一种基于HLA的交会对接动力学仿真系统设计与实现
2017-05-24 10:33安宜贵董正宏
科技创新与应用 2017年13期
关键词:体系结构
安宜贵+董正宏

摘 要:采用HLA作为交会对接动力学仿真的体系结构,首先设计了交会对接动力学仿真系统的仿真流程和FOM/SOM设计方法,提出了实时与延时相结合的自适应时间管理技术,并测试了其数据交互性能。
关键词:交会对接;仿真系统;体系结构
在航天技术应用中,空间交会对接技术的控制最复杂、变量参数最多,控制难度也最大[1],在任务执行前需要进行大量的验证。构造航天器交会对接动力学仿真系统,验证测控软件的性能和可用性非常必要。HLA(High Level Architecture,高层体系结构)[2]是一个开放的、支持面向对象的仿真体系结构,代表了当今分布式交互仿真技术的主流方向。采用HLA体系结构,仿真分析交会对接动力学问题,已成为当前交会对接研究中最常用的研究手段。
1 交会对接动力学仿真系统结构设计
1.1 系统仿真流程
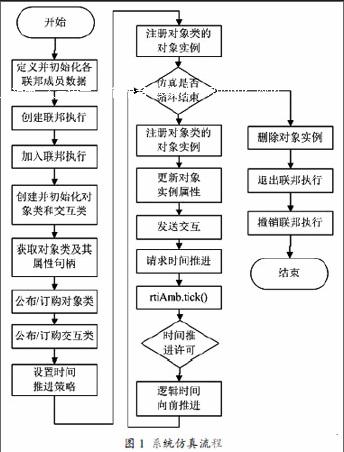
按照HLA联邦成员仿真流程的三个步骤:成员初始化、进入仿真循环、退出联邦[3],设计交会对接仿真系统的仿真流程如图1所示。
1.2 联邦的FOM/SOM设计
HLA定义了两类对象模型,一类是联邦对象模型(Federal Object Model,FOM),一类是成员对象模型(Simulation Object Model,SOM),分别用来描述联邦和联邦成员的特性[4]。根据动力学仿真、GNC仿真、推进系统仿真等重要联邦成员的特性,确定各联邦成员的对象类和交互类以及其公布/订购关系。根据各对象类的属性以及交互类的参数,生成SOM表;综合SOM表,生成FOM;在OMDT(Object Model Development)工具中填写对象表、交互表、属性表、参数表等,即可生成FED文件,完成联邦的FOM/SOM设计。
2 实时与延时相结合的自适应时间管理技术
HLA时间管理服务是在联邦执行时控制时间的推进,使时间推进机制与负责传递消息的机制相配合[5]。交会动力学仿真采用逻辑时间步进与物理时间推进相结合的方式,在实时运行下,逻辑时间步长和物理时间步长均为1s。当进入轨控模式下,GNC采样间隔提高到160ms,逻辑时间步长和物理时间步长提高到160ms,这样就出现了两种变步长的要求。针对这种变步长的要求,提出自适应实时和延时变步长的时间管理技术。
以单航天器动力学仿真三个仿真联邦成员为例(多航天器情况类似)。三个仿真联邦成员分别是GNC仿真、推进系统仿真和动力学模型仿真,变步长的触发点来自GNC仿真,由GNC自主计算或对注入数据反解的发动机工作信息触发自身联邦成员的变步长,GNC将发动机工作信息发送给推进系统仿真;推进系统计算出推力力矩信息给动力学模型仿真,不需要改变步长;动力学模型仿真为GNC仿真提供变步长后相应频率的轨道姿态信息,需要改变步长。
确定开关机数目和每次的开机时间与开机时长为输入参数,自适应变步长算法引入线程管理变步长更动,其伪码如下:
首先根据开关机数目和每次的开机时间与开机时长计算变步长性质;
if(延迟变步长){
把多次的开机时间与开机时长按开机时间排序;
把多次工作时间段中有重合的时间段合并;
把非开机时间段和开机时间段依次计算保存phaseLengthTime数组中;
}
else if(实时变步长){
continusIn = TRUE;
}
创建变步长线程管理多次的更动步长;
变步长线程算法伪码如下:
if(延迟变步长){
for(i=0;i<开关机数目;i++){
sleep(phaseLengthTime[i]);
if(i%2==0)
邏辑步长和物理步长改变为160ms;
else
逻辑步长和物理步长改变为1s;
}
}
else if(实时变步长 && continusIn){
逻辑步长和物理步长改变为160ms;
while(continusIn){
continusIn = FALSE;
sleep(160);
}
sleep(1000);
}
3 数据交互性能测试
3.1 测试工具
RTI是HLA仿真系统运行的核心支撑软件,其性能直接关系仿真系统成败,目前尚没有能全面测试RTI性能的专用软件[6]。我们结合课题研究开发了性能测试工具,包含两个通用的测试成员,分别负责发送和接收,具有以下功能:提供6个性能指标测试模块;每个测试模块都具有统计次数、运行参数和结果统计输出等功能。
3.2 测试结果
测试实验主要对对象类、交互类的数据传输速度、数据丢包率进行测试。测试环境为:服务器配置为SUN V890,SUN Solaris系统,标准C++。微机配置为CPU P4 3.0G,内存1G,网络100M,WinXP系统,VC++。RTI采用某研究所的SSS-RTI。
3.2.1 测试方法
对象类成员传输属性更新和交互类实例传递的最大速率受到发送成员或接收成员的限制。对象类成员传输属性更新中对发送成员,更新属性吞吐量由每秒发送updateAttributeValue()(UAV)的次数来测量;对接收成员,反射属性吞吐量由每秒接收reflectAttributeValues()(RAV)的次数来测量。两个平均速率的最小值表示为属性吞吐量。交互类实例发送中对发送成员,实例发送吞吐量由每秒发送sendInteraction()(SI)的次数来测量;对接收成员,实例接收吞吐量由每秒接收recieveInteraction()(RI)的次数来测量。两个平均速率的最小值表示为交互参数吞吐量。
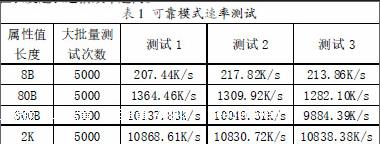
3.2.2 测试结果
测试中传输方式分为可靠模式和快速模式。属性的长度分为8B、80B、800B、2K四种,实验中进行大批量突发性测试(5000次)。可靠模式测试结果如表1所示,试验中未发现丢包现象,实验数据表明通信效率和属性长度有关系,属性长度越小通信效率越差,属性长度越长通信效率越高。
快速模式测试结果如表2所示,快速模式传输数据的速度比可靠模式稍高,通信效率和属性长度的关系和可靠模式一致。其中快速模式的丢包现象主要和rti.inf文件udpsockmanager设置相关,需要根据每秒发送或接收的数据量调整udpsockmanager中发送缓冲池或接收缓冲池的大小,以免淹没数据。
4 结束语
设计了交会对接动力学仿真的仿真流程和FOM/SOM,提供了基于HLA交会对接动力学仿真体系结构的基础,针对交会对接动力学动真变步长的特点,提出一种自适应实时和延时变步长处理方法。设计了RTI性能测试工具,大大降低了直接使用RTI软件的风险。
参考文献
[1]郑永煌.空间交会对接技术[J].自然杂志,2011,33(6):311-315.
[2]IEEE Standard for Modeling and Simulation(M&S)High Level Architecture(HLA)-Framework and Rules(IEEE Std 1516-2000)[M].USA:The Institute of Electrical and Electronics Engineers,Inc,2000.
[3]胡杰,黄长强,刘安,等.基于HLA的脉冲修正火箭弹仿真平台设计[J].系统仿真学报,2009,21(5):1324-1328.
[4]周彦,戴剑伟.HLA仿真程序设计[M].北京:电子工业出版社,2002.
[5]刘步权.分布式仿真运行支撑平台中时间管理服务的研究[D].长沙:国防科技大学,2004.
[6]孙世霞,黄柯棣.RTI性能测试分析[J].系统仿真学报,2005,17(4):909-913.
猜你喜欢
高教学刊(2022年13期)2022-05-24
中国信息化(2022年4期)2022-05-06
卷宗(2016年10期)2017-01-21
科教导刊·电子版(2016年28期)2017-01-10
电子技术与软件工程(2016年22期)2016-12-26
中国新技术新产品(2016年23期)2016-12-26
电脑知识与技术(2016年28期)2016-12-21
科学与财富(2016年28期)2016-10-14
考试周刊(2016年63期)2016-08-15
考试周刊(2016年52期)2016-07-09