抗磁悬浮石墨转子理论分析与实验
2017-05-17 13:32:36苏宇锋叶志通
中国机械工程 2017年9期
苏宇锋 叶志通 张 坤
郑州大学机械工程学院,郑州,450001
抗磁悬浮石墨转子理论分析与实验
苏宇锋 叶志通 张 坤
郑州大学机械工程学院,郑州,450001
提出了一种由钕铁硼永磁体和高定向热解石墨转子组成的抗磁悬浮结构。石墨转子采用四个叶片结构,其重力与永磁体对它的抗磁力相等,从而实现转子稳定地悬浮在永磁体上方,并在外界驱动转矩的作用下发生转动。有限元软件中仿真得到石墨转子的悬浮高度为130 μm,与实验测量值吻合较好,仿真误差为1.5%。实验中利用针孔喷嘴向转子叶片处施加切向气流作为驱动转矩,对转子的旋转速度与气流流速的相对关系进行了测试分析,发现转子最大转速可达500 r/min。该抗磁悬浮结构有望用于非接触式的微型传感器和微型电机中。
石墨转子;抗磁悬浮结构;外界驱动转矩;转速测量
0 引言
随着磁悬浮技术研究的不断深入,磁悬浮装置的应用范围也越来越广泛[1-2]。钕铁硼(NdFeB)永磁体具有较高的磁能积和矫顽力,在永磁悬浮领域中被广泛采用。但是根据Earnshaw定理,永磁体之间虽然可以产生引力和斥力,但不能单独实现稳定的永磁悬浮[3]。研究表明,抗磁体在磁场中受到排斥力,常温下可以得到稳定的悬浮[4]。由于这种抗磁悬浮不需要其他辅助设备,也不需要任何能量输入,故被称为“真正的悬浮”[5]。ABADIE等[6]利用NdFeB永磁体和热解石墨板制成纳米力传感器,在线性范围内通过测量悬浮磁体的位移来测量微小力,分辨率可以达到5 nN。HILBER等[7]利用NdFeB永磁体、抗磁性的热解石墨板和线圈组成一个小型抗磁悬浮驱动器,其中,悬浮磁体集成在一个高分子复合材料薄膜上,该驱动器的一个应用前景是用来驱动微流控芯片。抗磁悬浮系统简单可靠,体积、质量小,还可广泛应用于能量采集器[8]、密度传感器[9]、微陀螺仪[10]等领域。本文研究了一种由永磁体和石墨转子组成的新型抗磁悬浮结构,并对该结构进行了理论分析和实验验证。
1 结构模型和原理
本文研究的抗磁悬浮结构模型如图1所示,它主要由石墨转子、永磁体和底板组成[11],其中,石墨转子材料选用目前抗磁性最强的热解石墨,由四个齿形叶片组成;永磁体材料选用目前磁性最强的钕铁硼永磁体,它由圆柱和圆环结构组成,磁化方向沿轴向,但充磁方向相反;底板材料选用铁或者镍,可以吸附在永磁体上面。当石墨转子的重力等于下方永磁体对它的抗磁力时,石墨转子可以稳定地悬浮在永磁体的正上方。此时,对石墨转子施加一个切向力,石墨转子会在永磁体上方旋转起来。
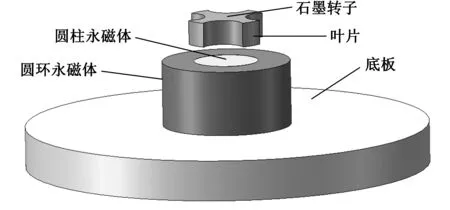
图1 抗磁悬浮石墨转子结构模型Fig.1 Schematic diagram of HOPG rotor based on diamagnetic levitation
2 抗磁力和转矩分析
在永磁体磁场作用下,石墨转子单位体积所受的作用力[12]
dF=Mm·(·B)dV
(1)
其中,Mm、B分别为永磁体磁场在石墨转子处的磁化强度、磁感应强度;·B是磁感应强度B的散度;V为石墨转子体积。由于热解石墨为各向异性材料,且其磁导率χm非常小,故Mm可表示为
(2)其中,μ0表示真空磁导率;χmx、χmy、χmz分别表示热解石墨磁导率χm沿x、y、z轴的分量;Bx、By、Bz分别表示磁感应强度B沿x、y、z轴的分量。
将式(2)代入式(1),并对石墨转子整体进行积分,可得石墨转子与永磁体之间的作用力。抗磁力沿x、y、z轴的分量Fx、Fy、Fz分别为
(3)
根据高斯散度定律,对石墨转子体积进一步积分,则式(3)可写成
(4)
其中,nx、ny、nz分别为石墨转子表面积法向量沿x、y、z轴的分量,ds为石墨转子表面积的单位元。求出永磁体磁场B(x,y,z)在空间中的分布后,石墨转子与永磁体之间的相互作用力可以通过式(4)求出。
设竖直方向为z轴,当石墨转子在竖直方向实现受力平衡时,有
Fz=G
(5)
其中,G为石墨转子的重力。此时转子与永磁体之间的距离即石墨转子的悬浮高度。利用外部气流作用于叶片来给石墨转子施加一个切向力,石墨转子在外界驱动力的作用下发生转动。
设喷嘴与石墨转子在同一水平面上,由于喷嘴比较细,取气流与圆弧形转子叶片的微小接触处为控制体[13],如图2所示,将气流对石墨转子的作用简化为射流作用在一斜置平壁面后分为两股的流体力学模型。设射流的流量为Qi,密度为ρ,速度为vi,射流方向与壁面的夹角为θ,分为两股流出控制体时的速度分别为v1、v2,在射流与平壁的接触面上,平壁对射流所施加的力F与壁面垂直,沿图2中y轴方向。对控制体内的流体质量系统沿x、y轴分别列出动量方程:
ρv1Q1-ρv2Q2-ρviQicosθ=0
(6)
F=ρviQisinθ
(7)
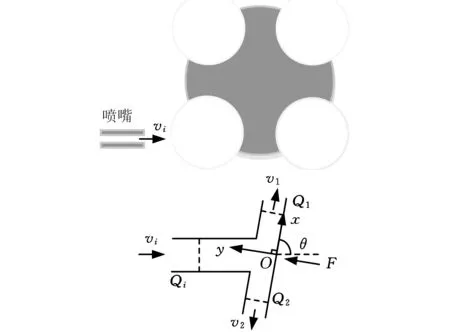
图2 气流与转子相互作用时的流体力学模型Fig.2 A fluid mechanics model of interaction between gas flow and rotor
根据牛顿第三定律,气流对石墨转子的驱动力大小为F,方向沿y轴负方向。设气流与石墨转子接触处距离转子中心的半径为r,则气流对转子的驱动力矩
M=-Fr
(8)
当气流速度较小时,驱动力较小,不足以克服转子的静平衡转矩,石墨转子处于静止状态;当气流速度增大到一定程度后,石墨转子在气流的作用下开始做旋转运动,设石墨转子的转动惯量为I,角加速度为α,则有
M=Iα
(9)
当石墨转子以恒定角速度ω旋转时,有
α=dω/dt
(10)
其中, t为气流作用时间。联立式(8)~式(10)得
(11)
石墨转子绕中心轴旋转时的动能
E=Iω2/2
(12)
设气流流入控制体之前动能为Ei,流出控制体时动能为Eo,气流作用在石墨转子上时的动能损失为ΔE,则根据能量守恒定律,有
Ei=E+Eo+ΔE
(13)
3 悬浮高度计算
当永磁体对石墨转子的抗磁力等于转子重力时,转子在竖直方向受力平衡;由于永磁体由圆环和圆柱结构组成,磁场沿水平方向对称分布,在石墨转子处形成一个磁势能阱,从而限制了转子水平方向的自由度,并为转子提供一定的偏心回复力,如图3所示。在外界扰动影响下,当石墨转子沿竖直方向向下偏离平衡位置时,转子与永磁体间的抗磁力增大,转子重力不变,合力将使转子向上回到平衡位置;反之,转子向上运动时,抗磁力随间距的增大而减小,产生向下的合力,实现转子的自动回复。
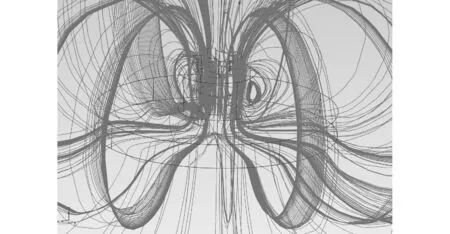
(a)石墨转子磁感线分布
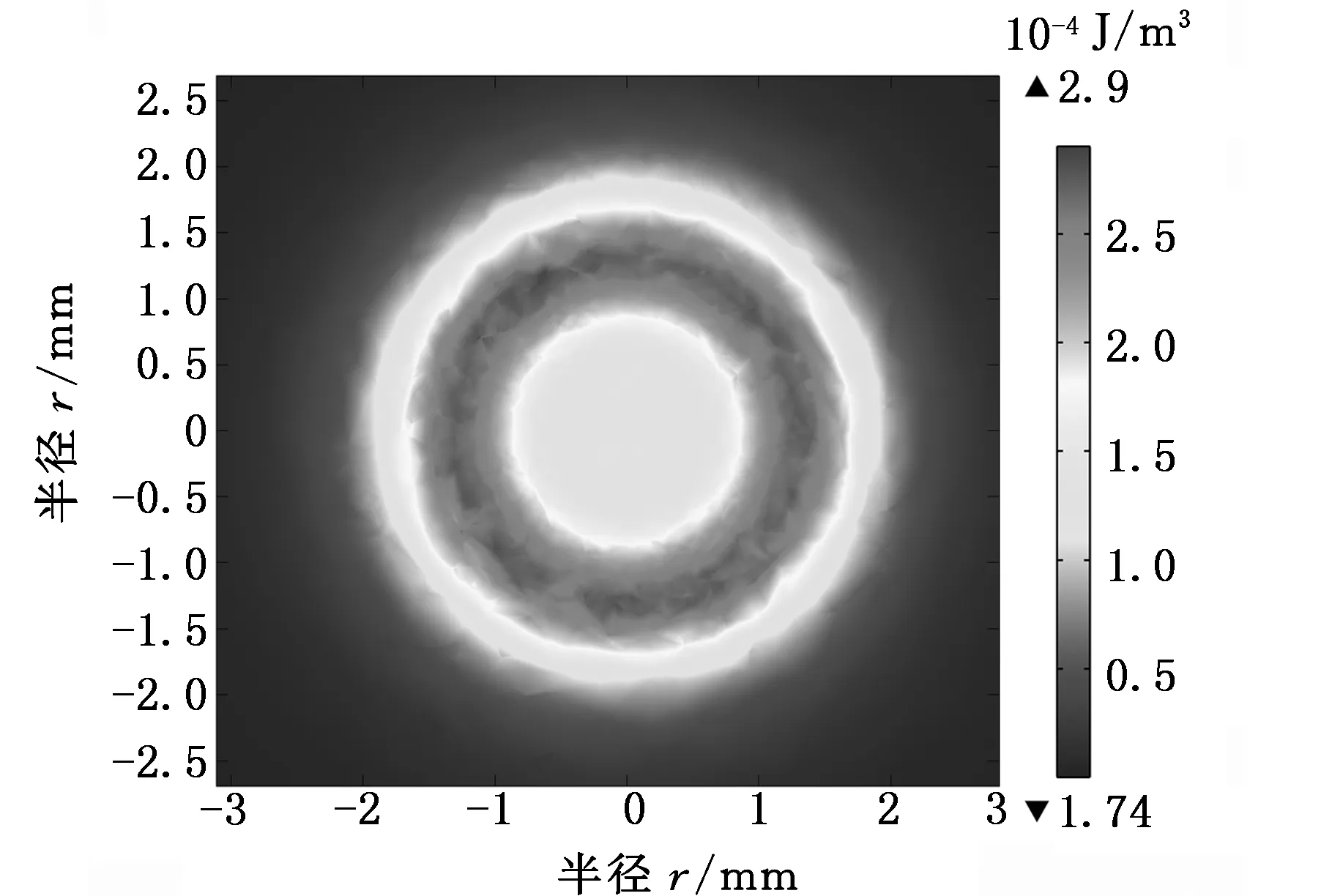
(b)磁势能阱图图3 石墨转子磁感线分布图和磁势能阱图Fig.3 Distribution of magnetic induction lines of graphite rotor and Magnetic potential energy trap
在有限元软件中对石墨转子与永磁体之间的抗磁力进行仿真计算,可以得到抗磁力随两者间距的变化曲线,如图4所示。令抗磁力等于石墨转子的重力,从图4中可以读出此时石墨转子的悬浮高度为130μm,与实验测量值132μm吻合较好,仿真结果较好地反映了实际情况。
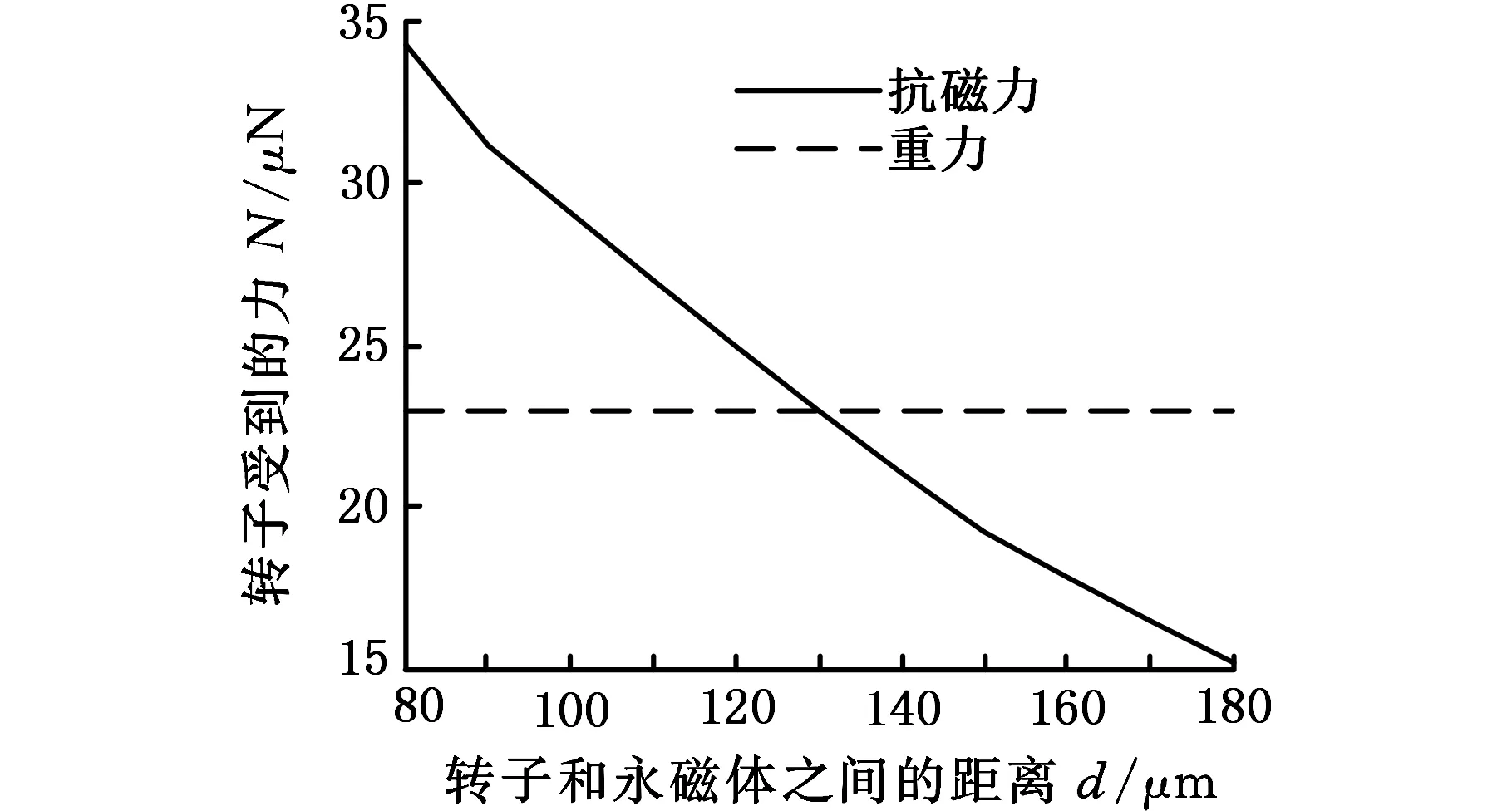
图4 石墨转子与永磁体间抗磁力随两者间距变化示意图Fig.4 Diamagnetic force exerted on the HOPG rotor at a different height
4 实验测试和分析
如图5所示,抗磁悬浮结构中,石墨转子采用微电火花技术加工而成,外直径为2mm,齿形叶片中圆弧的直径为1mm,厚度为600μm;永磁体选用N42型钕铁硼永磁体,圆环永磁体的外直径为3.175mm,内直径为1.588mm,厚度为1.588mm;内部圆柱永磁体直径为1.588mm,厚度为1.588mm。抗磁悬浮石墨转子的实验测试装置主要由针孔喷嘴、流量计、激光位移传感器和传感器读取装置组成,如图5a所示。
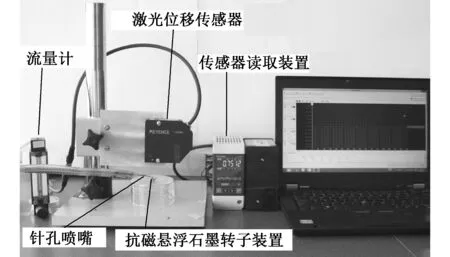
(a)石墨转子实验测试装置图

(b)针孔喷嘴与石墨 (c)激光位移传感器测 转子作用示意图 石墨转子转速原理图图5 抗磁性磁悬浮结构的流量驱动实验Fig.5 Gas driving experiment for the diamagnetic levitation structure
针孔喷嘴直径为600μm,与氮气源相连,沿切向方向将气流喷向石墨转子的叶片处,为石墨转子提供旋转转矩,氮气流的速度可以通过流量计来进行测量和控制。石墨转子的悬浮高度和转速可以通过激光位移传感器测量得到,如图5c所示,激光光线照射在两个叶片之间,石墨转子转动一周,光线被隔断四次,产生四个脉冲,通过测量脉冲次数可以得到石墨转子的转速。实验过程中,当气体流量低于21.45cm3/min时,转子在永磁体上面只是摆动,并未发生转动。继续增大气流速度,转子转速基本稳定在120~130r/min,此时的氮气流若采用脉冲形式,石墨转子在脉冲气流的作用下每次旋转90°。在此基础上继续增大连续气流速度,转子将恢复连续转动,且转动速度近似线性增大,此时若慢慢减小气流速度到最小值16.61cm3/min时,转子仍然维持原来的连续转动,只是转动速度有所下降,说明转子转动前的静摩擦转矩大于转动时的动摩擦转矩。当气流速度超过临界值时,驱动力矩过大,石墨转子将脱离永磁体的正上方,悬浮状态被打破,石墨转子无法正常工作。石墨转子的转速与氮气流速度的关系如图6所示。

图6 石墨转子转速随气流速度变化示意图Fig.6 Trend of the rotation speed of HOPG rotor versus flow velocity
5 结论
本文提出了一种抗磁悬浮结构,自上而下由石墨转子、圆环圆柱结构永磁体和圆盘铁板或镍板组成。石墨转子在重力和永磁体抗磁力的作用下实现受力平衡和稳定悬浮,并在外界驱动转矩的作用下发生转动。石墨转子悬浮高度的仿真值为130μm,实验测定值为132μm,仿真结果较好地反映了实际情况。建立了石墨转子在外界切向气流作用下的流体力学模型,得到了转子转速与气流流速之间的理论公式。实验结果表明,石墨转子在转动之前存在一定的静摩擦转矩,且静摩擦转矩比动摩擦转矩大。当气流速度从21.45cm3/min增大到28.16cm3/min时,石墨转子的转速近似线性增大,最大转速可达500r/min。该抗磁悬浮装置可用于微型传感器、微型电机和微型轴承中,能从消除摩擦的角度来改善这些产品的性能。
[1] 张维煜, 朱熀秋, 袁野. 磁悬浮轴承应用发展及关键技术综述[J].电工技术学报, 2015,30(12):12-20.ZHANGWeiyi,ZHUHuangqiu,YUANYe.StudyonKeyTechnologiesandApplicationsofMagneticBearings[J].TransactionsofChinaElectrotechnicalSociety,2015,30(12):12-20.
[2] 金俊杰, 段振云, 孙凤, 等. 永磁悬浮无尘传送系统的悬浮特性及解耦控制仿真分析[J].中国机械工程, 2016,27(4):518-525.JINJunjie,DUANZhenyun,SUNFeng,etal.SimulationAnalysisonSuspensionCharacteristicsandDecouplingControlforDust-freeTransitSystemUsingPermanentMagneticSuspension[J].ChinaMechanicalEngineering,2016,27(4):518-525.
[3]EARNSHAWS.OntheNatureoftheMolecularForcesWhichRegulatetheConstitutionoftheLuminiferousEther[J].TransactionsoftheCambridgePhilosophicalSociety,1848,97(7):97-112.
[4]SIMONMD,HEFLINGERLO,GEIMAK.DiamagneticallyStabilizedMagnetLevitation[J].AmericanJournalofPhysics,2001,69(6):702-713.
[5] 王桂香, 范瑜, 柯青峰, 等. 抗磁性磁悬浮装置初探[J].电工技术学报,2006,21(3):67-70.WANGGuixiang,FANYu,KEQingfeng,etal.StudyoftheDeviceofDiamagneticLevitaion[J].TransactionsofChinaElectrotechnicalSociety,2006,21(3):67-70.
[6]ABADIEJ,PIATE,OSTERS,etal.ModelingandExperimentationofaPassiveLowFrequencyNanoforceSensorBasedonDiamagneticLevitation[J].Sensors&ActuatorsAPhysical,2012,173(1):227-237.
[7]HILBERW,JAKOBYB.AMagneticMembraneActuatorinCompositeTechnologyUtilizingDiamagneticLevitation[J].IEEESensorsJournal,2013,13(7):2786-2791.
[8]YEZ,DUANZ,TAKAHATAK,etal.MotionCharacteristicsandOutputVoltageAnalysisofMicro-vibrationEnergyHarvesterBasedonDiamagneticLevitation[J].AppliedPhysicsA,2015,118(1):91-100.
[9]CLARAS,ANTLINGERH,HILBERW,etal.AViscosityandDensitySensorBasedonDiamagneticallyStabilizedLevitation[J].IEEESensorsJournal,2015,15(3):1937-1944.
[10] LIU K, ZHANG W, LIU W, et al. An Innovative Micro-diamagnetic Levitation System with Coils Applied in Micro-gyroscope[J]. Microsystem Technologies,2010,16(3):431-439.[11] SU Y, XIAO Z, YE Z, et al. Micromachined Graphite Rotor Based on Diamagnetic Levitation[J]. IEEE Electron Device Letters,2015,36(4):393-395.
[12] YE Z, DUAN Z, SU Y. Theoretic and Numerical Analysis of Diamagnetic Levitation and Its Experimental Verification[C]//The International Conference on Photonics and Optical Engineering (icPOE 2014).Xi’an,2014:944907.
[13] 赵汉中. 工程流体力学[M]. 武汉: 华中科技大学出版社, 2011: 64-66. ZHAO Hanzhong. Engineering Fluid Mechanics[M]. Wuhan: Huazhong University of Science and Technology Press, 2011: 64-66.
(编辑 陈 勇)
Theoretical Analyses and Experiments of Micromachined Graphite Rotor Based on Diamagnetic Levitation
SU Yufeng YE Zhitong ZHANG Kun
School of Mechanical Engineering, Zhengzhou University, Zhengzhou,450001
A diamagnetic levitation structure consisted of NdFeB permanent magnets and a highly oriented pyrolytic graphite rotor was studied herein. The rotor was designed as a disc with four identical blades. The gravity of the rotor was equal to the diamagnetic force from the permanent magnets, leading to the stable levitation and consistent rotation of the rotor under external driving torques. The levitation height of the rotor was simulated to be 130 μm in the finite element analysis software, which matched well with the experimental results, and the simulation errors are as 1.5%. In order to introduce a driving torque, needle nozzle was adopted to produce tangential airflow to the blade of the rotor. The relationship between the rotor rotation speed and the flow rate of the airflow was investigated and analyzed, and the maximum speed of the rotor could reach 500 r/min. The diamagnetic structures possess potentials in the applications of non-contact microsensors and micromotors.
graphite rotor; diamagnetic levitation structure; external driving torque; rotation speed measurement
2016-06-15
国家自然科学基金资助项目(51475436);河南省重点科技攻关项目(152102210042)
TH16;TH703
10.3969/j.issn.1004-132X.2017.09.006
苏宇锋,男,1977年生。郑州大学机械工程学院教授、博士。主要研究方向为MEMS器件设计与分析、机电系统控制。E-mail: yufengsu77@yahoo.com。叶志通,男,1990 年生。郑州大学机械工程学院硕士研究生。张 坤,男,1989 年生。郑州大学机械工程学院博士研究生。
猜你喜欢
小猕猴智力画刊(2023年4期)2023-04-23 08:50:18
作文小学中年级(2023年1期)2023-02-12 06:52:22
小学科学(2022年23期)2023-01-30 08:16:12
小猕猴智力画刊(2022年4期)2022-05-23 13:48:30
格言·校园版(2021年22期)2021-09-27 05:39:56
小学科学(学生版)(2021年4期)2021-07-23 01:24:18
微特电机(2021年1期)2021-01-25 03:23:14
仪表技术与传感器(2020年5期)2020-06-11 07:01:10
大电机技术(2018年4期)2018-09-26 03:11:30
中学生数理化·八年级物理人教版(2017年6期)2017-11-09 06:00:31