一种临近空间高超声速目标检测前跟踪算法
2017-05-18 07:39王国宏于洪波谭顺成
宇航学报 2017年4期
李 林,王国宏,于洪波,谭顺成
(海军航空工程学院信息融合研究所,烟台264001)
一种临近空间高超声速目标检测前跟踪算法
李 林,王国宏,于洪波,谭顺成
(海军航空工程学院信息融合研究所,烟台264001)
针对传统算法无法对临近空间高超声速目标进行有效检测的问题,提出了一种基于Hough变换和多条件约束的检测前跟踪算法。首先采用时间-径向距离量测(TBD)数据进行Hough变换,将参数空间变量θ作为积累约束条件来避免无效积累,得到目标可能航迹;之后对所有可能航迹进行速度约束和航向约束,进一步剔除虚假航迹和航迹内杂波点;最后对同一目标航迹进行合并,得到最终确认航迹。通过仿真对算法有效性进行了验证,并分析了不同信噪比和杂波密度条件下的算法性能,仿真结果表明,算法能够在杂波环境下对临近空间高超声速目标进行有效检测。
Hough变换;多条件约束;临近空间;高超声速目标;检测前跟踪(TBD)
0 引 言
临近空间高超声速飞行器是指在距离地面20~100千米,以马赫数大于5的速度进行飞行的飞行器。其具有飞行速度快、巡航高度高、突防能力强的作战特点,随着临近空间高超声速飞行器技术的不断成熟及其在军事领域的进一步应用,必将对国家空天安全产生战略性影响[1-3]。因此,针对临近空间高超声速目标的检测跟踪已经成为了一个亟待解决的问题。
近年来,众多学者对这一问题展开了积极研究,文献[4]通过分析高超声速目标运动对雷达检测的影响,提出了一种采用参数估计进行补偿的方法进行目标检测,有效消除了多普勒模糊现象;文献[5]针对临近空间高超声速目标的跟踪问题,提出了一种基于目标轨迹特性分析的三维投影跟踪算法,具有较好的定位跟踪效果。但是,上述文献均是建立在传统先检测后跟踪方法上的,而对低信噪比(SNR)条件下的临近空间高超声速目标检测跟踪问题未进行充分讨论,而检测前跟踪(Track-before-detect, TBD)技术作为一种典型的非相参积累技术,是提高目标SNR进行检测的有效手段。
TBD技术是一种实现微弱目标检测跟踪的有效方法,其不在每次扫描时对目标进行检测,而是对来自同一目标的回波信息进行非相参积累,提高目标的SNR,在获取检测结果的同时,还可以获取目标的航迹[6]。现有的TBD算法主要有:Hough变换(HT)TBD算法、动态规划(DP)TBD算法、粒子滤波(PF)TBD算法等[7-9]。其中,Hough变换由于具有对局部缺损的不敏感,对随机噪声的鲁棒性等优点,使得HT-TBD算法在雷达目标检测跟踪领域应用广泛[10]。
目前,针对常规目标的HT-TBD算法研究已经较为成熟,文献[11-13]首次将Hough变换应用到搜索雷达中,建立了基于Hough变换的低可观测目标检测理论;文献[14]提出了一种针对强杂波环境下基于多维Hough变换的TBD算法,对于直线运动条件下的多目标检测效果较好;文献[15]提出了一种基于遍历Hough变换的弱目标TBD算法,利用不同扫描时刻数据遍历求取目标运动参数的方法,有效提高了检测概率和算法效率。以上算法均能实现对常规目标的有效检测并获得目标航迹,但是对于临近空间高超声速目标,由于其探测距离远,导致目标量测数据相对目标真实轨迹偏差较大[16],并且由于目标飞行速度快,使相关波门增大,造成落入波门内的杂波点增多,使得传统算法很难对临近空间高超声速目标进行有效的检测跟踪。
针对上述问题,本文提出了一种基于Hough变换和多条件约束的临近空间高超声速目标检测前跟踪算法。首先,对量测数据中的时间、径向距离数据进行规格化处理,利用变换后的时间-径向距离数据进行Hough变换,并利用参数空间变量θ作为积累约束条件来避免无效积累,得到目标可能航迹;之后根据目标运动特性设立速度波门与角度波门,对可能航迹进行速度约束与角度约束,对可能航迹进行进一步的筛选;最后对同一目标航迹进行合并,得到最终确认航迹。仿真结果表明,本文算法能够实现对临近空间高超声速目标的有效检测并得到目标航迹。
1 目标模型
考虑点目标运动场景,则k时刻目标状态向量Xk可表示为:
(1)
Xk+1=FXk+Gkvk
(2)
式中:F为状态转移矩阵,Gk为过程噪声分布矩阵,vk为零均值高斯过程噪声。

令zk(x,y)表示k时刻量测点(x,y)的回波能量信息
(3)
式中:δk(x,y)为高斯白噪声,各帧间相互独立,满足δk(x,y)~N(0,σ2),Sk(x,y)为目标在量测时刻k对(x,y)的强度贡献值。
2 算法原理
基于Hough变换的TBD方法通常采用位置量测数据进行变换,但对于临近空间高超声速目标,为保证足够的预警时间,雷达对目标进行探测时,目标与雷达之间的距离通常很远,在雷达的方位角量测精度不高的情况下,所获得的目标位置量测数据误差较大,很难实现对目标的检测跟踪。假设雷达测角误差为△α,目标径向距离为r,则由测角误差引起的目标横向偏差△r为:
(4)
根据式(4),假设雷达测角误差为0.2°,目标径向距离为500km,则目标横向偏差可达到1.7km,根据高斯噪声随机分布准则,目标横向偏差将在(0km,5.1km)内随机产生。可以看出,雷达测角误差对于临近空间高超声速目标位置量测数据影响较大,但目标径向距离数据仅受测距误差影响,精度较高,选用时间-径向距离量测数据可有效避免测角误差影响。
因此本文选用时间-径向距离量测数据进行Hough变换,目标在时间-径向距离平面的运动轨迹可近似为直线,其运动轨迹可表示为:
ρ=tcosθ+rsinθ
(5)
式中:ρ为原点到直线的法线距离,θ为该法线与横轴正向的夹角。
时间数据直接表征了目标运动的时序信息,利用时间信息可以剔除大量不符合运动规律的虚假轨迹。但同时,经过Hough变换后得到的可能航迹中,仍然包含虚假航迹,为进一步剔除虚假航迹和航迹内杂波点,需要在位置量测数据平面内对可能航迹进行速度约束和航向约束。下面给出算法的具体实现过程。
2.1 时间-径向距离平面Hough变换
对接收到的雷达原始量测数据,进行时间-径向距离平面Hough变换,形成可能航迹,主要包括以下几个步骤:
步骤 1. 根据初始虚警概率Pfa设置初始门限,以消除部分杂波影响,得到过门限后的量测数据,包含量测点的距离、方位、时间和能量信息。
步骤 2. 对超过初始门限的量测数据进行规格化处理。文献[17]指出,当数据空间中横纵坐标量级相差悬殊,会使得量级较小一维数据信息丢失,无法实现对目标的有效检测。因此需要求得规格化系数μ,得规格化后的r-t数据(t,r/μ)。
(6)

步骤 3. 将参数空间离散化,分割成大小为Δρ×Δθ的若干小区域,每个小区域的中心点为:
(7)
(8)
式中:△θ=π/Iθ,Iθ为参数θ的分割段数,同理Iρ为参数ρ的分割段数[18]。
步骤 4. 建立参数空间点数积累矩阵和能量积累矩阵,用于存储各参数单元点数积累数据与能量积累数据,并对矩阵进行初始化。
步骤 5. 依次选取步骤2中数据,将其映射到参数空间,得到相应的参数曲线ξ。
步骤 6. 对曲线ξ经过且满足θ∈(θmin,180°-θmin)的参数单元对应的点数积累矩阵和能量积累矩阵进行积累。
(9)
步骤 7. 重复步骤5~6,直到N帧量测数据全部处理完毕,得到参数空间点数积累直方图和能量积累直方图。
步骤 8. 设置点数积累门限和能量积累门限,当参数空间分辨单元的点数积累值与能量积累值均超过预定门限时,认为是有效检测,进行Hough逆映射,得到可能航迹。
2.2 速度与航向约束
对于经时间-径向距离平面Hough变换后得到的可能航迹,由于未考虑方位角信息,使得可能航迹中含有较多的杂波点和虚假航迹,为对可能航迹进行进一步筛选,需要对Hough变换后可能航迹进行速度约束与航向约束。
2.2.1 速度约束
对于临近空间高超声速目标,认为其飞行速度在vmin与vmax之间,因此可利用目标两时刻的位置(xk,yk),(xk+1,yk+1),以及vmin,vmax建立环形波门对可能航迹进行约束。
(10)
2.2.2 航向约束
对于临近空间高超声速目标,由于其运动速度较快,不会出现突然悬停或反向强机动运动,即目标帧间航向的变化比较平稳,可以将连续三个扫描周期内真实目标的航迹近似为一条直线,因此可以通过目标机动角度的变化来消除虚假航迹,进行航向约束。
假设k时刻目标位置为(xk,yk),其后k+1与k+2两个时刻的目标位置分别为(xk+1,yk+1),(xk+2,yk+2),定义向量Rk,k+1=[xk+1-xk,yk+1-yk]T,Rk+1,k+2=[xk+2-xk+1,yk+2-yk+1]T,则将目标航向角定义为:
(11)
定义临近空间高超声速目标最大机动角为θ0,则航向约束条件为:
(12)
2.3 航迹合并
对于经速度约束与航向约束处理后得到可能航迹,可能会出现一个目标对应多条航迹的情况,这时需要对多条航迹进行判断,对于同一目标产生的航迹,需要对其进行合并。本文采用的航迹合并方法是将多条航迹对应的点集进行两两比较,求出两个点集中相同量测点的个数,设置门限η,如果两个点集中相同点的个数超过门限,则可以认定进行比较的两个点集是由同一目标产生,需要将这两个点集代表的航迹进行合并,对于两点集中相同时刻产生的不同量测点,算法取回波能量大的点作为该时刻目标回波点。
若雷达量测数据帧数为N,则定义门限η为:
(13)
式中:[·]表示取整运算。
通过将同一目标的多条航迹进行合并,可以实现多条航迹的数据互补,并对航迹内杂波点进行有效剔除,得到最终确认航迹。
3 仿真与分析
为验证算法的有效性,假设有2个临近空间高超声速目标,在x-y平面内运动,目标1作匀速直线运动,目标初始位置为(350km,350km),初始速度为(3000m/s,2000m/s),目标2作匀加速直线运动,目标初始位置为(360km,340km),初始速度为(3000m/s,2000m/s),初始加速度为(30m/s2,20m/s2);设定雷达位于坐标原点,扫描周期为1s,雷达距离量测误差为400m,角度量测误差为0.2°;积累量测数据为5帧,每帧数据的杂波数服从泊松分布,杂波密度为λ,产生的杂波按均匀分布随机地分布在雷达视域内。进行Hough变换对参数空间进行离散化处理时,将参数空间离散化为180×400个分辨单元。规格化系数μ=105,θmin=26°,速度约束条件vmin取Ma5,vmax取Ma20,航向约束条件θ0=100°,门限η=3。
3.1 杂波密度λ=80时的仿真实验
针对上述参数,对杂波密度λ=80,信噪比为6dB时的情况进行仿真验证,将5帧量测数据在数据空间进行叠加,得到如图1所示的杂波点与目标真实量测点分布图,其中图1(a)为x-y平面量测分布图,图1(b)为r-t平面量测分布图。
对扫描得到的雷达量测数据按2.1节步骤进行Hough变换,得到经参数空间点数积累矩阵和能量积累矩阵峰值检测后的可能航迹,如图2所示。
由图2可知,经时间-径向距离平面Hough变换后可以得到多条可能航迹,其中既包含目标真实航迹,同时也包含较多的杂波点以及由杂波点所形成的虚假航迹,为进一步剔除航迹内杂波点和虚假航迹,需要根据临近空间高超声速目标运动特性进行速度约束和航向约束,对图2中可能航迹进行进一步筛选,再经2.3节航迹合并后,得到算法最终输出航迹如图3所示。其中图3(a)为r-t平面算法输出效果图,图3(b)为变换到x-y平面后算法输出效果图。
由图3,通过将算法输出航迹与目标真实量测点对比可知,算法对目标1与目标2均能实现有效检测并获得目标回溯航迹,验证了算法的有效性。
传统的HT-TBD算法采用位置量测数据进行变换,对常规直线运动目标具有较好的检测效果,但无法对临近空间高超声速目标实现有效检测,本文在图1量测数据的基础上,利用文献[11]中算法对目标进行检测,仿真结果如图4所示。
3.2 不同信噪比条件下的仿真实验
为分析不同信噪比条件下算法的收敛情况,在保持其它条件不变的情况下,通过改变信噪比,得到不同信噪比条件下,通过1000次Monte-Carlo仿真后,算法对各个目标的检测概率以及总体检测概率(2个目标同时被检测到的概率)随信噪比的变化情况,如图5所示。
定义检测概率pd:
(14)
式中:Q是Monte-Carlo仿真试验次数,εqk代表第q次仿真中输出航迹是否包含目标k的航迹。
(15)
图5中横坐标为信噪比,纵坐标为检测概率,由图中可以看出2个目标各自的检测概率随SNR的变化情况以及总体检测概率随SNR的变化情况。通过对图中检测概率曲线进行分析可知,算法对目标的检测概率受SNR影响较大,且从检测概率变化趋势可以看出,随着信噪比的不断增大,算法对目标的检测概率呈上升趋势。在SNR为2dB时,算法对单个目标的检测概率能够达到0.6以上;当SNR增大到6dB左右时,算法对单个目标的检测概率可以保持在0.9以上。对于两个目标同时被检测到的总体检测概率,在SNR大于5dB时,目标总体检测概率也可以保持在0.8以上。由此可以看出本文算法在强杂波背景下对临近空间高超声速目标具有较好的检测能力。
3.3 不同杂波密度条件下的仿真实验
为进一步对本文算法有效性进行验证,下面通过改变杂波密度,进行仿真分析。在其它条件不变的情况下,对杂波密度λ进行不同取值,1000次Monte-Carlo仿真后,得到目标总体检测概率及平均输出虚假航迹数的变化情况,如表1所示。

表1 改变杂波密度仿真结果
通过对表1仿真结果分析可知,随着杂波密度λ的不断增大,算法对2目标的总体检测概率有所降低,但仍能对目标保持较高的检测概率,对目标进行有效检测;但同时,通过分析可以发现,随着杂波密度增大,算法输出的平均虚假航迹数目也随之增多,如何在杂波密度较大的条件下,有效减少虚假航迹数目,将是本文下一步进行研究的方向
3.4 算法性能对比
为对本文所提算法性能进行进一步分析,将本文所提算法与文献[14]提出的MHT-TBD算法进行比较。在本文所设仿真环境下进行Monte-Carlo仿真试验,得到两种算法对目标的检测结果如表2所示。
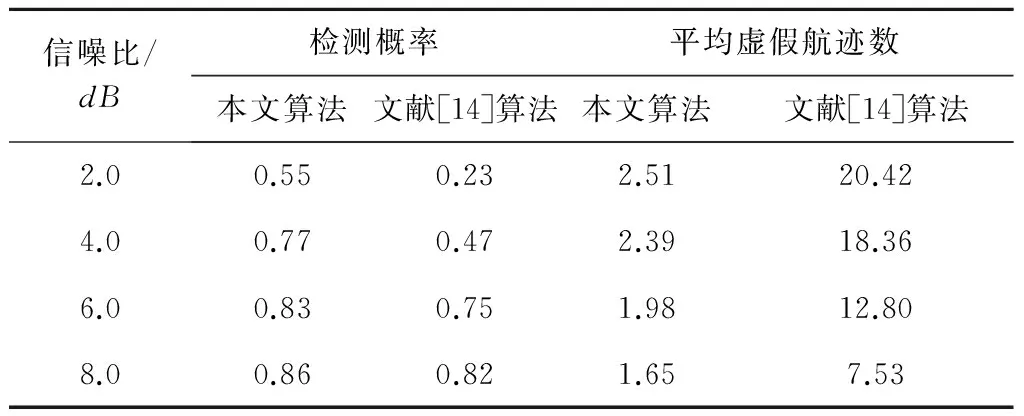
表2 两算法性能比较
针对表2仿真结果进行分析,对于算法检测概率,本文算法在信噪比较低时较文献[14]算法具有更好的检测概率;从算法输出的虚假航迹情况来看,文献[14]算法输出的虚假航迹较多,而本文算法能够消除临近空间高超声速目标存在的量测数据偏差大,落入相关波门内杂波多的影响,有效剔除虚假航迹和航迹内杂波点,实现对临近空间高超声速目标的有效检测。
4 结 论
本文研究了临近空间高超声速目标检测前跟踪问题,针对传统算法无法对临近空间高超声速目标进行有效检测的问题,提出了一种基于时间-径向距离平面进行Hough变换和多条件约束的检测前跟踪算法。通过在不同信噪比和杂波密度条件下进行仿真分析表明,算法能够对临近空间高超声速目标进行有效检测,并对目标航迹进行回溯,具有一定的工程实践意义。
[1] 黄伟, 罗世彬, 王振国. 临近空间高超声速飞行器关键技术及展望[J]. 宇航学报, 2010, 31(5): 1259-1265. [HuangWei,LuoShi-bin,WangZhen-guo.Keytechniquesandprospectofnear-spacehypersonicvehicle[J].JournalofAstronautics, 2010, 31(5): 1259-1265.]
[2]WangWQ.Near-spacevehicle-borneSARwithreflectorantennaforhigh-resolutionandwide-swathremotesensing[J].IEEETransactionsonGeoscienceandRemoteSensing, 2012, 50(2): 338-348.
[3]YangYN,WuJ,XieY,etal.Dynamicsmodelingandmaneuverabilityanalysisofanear-spaceearthobservationplatform[C].IEEEProc.ofthe5thInternationalConferenceonRecentAdvancesinSpaceTechnologies,Istanbul,Turkey,June9-11, 2011.
[4] 李志淮, 谭贤四, 王红等. 基于运动参数估计的高超声速目标检测方法研究[J]. 宇航学报, 2012, 33(3): 346-351. [LiZhi-huai,TanXian-si,WangHong,etal.Detectionalgorithmforhypersonictargetsbasedonmotionparameterestimation[J].JournalofAstronautics. 2012, 33(3): 346-351.]
[5] 张翔宇, 王国宏, 张静,等. 临近空间高超声速助推-滑翔式轨迹目标跟踪[J]. 宇航学报, 2015, 36(10): 1125-1132. [ZhangXiang-yu,WangGuo-hong,ZhangJing,etal.Trackingofhypersonicboost-to-glidetrajectorytargetinnear-space[J].JournalofAstronautics. 2015, 36(10): 1125-1132.]
[6]OrlandoD,RicciG,Bar-ShalomY.Track-before-detectalgorithmsfortargetswithkinematicconstraints[J].IEEETransactionsonAerospaceandElectronicSystems, 2011, 47(3): 1837-1849.
[7] 赵志超, 饶彬, 王雪松,等. 基于概率网格Hough变换的多雷达航迹起始算法[J]. 航空学报, 2010, 31(11): 2209-2215. [ZhaoZhi-chao,RaoBin,WangXue-song,etal.Multi-radartrackinitiationalgorithmbasedonprobabilisticgridHoughtransform[J].ActaAeronauticaetAstronauticaSinica, 2010, 31(11): 2209-2215.]
[8] 张鹏, 张林让. 基于动态规划的雷达弱目标检测前跟踪算法[J]. 西北大学学报(自然科学版), 2014, 44(6): 898-903. [ZhangPeng,ZhangLin-rang.Atrack-before-detectalgorithmbasedondynamicprogrammingforradardimtargetdetection[J].JournalofNorthwestUniversity(NaturalScienceEdition), 2014, 44(6): 898-903.]
[9] 吴孙勇, 廖桂生, 杨志伟,等. 基于改进粒子滤波的微弱目标检测前跟踪算法[J]. 系统工程与电子技术, 2010, 32(9): 1875-1879. [WuSun-yong,LiaoGui-sheng,YangZhi-wei,etal.Improvedtrack-before-detectalgorithmforweaktargetsbasedonparticlefilter[J].SystemsEngineeringandElectronics, 2010, 32(9): 1875-1879.]
[10]ChenJ,LeungH,LoT,etal.Amodifiedprobabilisticdataassociationfilterinrealclutterenvironment[J].IEEETransactionsonAerospaceandElectronicSystems, 1996, 32(1): 300-314.
[11]CarlsonBD,EvansED,WilsonSL.SearchradardetectionandtrackwiththeHoughtransformpartI:systemconcept[J].IEEETransactionsonAerospaceandElectronicSystems, 1994, 30(1): 102-108.
[12]CarlsonBD,EvansED,WilsonSL.SearchradardetectionandtrackwiththeHoughtransformpartII:detectionstatistics[J].IEEETransactionsonAerospaceandElectronicSystems, 1994, 30(1): 109-115.
[13]CarlsonBD,EvansED,WilsonSL.SearchradardetectionandtrackwiththeHoughtransformpartIII:detectionperformancewithbinaryintegration[J].IEEETransactionsonAerospaceandElectronicSystems, 1994, 30(1): 116-125.
[14]MoyerLR,SpakJ,LamannaP.Amulti-dimensionalHoughtransformbasedtrack-before-detecttechniquefordetectingweaktargetsinstrongclutterbackgrounds[J].IEEETransactionsonAerospaceandElectronicSystems, 2011, 47(4): 3062-3068.
[15] 郭云飞, 郑晓枫, 彭冬亮,等. 基于遍历Hough变换的弱目标检测前跟踪算法[J]. 系统仿真学报, 2015, 27(6): 1316-1323. [GuoYun-fei,ZhengXiao-feng,PengDong-liang,etal.Track-before-detectalgorithmforweaktargetbasedonErgodicHoughtransform[J].JournalofSystemSimulation, 2015, 27(6): 1316-1323.]
[16] 宋晨, 周军, 郭建国,等. 高超声速飞行器基于路径跟踪的制导方法[J]. 宇航学报, 2016, 37(4): 435-441. [SongChen,ZhouJun,GuoJian-guo,etal.Hypersonicvehicleguidancebasedonpath-following[J].JournalofAstronautics. 2016, 37(4): 435-441.]
[17] 孔敏. 天波超视距雷达目标跟踪技术研究[D]. 烟台: 海军航空工程学院, 2007. [KongMin.Researchontargettrackingtechnologyforover-the-horizonradar[D].Yantai:NavalAeronauticalandAstronauticalUniversity, 2007.]
[18] 王国宏, 孔敏, 何友.Hough变换及其在信息处理中的应用[M]. 北京:兵器工业出版社, 2005. [WangGuo-hong,KongMin,HeYou.Houghtransformwithapplicationsininformationprocessing[M].Beijing:EngineryIndustryPress, 2005.]
通信地址:山东省烟台市二马路188号海军航空工程学院信息融合研究所(264001)
电话:15563885205
E-mail:fengzhite@126.com
(编辑:张宇平)
A TBD Algorithm for Near Space Hypersonic Target
LI Lin, WANG Guo-hong, YU Hong-bo, TAN Shun-cheng
(Institute of Information Fusion, Naval Aeronautical and Astronautical University, Yantai 264001, China)
Aiming at the problem that the traditional algorithm cannot detect the near space hypersonic target effectively, a kind of track-before-detect(TBD) algorithm based on Hough transform and multi-constraint conditions is proposed. Firstly, to get the potential target tracks, the time-radial distance measurement data is used for Hough transform, and the parameter space variableθismadeastheaccumulationconstraintconditiontoavoidinvalidaccumulation.Then,allpotentialtracksaredealtwithvelocityconstraintandangleconstrainttofurthereliminatefalsetracksandclutterpointsinsidethetrack.Finally,aftermergingthesametargettracks,thefinalconfirmationtracksareobtained.Thevalidityofthealgorithmisverifiedbysimulation,andthealgorithmperformanceunderdifferentSNRandclutterdensityisanalyzed.Thesimulationresultsshowthatthenearspacehypersonictargetundertheclutterbackgroundcanbeeffectivelydetectedaccordingtothealgorithminthispaper.
Hough transform; Multi-constraint conditions; Near space; Hypersonic target; Track-before-detect (TBD)
2016-03-24;
2016-08-09
国家自然科学基金(61372027,61501489,61671462)
TN
A
1000-1328(2017)04-0420-08
10.3873/j.issn.1000-1328.2017.04.012
李 林(1991-),男,博士生,主要从事雷达数据处理、微弱目标检测。
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
军民两用技术与产品(2022年2期)2022-06-01
凤凰动漫(军事大王)(2022年1期)2022-04-19
雷达与对抗(2020年2期)2020-12-25
舰船电子对抗(2020年5期)2020-11-26
火控雷达技术(2020年2期)2020-10-16
雷达科学与技术(2020年4期)2020-09-11
雷达与对抗(2020年1期)2020-06-05