
弹性欠驱动2-RR(RRPeR)机构及其方向刚度分析
2017-06-01 12:38耿明超任玉灿张灿果倪笑宇河北建筑工程学院机械工程学院河北张家口075000
电子测试 2017年6期
耿明超,任玉灿,张灿果,倪笑宇(河北建筑工程学院机械工程学院,河北张家口,075000)
弹性欠驱动2-RR(RRPeR)机构及其方向刚度分析
耿明超,任玉灿,张灿果,倪笑宇
(河北建筑工程学院机械工程学院,河北张家口,075000)
根据多维运动模拟的需求,提出了一种弹性欠驱动2-RR(RRPeR)机构。该机构利用两个驱动及弹性动力耦合产生三维运动。基于旋量代数,建立机构的运动学、静力学模型,并以此为基础得到了其方向刚度模型。
并联机构;欠驱动;方向刚度
0 引言
交通工具(车辆、船舶等)在行驶的过程中,由于受到外界环境的影响,会产生横摇、纵摇、横荡、纵荡和垂荡等多个自由度的耦合运动。欠驱动机构能够通过较少的驱动来实现多维运动,为人员的适应性训练和设备的试验测试提供平台。
近几年,欠驱动机构的理论研究主要包括欠驱动机构系统特性分析和控制方法两部分。一般将单个2或3自由度串联欠驱动机械臂作为欠驱动系统的研究对象。针对两个欠驱动机构协同抓取物体的情形,刘云辉等将两个欠驱动机构及目标物体看作一个欠驱动并联机构,并对其可控性进行了分析。此外,将弹簧等弹性元件引入到欠驱动机构中,能够通过弹性势能降低控制系统的难度。本文根据多维运动模拟的需求,提出了一种弹性欠驱动2-RR(RRPeR)机构,该机构通过两个驱动分支及动力耦合使其产生三维运动。
1 欠驱动2-RR(RRPeR)机构及运动学分析
2-RR(RRPeR)欠驱动机构如图1所示。R为转动副,下划线代表该运动副为驱动副,Pe为弹性移动副。从图1中可以看出,机构的主体由2个RRR分支组成,分支中第3个R副利用RRPeR闭环子链等效实现。
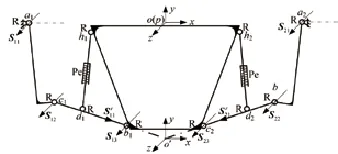
图1 弹性欠驱动2-RR(RRPeR)机构简图
建立定坐标系o-xyz,固连于动平台的动坐标系p-xyz,其初始位姿与定系重合。锁住两个驱动电机后,两个分支分别提供和两个约束力线矢,建立力线矢汇交坐标系o’-xyz,汇交坐标系方位是始终和定系相同,瞬时与定系固连。选取第2分支中的第3个转动副为虚设的驱动副,将欠驱动机构等效为全驱动机构进行分析。令分支关节变量为ö=(ϕ1ϕ2ϕ3)T,当把分支中的第3个转动副转换为相应移动副时,关节变量表示为φ=(ϕ1ϕ2l3)T,根据余弦定理可以得到ö与φ的换算关系。
为了简化表示,采用3维旋量对平面机构进行分析。RRR分支的运动螺旋为Si1=(1 aiy−,Si2=(1 biy−bix)T,Si3=(1 ciy−c。其中,(aixa, (bixbiy)T和(cixciy)T分别为铰链点ai,bi和ci在定系o中的坐标。φ动平台的旋量速度表示为


式是一个矢量方程,包含3个标量方程。前两个标量方程用来计算关节驱动力τ1、τ2,第3个标量方程则为机构的静力学约束方程。由机构刚度的定义可知,考虑弹性被动关节刚度的柔度矩阵可以表示为

2 欠驱动2-RR(RRPeR)机构静力学及方向刚度分析
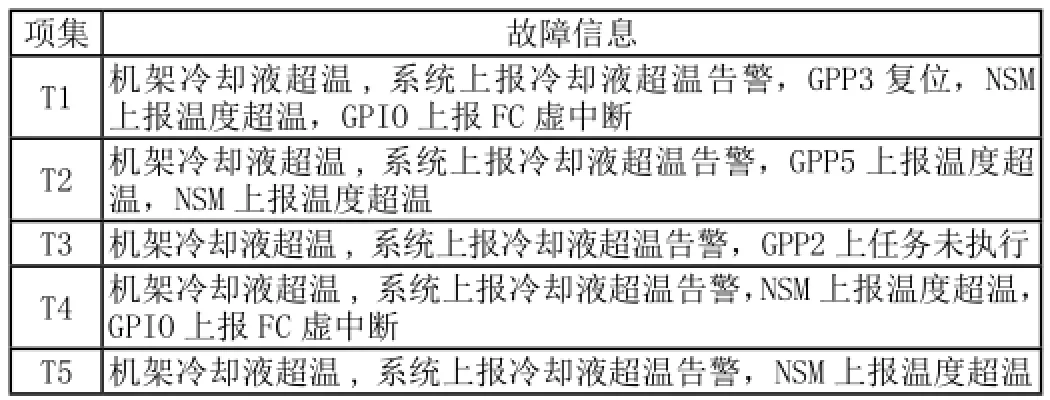
表1 样本一告警信息集
挖掘结果:“机架冷却液超温”与“系统上报冷却液超温告警”和“NSM上报温度超温”之间存在强关联规则,通过该关联规则,如果设备在运行过程中发现NSM上报温度超温,基本可以推断出是由于机架冷却液温度超温造成的,提前采取措施,防止故障进一步扩大影响。
样本二,未知故障原因,告警信息集如表2所示。
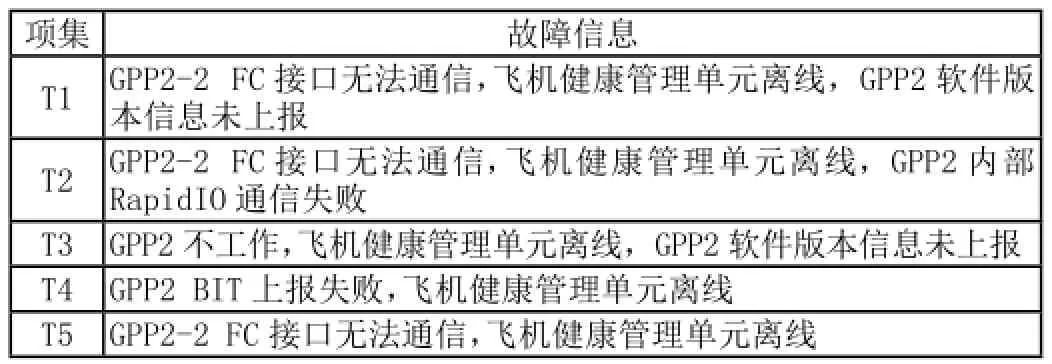
表2 样本二告警信息集
挖掘结果显示,“GPP2-2 FC接口无法通信”与“飞机健康管理单元离线”之间存在强关联关系,虽然不能直接推断出故障原因,但是可以确定“GPP2-2 FC接口无法通信”与“飞机健康管理单元离线”之间的并行关联关系,为故障的预防提供依据。
4 总结
利用关联规则数据挖掘技术,从大量的故障数据中发现更多有用的关联关系,更快、更准的发现故障根源,减少设备调试人员、维护人员的工作量,提高工作效率,为航空电子设备的维护保障提供更好、更有效的维护手段和方法。关联规则挖掘的缺点是故障数据库中的数据量非常大,需要较大的计算量,同时产生大量频繁项集,后续需要不断的改进算法提高挖掘效率。
[1]张文静,宋 雨,卢海霞.利用关联规则建立专家系统的知识库[J].计算机技术与发展.2006,2.第16卷 第2期:76-80.
[2]肖光磊等.正相关关联规则及其在中医药中的应用[J].计算机工程与应用.2010,46(6):227-230.
[3]胡 锴,徐巍华,渠 瑜.改进模糊关联规则及其在故障诊断中的应用[J].设计与研究.2008年,第10期:8-10.
Elastic underactuated 2-RR(RRPeR) mechanism and its direction stiffness analysis
Geng Mingchao,Ren Yucan,Zhang Canguo,Ni Xiaoyu
( School of Mechanical Engineering , Hebei Univercity of Architecture,Zhangjiakou Hebei, 075000)
According to the demand of the multi-dimensional motion simulation, a class of elastic underactuated 2-RR(RRPeR) mechanism is put forward Three degrees of freedom of the mechanism is driven by only two drives and the elastic dynamic coupling effects. Based on screws, the kinematics and statics of the mechanism are given, and based on this, the direction stiffness is given. Keywords:Parallel mechanism;Underactuated;Direction stiffness
河北省高等学校青年拔尖人才计划项目(BJ2016017)、张家口市科技计划自筹经费项目(1621009B)、河北建筑工程学院博士科研启动基金项目(B-201603)。
猜你喜欢
中国机械工程(2022年22期)2022-11-25
中国机械工程(2022年7期)2022-04-20
新世纪智能(数学备考)(2021年9期)2021-11-24
中国机械工程(2019年17期)2019-09-19
当代陕西(2019年15期)2019-09-02
学生天地(2019年28期)2019-08-25
数学物理学报(2018年1期)2018-03-26
中国机械工程(2018年4期)2018-03-06
学苑创造·A版(2018年11期)2018-02-01
读者(2017年5期)2017-02-15
