基于混合自动充电技术的智能定位鞋探究
2017-05-25 00:56陈诺凡
海峡科学 2017年3期
陈诺凡
基于混合自动充电技术的智能定位鞋探究
陈诺凡
福州第二中学
针对目前智能定位鞋存在的持续供电时间有限、隐蔽性不强等缺陷,为解决对“走失”人员无间断、持续的安全跟踪,该文就智能定位鞋的混合自充电功能进行了探究。混合自动充电系统由两部分构成,即通过人走动对鞋后跟的压力把机械能转换成电能存储,并在鞋跟两侧安装太阳能光膜把光能转换成电能。
混合充电 法拉第定律 稳压限流 智能定位
随着科技发展的日新月异,定位技术已经发展到了成熟阶段,市面上也有许多可供选择的定位模块,与通讯技术相结合,从定位功能上看并不困难,真正的难度是如何实现长效续航。经调查,现有各类产品的省电模式主要有三种,即开启省电方案尽可能节源、加大电池容量、闪充。智能定位鞋的主要用途是防丢,要实现对老人、孩子和出门在外时间长的人能实现持续定位跟踪,最理想的方案是在不外接电源的情况下实现自充电。利用身边的资源实现自发电,很容易想到利用太阳能光板。经研究分析,一种柔性的太阳能光膜比较适合安装于鞋跟两侧。但在进一步实验中发现,光伏的输出电压受光强影响,输出电压差值大,如若在阴雨天,则无法有效充电,还需要另一种自充电方式进行补充。于是,笔者联想到小时候的玩具——按压式手电筒、手摇式电风扇(见图1),这两者都可以通过手动的方式进行发电,实际上就是机械能转换成电能的原理,当然要改变机械运动的方式。

图1 手动发电参考
1 混合动力模块设计
自动充电电路由两部分构成:第一部分是通过人体走动对鞋后跟的踩压,把机械能转换成电能,第二部分在鞋帮两侧加上太阳能光膜的设计,把光能转换成太阳能,达到自动获取电能、持续使用的效果。
智能定位鞋的整体结构可选择放置左/右脚,两只脚结构略有不同,可以实现一边模块使用、另外一边备用的功能,必要时左右脚定位模块可以互换,具体结构框图见图2~图3。
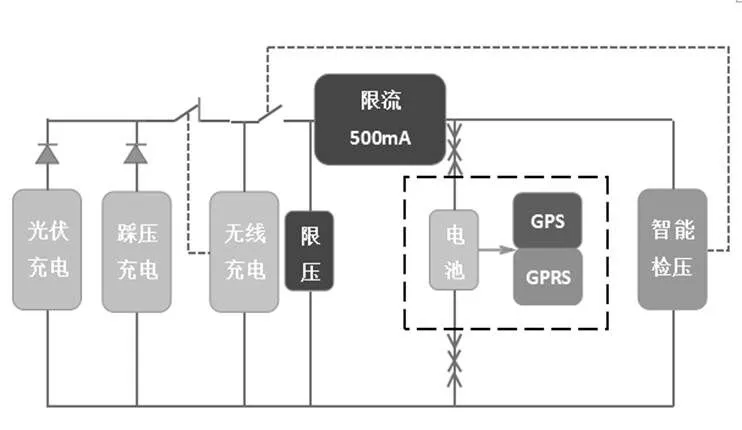
图2 定位鞋左脚结构框图
1.1 机械能转电能模块
1.1.1机械能转电能模块原理
本模块通过运用法拉第电磁感应原理,让棘轮机械结构产生单一方向的旋转,产生一个旋转磁场,让线圈和磁场发生相对运动,线圈中的磁通量发生变化,磁通量变化是电磁感应的根本原因,产生感应电动势是电磁感应现象的本质。因此,当环形线圈中的磁通量变化时,会在导体上产生感应电流。根据感应电动势公式可以得出,产生的电压与磁通量变化成正比,与频率成正比,当旋转磁场变化的速度越快,产生的感应电动势越大,具体电磁感应原理见图4。

图4 电磁感应发电原理图
1.1.2机械能转电能模块结构
本模块内部包含磁条一个、齿轮一只、回复弹簧一只、啮合机构一组、发电线圈、磁铁一对,以及一只储能电池。主要利用了棘轮机构的特征以及配套电路设计。本模块中的棘轮机构主要由主动摆杆、棘爪、棘轮、止回棘爪和机架组成。棘轮机构的条件与一个固定的从动轴相连,并和结构中的棘爪部分相连接。当整个机构按压的时候,机构顺时针方向旋转,此时棘爪在棘轮的齿背上滑动。当整个棘轮机构逆时针方向运动时,止回棘爪阻止棘轮机构逆时针运动,而驱动棘爪却能够在棘轮齿背上滑过,这时棘轮静止不动。因此,当整个机械结构作连续的往复摆动时,棘轮作单向的间歇运动。
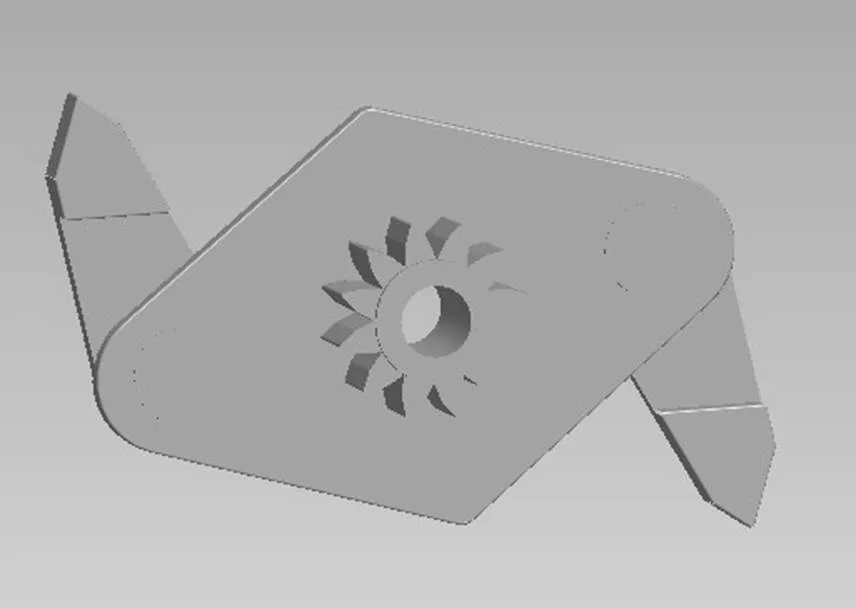
图5 棘轮机构原理图
棘轮机构与齿轮结构相同,根据公式=,利用模数作为齿轮有关尺寸选择的基本参数,而棘轮标准模数的确定主要参照顶圆直径这一参数,另一个重要参数一般由棘轮机构的使用条件和运动要求选定。参数的选择是由机械结构的进给和分度为依据,可以根据棘轮最小转角,一般取= 8~16,然后选定模数。在该系统中,棘轮设计齿数=12,机构的模数选取=2,测算出整个棘轮机构的顶圆直径为=24mm,根据定位鞋的实际安装尺寸,适当调整棘轮尺寸参数。
1.1.3机械能转电能模块制作
整个机械传动结构由棘轮、传动轴、脚踩柄等部分构成,棘轮安装在鞋跟底部位置,传动轴的固定由3D打印出的柱子来完成。轴是支撑转动零件并与之一起回转以传递运动、扭矩或弯矩的机械零件。轴的设计要考虑轴的功能使用要求、材料、轴的制造工艺、价格、尺寸等方面的要求,所设计的轴是用来支撑棘轮转动的。轴的材料选择 45号钢,在制造工艺方面可以选择正火处理或调质处理,正火处理是将钢材或钢件加热到Ac3或Ac3以上适当温度,保温适当的时间后在空气中冷却,得到珠光体组织的热处理工艺,其目的在于使晶粒细化和碳化物分布均匀化。调质处理是钢材在淬火后加高温回火,目的是使调质后的零件具有优良的综合机械性能。但由于45号钢正火处理价格更便宜,且也能满足轴的功能使用要求,所以选择正火处理。机械传动结构是机械能转化电能的关键部分,该部分运用法拉第电磁感应原理,通过棘轮机构单向旋转,使线圈与磁铁产生相对运动,产生感应电流,达到给GPS模块供电以及充电的目的。

图6 传动轴结构图
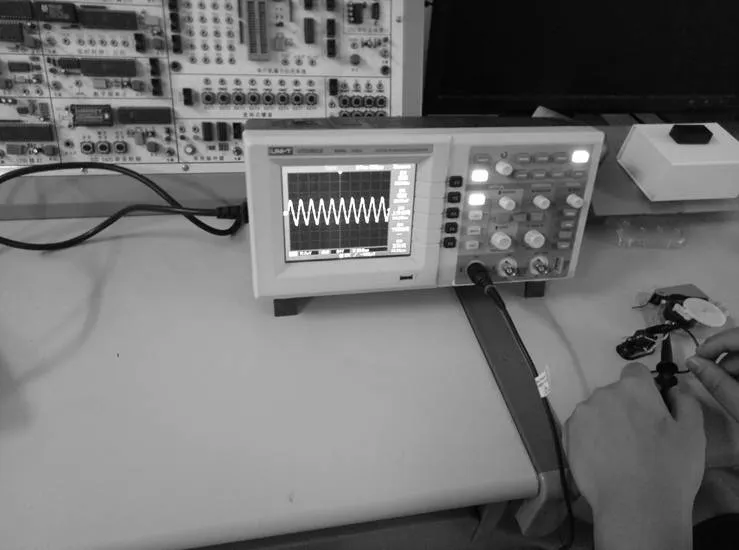
图7 机械能转电能模块输出波形图
1.2 太阳能转电能模块
1.2.1太阳能转电能模块原理
太阳能转电能主要应用的原理是光伏效应,它的发电方式有两种,一种是光—热—电转换方式,另一种是光—电直接转换方式,本文选择的是光—电直接转换方式。太阳能电池是一个对光有响应并能将光能转换成电能的器件。能产生光伏效应的材料有许多种,如单晶硅、多晶硅、非晶硅、砷化镓、硒铟铜等。它们的发电原理基本相同,现以晶体为例描述光发电过程。P型晶体硅经过掺杂磷可得N型硅,形成P-N结。当光线照射太阳能电池表面时,一部分光子被硅材料吸收;光子的能量传递给了硅原子,使电子发生了越迁,成为自由电子在P-N结两侧集聚形成了电位差,当外部接通电路时,在该电压的作用下,将会有电流流过外部电路产生一定的输出功率。这个过程的实质是光子能量转换成电能的过程。
1.2.2太阳能转电能模块设计与制作
考虑到目前市面上的5V太阳能充电面板体积较大,无法满足安装需求,故采用3片1.5V光伏板串联的方式提升电压。同时为了防止弱光环境下光伏板电压过低,出现逆流,在光伏板的输出部分串接了一个肖特基二极管,利用其单向导通的原理制止逆流。便携式太阳能备用电源以太阳能为转换来源,将太阳能转换成电能,将电能通过锂电池进行存储,以达到智能定位鞋户外供电的目的。本设计采用了3块太阳能软板来完成电压供给,输出电压为0~6V之间,输出电流为350mA左右。太阳能软板并联安装在鞋跟的两侧,外面嵌入透明塑料达到防水的目的,这种设计很好地满足了智能定位鞋供电需求。

图9 单片板有光下的电压测试

图10 鞋跟边缘软板的安装
2 充电电路模块设计
2.1 电源稳压设计
串联得到的光伏电源,在强光条件下峰值电压可能突破6V,而由踩压式发电得到的电压也不稳定,需对电源信号进行稳压处理。传统稳压方案通常选择并联稳压二极管的方法,此方法的稳压值易受温度影响。新型稳压方案是使用管理芯片代替单一的稳压管降压,只需与简单的外部元件相配合,就能实现稳压功能,工作稳定,体积小,抗干扰能力强。经过对同类元件的反复比较,最终选定使用TD1410降压芯片来实现降压功能,该芯片可将6~15V的输入电压转换为5V电压稳定输出,降压电路见图10。
2.2电源限流模块设计
稳压模块保障了5V稳定电压的输出,电流最大可达2A。而定位模块的充电需求只有500mA,长期过流容易损毁元件,因而需接入限流环节。BQ24202采用八脚MSOP封装,是一种常用于锂电子电池或锂聚合物电池的充电器,正好能够满足本设计的要求。稳压模块与降压模块相配合,给充电过程加上了双重保护。
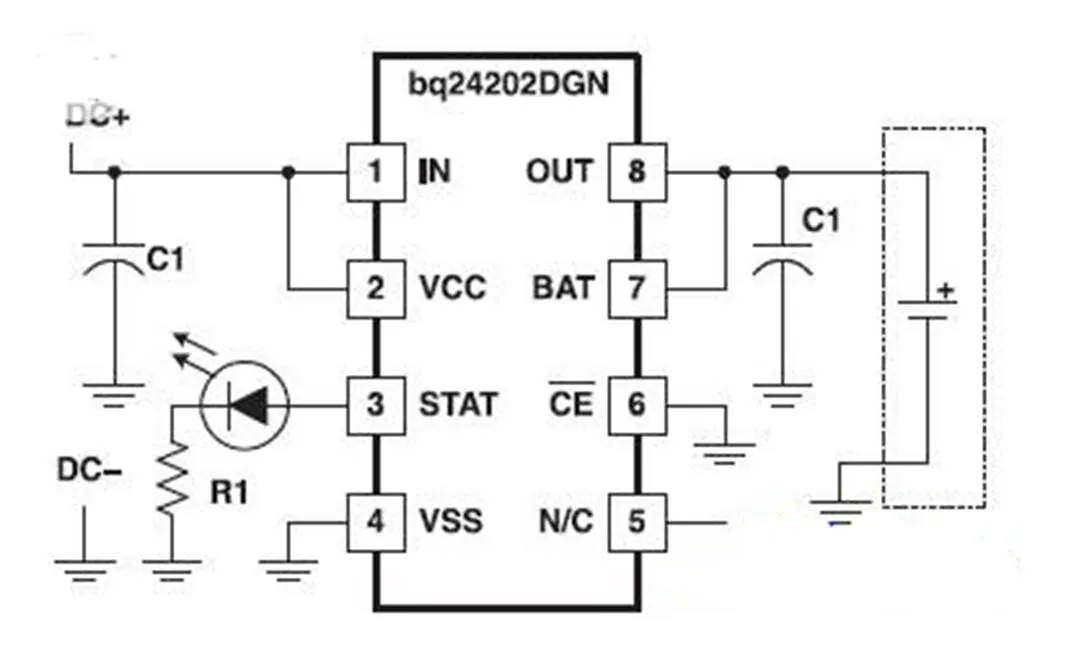
图12 电源限流电路图
2.3 电压检测模块设计
智能定位鞋电源模块电压检测应用了TL431这块芯片,它是一款可控的精密稳压源。它的输出电压用两个电阻就可以任意设置从Verf(2.5V)到36V范围内的任何值,其内部含有一个2.5V的基准电压,所以当在REF端引入输出反馈时,器件可以通过从阴极到阳极很宽范围的分流,控制输出电压。TL431可等效为一只稳压二极管,当输入电压增大,输出电压增大导致了输出采样增大,这时内部电路通过调整使得流过自身的电流增大,这也就使得流过限流电阻的电流增大,这样限流电阻的压降增大,而输出电压等于输入电压减去限流电阻压降,输入电压增大与限流电阻压降增大使得输出电压减小,实现稳压。电源模块电压检测电路见图13。
由图13可知,用IC内部2.5V基准电压监视蓄电池电压的高低。假设现蓄电池正在充电,也就是9013导通,继电器K吸合;当蓄电池电压上升至5V时,A点电位升至2.5V,TL431导通,B点电位降至0.2V,9013截止,继电器K1-1断开充电电源,充电结束。同时,C点电位上升牵动A点电位也上升,进一步锁定TL431在导通状态。当蓄电池使用至3.9V时,A点电位小于2.5V,TL431截止,B点电位上升,使9013导通,继电器K吸合,接通5V电源,新一轮充电又开始。当蓄电池电压上升至5V后,又停止充电,如此反复循环。出于缩小体积的考虑,上图中的继电器K也可换成贴片式光耦继电器。
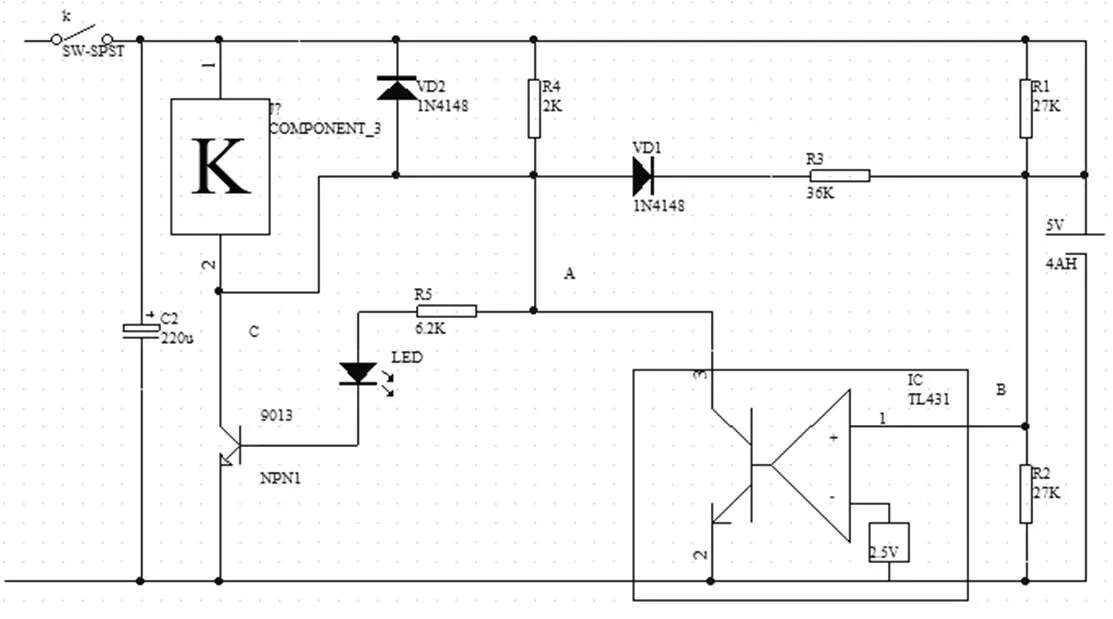
图13 智能检压电路图
3 智能定位鞋模型的设计与制作
3.1 定位鞋模型的建模
智能定位鞋的制作主要分为建模和打印两个部分。定位鞋的鞋跟部分建模利用了SolidWorks软件,该款软件使用了Windows OLE技术、直观式设计技术、先进的parasolid内核(由剑桥提供)以及与第三方软件集成的技术,是一款适用性很强的软件。在建模时,充分考虑到了机械能转电能模块的安装位置,以及太阳能转电能模块的安装位置,同时把GPS模块的固定位置设计成活动式,以方便模块的维护。
鞋模的打印采用了市面上主流的3D打印技术,3D打印属于快速成型技术的一种,它是一种数字模型文件为基础,运用粉末状金属或塑料等可粘合材料,通过逐层堆叠累积的方式来构造物体的技术。本设计利用光固化打印机进行打印,将SolidWorks相应形状与规格的鞋底模型转成STL文件后,导入打印机控制软件UP!中进行打印层高、填充密度等相关设置。层高越高,密度越大,打印精度就越高,相应的打印时间就越长。

图14 智能定位鞋鞋跟建模
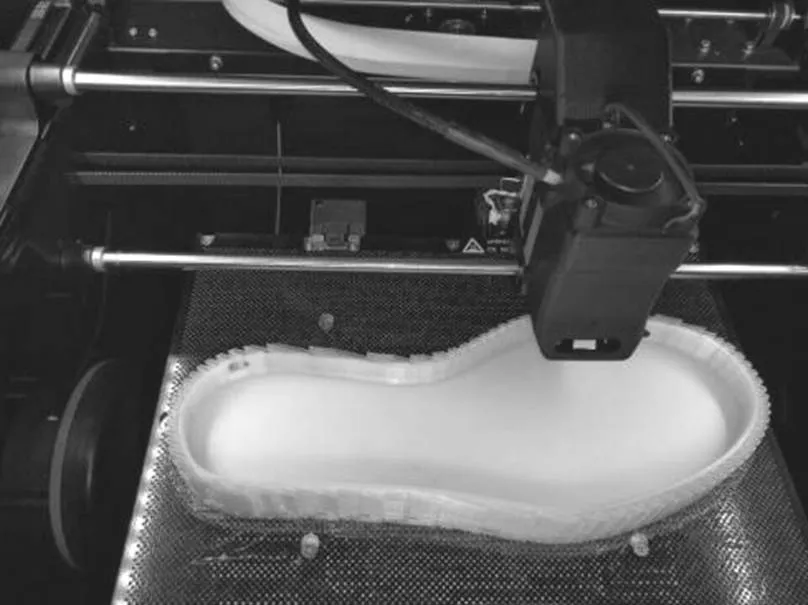
图15 模型鞋跟3D打印
3.2 定位模块的安装与调试
定位模块使用MTK芯片,核心STM贴片技术以及高精度PVB板,体积小、外壳强度高,功能齐全。

图16 微信调试图

图17 短信以及客户端调试
[1] 童诗白. 模拟电子技术基础[M]. 4版. 北京:高等教育出版社, 2006.
[2] 国家教育部. 中小学理科教学仪器和电教器材配备目录[Z].
猜你喜欢
电力自动化设备(2022年11期)2022-11-19
装备维修技术(2022年7期)2022-07-01
电气技术(2022年1期)2022-01-26
东北大学学报(自然科学版)(2021年1期)2021-01-15
广东电力(2020年12期)2021-01-05
少儿科学周刊·少年版(2020年9期)2020-03-04
探测与控制学报(2015年4期)2015-12-15
安徽化工(2015年4期)2015-12-12
中国科技信息(2015年18期)2015-11-10
舰船科学技术(2015年8期)2015-02-27