PID控制模板,并说明了在模板中如何实现PID控制器手动控制和自动控制之间的无扰切换。最后对项目中遇到的一个超弛控制问题,给出了初步的PID控制方案,并分析了其无法实现无扰切换的原因。通过对其进行改进,新的控制方案不仅实现了超弛控制的功能,也实现了超弛控制与PID自动控制和手动控制之间的无扰切换。
核电;DCS;PID;无扰切换;I/A Series;超弛控制;
DCS已广泛应用于电力、石化和冶金等行业,近些年来也已经开始在核电站中得到应用。比例-积分-微分(PID)控制器是自动控制中最经典的控制方法。本文介绍了PID控制器无扰切换的概念和方法,并以福清核电站所采用的I/A Series DCS系统为背景,对核电站中典型的PID控制原理以及无扰切换的实现方法进行阐述,并提出了改进建议和措施,以满足无扰切换的要求。
1 无扰切换的概念和方法
无扰切换是指在手动与自动切换的瞬间,保持控制器的输出信号不发生突变,以免切换给控制系统带来干扰。根据文[1,2],PID控制器无扰切换的常见实现方法是:
(1)当控制器处于自动控制模式时,阀位手动控制的给定值应该始终跟踪PID控制器的输出值。这样才能保证当从自动控制切换到手动控制后,阀位手动控制的初始值等于切换前PID控制值,操作员是在原有的PID控制器输出的基础上设置手动给定值,可以避免大的扰动;
(2)当控制器处于手动控制模式时,PID控制器的输出应跟踪手动给定值。这样才能保证当从手动切为自动的时候,PID控制器的初始输出等于手动给定值,不会造成执行机构大幅动作。
以上是常见的PID控制器无扰切换方法,在福清核电的DCS控制系统中,用I/ASeries实现了PID控制器的无扰切换。
2 I/A如何实现无扰切换
福清核电项目中,设计开发了PID控制模板,实现了无扰切换的功能,如图1所示。

图1 PID控制器模板
图1 中通过001MT(模拟量变送器)获得来自现场的测量值,001RG是PID控制器,001RG_SW1是切换模块,即根据切换命令Toggle选择两个模拟量输入INP1和INP2中的一个作为切换模块的输出,切换将致使上游模块初始化其输出为切换模块的当前输入。HMI是人机界面,用于设置手动控制参数。001RG_ O是计算块(通过编程实现逻辑和计算功能),用于手动控制无扰切换。参数BCALCI和BCALCO是专门用于信号反传,当AO输出模块AOUTR故障或SWCH切换模块切为HMI输入时,PID控制器会判断其下游的回路被断开,并自动从自动模式转到跟踪模式,BCALCO会将下游模块的输出通过BCALCI端口反馈给PID控制器,而PID控制器会强制其输出等于BCALCI反传回的值[3,4]。
当PID处于自动模式时,001RG_O起到了跟踪PID输出的作用,其原理如表1所示。

表1 001RG_O块的原理
001RG_O.ROUT是001RG_O的模拟量输出,001RG_O.RIN是001RG_O的模拟量输入。从表1可以看出,当处于自动控制模式时,001RG_O会自动跟踪001RG_SW1模块的输出,即PID的输出,因此当从自动切换到手动的时候,就不会存在扰动。
同时,当PID控制从自动切换到手动时,流程如图2所示。

图2 自动切换到手动流程图
从图2中可以看出,当PID模块检测到下游回路被断开以后,就会从自动模式转换到跟踪模式,此时PID控制器的输出是等于手动设置值INP1的。当从手动控制再切换回PID自动控制时,就不会有扰动发生。
3 实际应用
上节只是描述了最简单的PID控制器无扰切换的方法,但是在整个福清核电项目设计过程中,有很多不同类型的控制回路,下面就针对工程项目中遇到的特殊情况,说明在实际的情况下如何实现无扰切换。
3.1 蒸汽转换器除氧器压力控制
为了保护执行机构和系统,经常会根据一些报警信号来强制执行机构全开或者全关,以便保护整个工艺系统,这种控制就是超弛控制。在蒸汽转换器除氧器压力控制中,除氧器的高高高水位报警作为除氧器压力控制的超弛信号,用于快速关闭入口蒸汽减压阀STR001VV。
3.1.1 初始控制方案
为了实现超弛控制,首先利用I/A的PID模板设计了初始的控制方案,如图3所示。
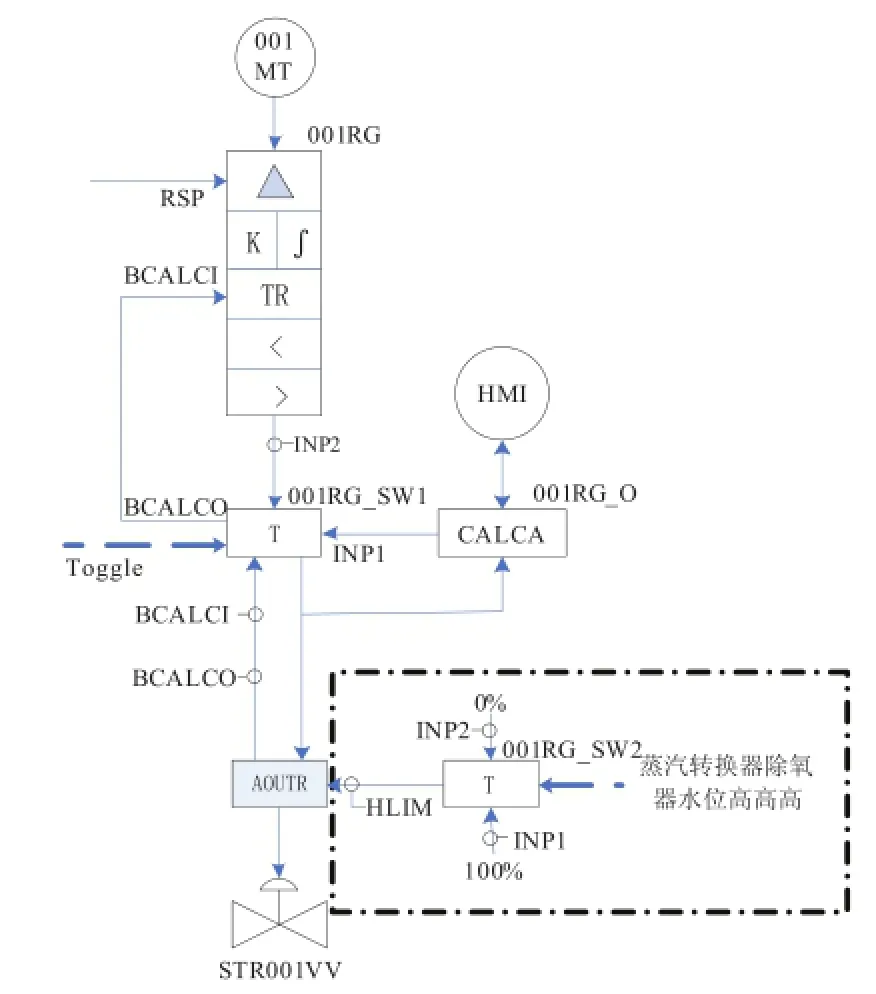
图3 I/A超弛控制初始方案
图3 中,AOUTR块是模拟量输出模块,其高限值参数为HLIM。AOUTR默认的高低限值分别为100%和0%,即不管AOUTR的输入是多少,其输出最大是100%,最小是0%。在图3中右下角的虚框中,在标准的PID模板上又加入了一个切换模块001RG_SW2,该模块的输出连接到AOUTR块的HLIM端口。
在正常运行情况下,当超弛信号“蒸汽转换器除氧器水位高高高”为0时,001RG_SW2的输出等于INP1,AOUTR模块的HLIM参数等于100%,系统正常运行。当报警发生时,超弛信号从0变为1,导致001RG_SW2的输出从INP1切换到INP2,即输出从100%切换到0%。此时AOUTR的高限值HLIM等于0%,而低限值本来就等于0%。这样的话,不管AOUTR的输入是多少,即不管PID控制器的输出是多少,AOUTR的输出都等于0%,阀门关闭。
这个方案在不破坏原有PID模板的基础上,实现了超弛控制,但是该方案的问题在于没有实现无扰切换。例如当超弛信号消失时,AOUTR的高低限值立刻恢复到默认值,AOUTR的输出立刻从0%恢复到PID控制器的输出,会导致工艺系统大幅的振荡。因此为了解决无扰切换的问题,提出了新的改进的方法。
3.1.2 最终控制方案
根据I/A的PID块的特点,当处于超弛状态时,必须强制PID控制器切换到跟踪模式,这样才能强制PID控制器跟踪超弛控制输入。为了达到这个目标,需要打断PID控制器到AOUTR之间的回路,因此可以在PID和AOUTR中再加一个切换模块,当超弛信号出现时,切换模块切换到超弛输入,BCALCO会将切换模块的切换信息层层反传给PID,PID控制器会判断其正常工作的回路被断开,从而迫使PID控制器切换到跟踪模式,以实现跟踪超弛控制输入。这样就可以解决PID自动控制与超弛控制之间的无扰切换问题。
根据这些要求,设计了最终的超弛控制方案如图4所示。
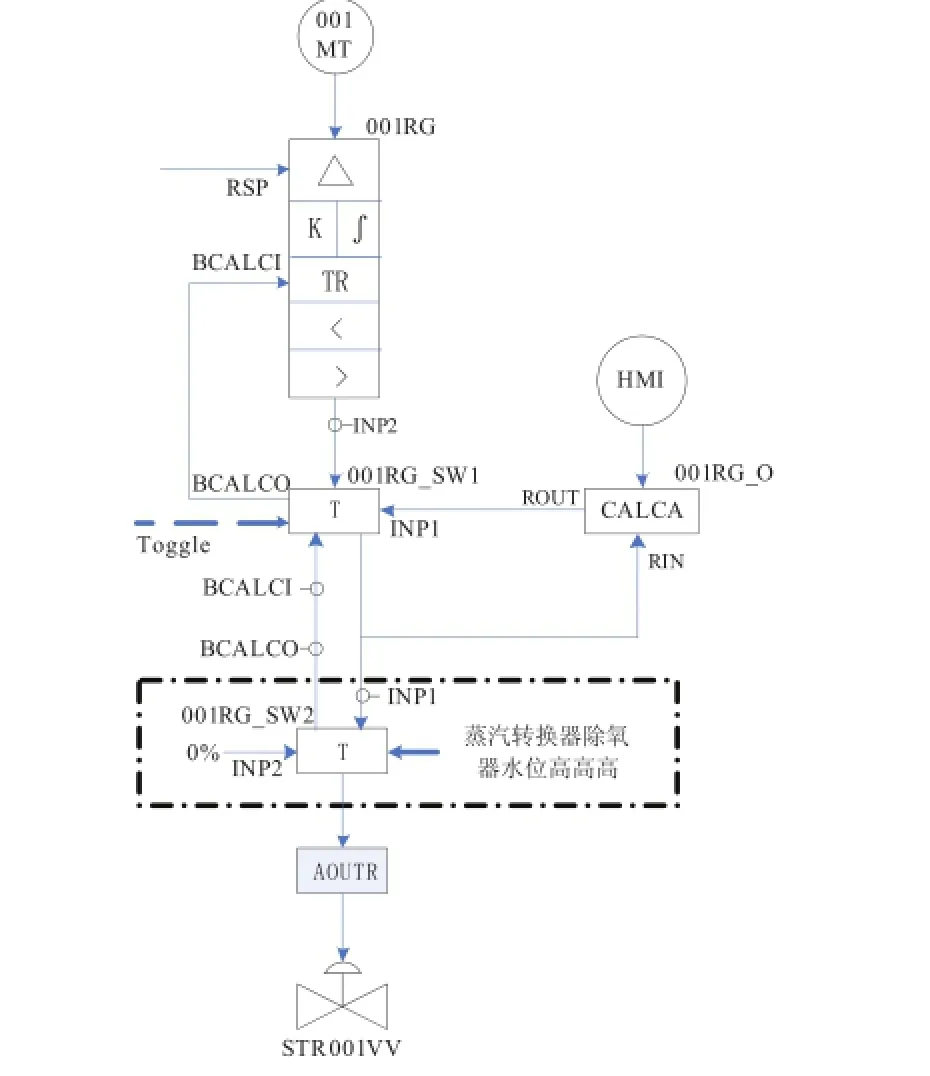
图4 I/A设计的超弛控制最终方案
从图4可以看出,在001RG_SW1与AOUTR之间加入了切换模块001RG_SW2。由于加入了切换模块,当系统处于自动控制时,当超弛信号“蒸汽转换器除氧器水位高高高”为1时,001RG_SW2的输出从INP1切换到INP2,输出为0%。
001RG_SW1检测到下游回路断开,切换到跟踪模式,PID控制器也切换到跟踪模式,PID控制器停止运算。同时通过BCALCO将001RG_SW2的实际输出反馈给PID控制器,此时PID控制器的输出等于超弛控制0%。当超弛信号消失,001RG_SW2重新切换到INP1作为输出时,PID控制器恢复自动控制模式,并以0%为初始值开始运算。这样就避免了超弛控制与自动控制之间切换时的扰动。
而对于手动控制来说,当001RG_SW1检测到下游回路断开时,也会自动切换到跟踪模式,因此当切换到超弛控制以后,001RG_SW1的输出等于超弛控制值。因此可以对001RG_O的程序进行改造,当从手动控制模式切换到超弛控制模式时,强制001RG_O. ROUT = 001RG_O. RIN,这样的话手动控制一直跟踪超弛输入,当从超弛切换回手动控制时,就能够实现无扰切换。
4 结语
PID控制器已经被广泛地应用在核电领域,但无扰切换一直是PID控制设计中需要考虑的重要问题。本文首先介绍了无扰切换的概念和方法。同时结合福清核电项目和I/A DCS,介绍了PID的标准模板,并详细说明了模板中如何实现自动和手动控制的无扰切换。最后给出了一个项目中遇到的超弛控制的案例,首先给出了超弛控制的初步方案,但是发现该方案虽然实现了超弛控制的功能,但是并没有实现无扰切换。因此对该方案进行了改进,在控制回路中加入了切换模块,不仅很好地实现了超弛控制,而且实现了无扰切换。该方案已经过现场调试,并在福清核电现场得到了应用。AP
[1] 谭磊, 栾振华, 杨宗伟, 李贤民, 唐必辉. CPR1000核电厂PID控制无扰切换研究[J]. 核动力工程, 2013, 34(S2): 27 - 30. [2] 李公杰, 田骏, 王钊. CPR1000新项目DCS手自动无扰切换实现研究[J]. 核科学与工程, 2010, 30 (12): 82 - 86.
[3] B0193AX. I/A Series Integrated Control Block Descriptions[M].
[4] 查方兴. I/A Series系统及应用[M]. 上海福克斯波罗有限公司, 2009.
This paper presents a bumpless switching method for PID controllers in nuclear power plant DCS control systems. Firstly, concept and common methods of bumpless switching PID controllers are introduced. Then PID control template using I/A Series DCS in Fuqing nuclear power project is presented. Furthermore, we explain how to achieve bumpless switching between PID auto control and manual control in the template. Finally, we provide a preliminary PID control design for the override control in our project, and analyze the reason that the PID control design can't implement bumpless switching. After updating the preliminary PID control design, the new control strategy not only implements override function, but also achieves bumpless switching.
Nuclear power; DCS; PID; Bumpless switching; I/A series; Override control
B
1003-0492(2017)01-0092-04
TP273
张方杰(1981-),男,湖北潜江人,中级工程师,硕士,现就职于中核控制系统工程有限公司工程与服务中心,主要从事核电站仪控系统设计。
王 强(1977-),男,山西太原人,高级工程师,博士,现就职于中核控制系统工程有限公司工程与服务中心,主要从事核电站仪控系统设计。
陶 翠(1985-),女,山东聊城人,中级工程师,硕士,现就职于北京和利时系统工程有限公司验证与确认部,主要从事核电站仪控系统和铁路监控系统验证和确认工作。
猜你喜欢
——福建省福清老年大学校歌(混声合唱)
老年教育(老年大学)(2022年9期)2022-09-27
电子制作(2019年22期)2020-01-14
中学数学研究(江西)(2019年6期)2019-07-08
海峡姐妹(2019年6期)2019-06-26
摄影之友(影像视觉)(2019年3期)2019-03-30
电子制作(2017年13期)2017-12-15
海峡姐妹(2017年4期)2017-05-04
学苑创造·C版(2016年10期)2016-11-19
世界汽车(2016年8期)2016-09-28
世界汽车(2016年8期)2016-09-28
