
港口集装箱起重机吊具自动定位技术改进
2017-05-16 07:28李坤莲吴琤余满蔡宇航邱泽伟
科学与财富 2017年12期
李坤莲+吴琤+余满+蔡宇航+邱泽伟

摘 要:本文拟将图像识别技术引入集装箱码头的装卸过程,通过基于图像识别技术的集装箱识别与定位实现集装箱的自动抓取,快速定位到集装箱的位置,这对于提高集装箱装卸效率,实现装卸自动化,降低操作人员的操作难度,降低吊具锁孔时间,进而提高集装箱装卸效率,具有非常重要的意义。
关键词:集装箱港口;自动定位;起重机吊具
我国的海上丝绸之路计划使得我国的海运的到了极大的发展,而海运本身也是需要很多技术支持的,除了在海上运输的过程中需要极高的航海技术,在船只到达码头后的对船上货物进行装卸也是同样需要技术支持。
近年来,社会经济发展对件杂货码头装卸工艺提出新要求。港口件杂货装卸生产囊括了船舶、货物、设备、场地等多种因素,各因素相互交叉影响。目前件杂货物集装箱化的比例不断提高,而港口件杂货装卸生产却普遍存在自动化水平较低、生产成本高、装卸效率无法满足需求的问题。对于我国社会经济发展前进重要一部分的件杂货码头而言,传统的手动控制抓取集装箱已经极大的影响了生产效率和装卸速度,基于此本文对将图像识别技术引入集装箱抓取自动化,及其优化进行研究与探讨。
1. 港口集装箱起重机吊具的控制方法
随着自动化运输系统的开发及应用,集装箱港口运输环节效率得到极大提升,于是便要求集装箱装卸效率与之相匹配。可是装卸操作作业仍依赖于人工操作。
1.1集装箱装卸工艺及其特点
集裝箱运输需要高效配合,适用于大规模生产。作为海陆联运的枢纽,集装箱港口是海上运输和陆上运输的连接点。目前,集装箱码头上所采用的装卸工艺基本有三种,分别是:底盘车方式、跨运车方式、龙门吊方式(亦称场桥方式)。为了装卸的便利,海陆联运的集装箱都采用国际标准集装箱,所以装卸机械要符合国际集装箱的作业规范,要使用集装箱专用机械。
1.2传统的集装箱起重机装卸
港口起重机采用集装箱吊具来装卸集装箱,是集装箱码头作业的主要机械设备。现阶段,集装箱的提升、放置仍需要专业人员在操控室中进行人工操作。
操作室里的控制人员通过操纵设备移动吊具,当移动至集装箱正上方时再放下吊具;在吊具降至箱面时,在确认箱顶面锁孔对准无误后,插入并旋转锁头固定集装箱,即完成吊具锁孔工作。然而,大型港口起重机控制室普遍高达几十米,操作人员主要靠肉眼判断锁孔与锁头的相对位置,如有障碍物遮蔽,并且集装箱的锁孔很小,四个锁头同时固定难度极大,控制人员在操作时难以完成吊具锁孔固定工作,从而导致装卸时间延长,装卸效率降低。即使控制人员对低处的吊运机和叉车进行操控,也难以实现锁头的准确锁孔。
1.3起重机吊具自动化发展现状
经济全球化的发展也带动了集装箱航运业的飞速发展,集装箱船舶的大型化,对装卸的高速化提出新要求。现在已有一些国内外自动化集装箱码头实践的范例。日本名古屋TCB码头水平运输为AGV,堆场设备选择ARTG,并在前沿码头设置岸边集装箱起重机,此外,为实现集装箱箱号和卡车号的自动采集,该码头使用了无线射频识别(FRID)技术及光学字符识别(OCR)技术;德国汉堡港CTA码头的水平运输选用AGV,应用计算机模拟技术对码头进行路径规划设计和设备调度;意大利FATA码头选取起重机-高架桥-立体仓 的模式,使小车运行时的定位更为精确,也减少了装卸次数以及对岸线的占用,上海外高桥集装箱自动化码头采用高效环保型集装箱码头全自动化装卸系统,借助现代港口集装箱物流智能化、数字化管理平台,港口集装箱综合作业效率提高5%一8%,堆场能力比国际上几乎高出一倍。新型岸边集装箱起重机能够提高吊具与船上集装箱对位的准确性,同时采用双梁结构,运用载重小车担负集装箱在水平方向的运输,装卸效率显著提高。
图像识别技术作为人工智能的一个重要部分,随着它的发展,其应用范围也越来越广。光学字符识别(OCR)技术及自动导引车系统(AGV)技术等都涉及到图像识别技术,势必会给港口起重机吊具自动化发展带来新的机会。
2.利用图像技术对集装箱起重机吊具精确定位技术的研究
2.1国内外研究现状
当今的集装箱港口应用了如:RFID技术、GPS技术、自动导引车系统技术AGVS(automated guided vehicle system)、信息管理系统技术、决策支持系统技术、自动场吊ASC技术等新技术。这些新技术的引进,降低了人力资源投入以及港口操作的失误率,实现了港口资源的实时调度,从而提高了整个港口工作效率,增强了港口的竞争力。
集装箱运输的迅速发展是为了能够提高集装箱的自动化信息管理,正因如此大量学者以集装箱为研究对象,采用图像处理方法,进行了许多深入的研究。
(1)以集装箱为对象的图像成像原理的研究
清华大学核能技术研究院的吴志芳等人利用辐射成像原理实现集装箱的检测。张广军主要利用MATLAB进行仿真,对集装箱的破损部位(孔洞)进行了数字图像处理方面的研究。常捷等人研究的是基于图像的集装箱箱号识别,为码头、堆场、海关管理迈向自动化解决了最基本最关键的问题。李如松,何彬,杨杰研究了基于集装箱γ射线检测的图像处理[1]。
(2)集装箱识别与定位的研究
张森、傅圣雪提出了MATLAB平台下的集装箱识别定位的新方法,并结合实际情况采取边步长平移搜索方案,进一步提高了系统速度,满足系统实时性的要求。陈丹研究了关于图像识别系统的集装箱精确定位的图形处理。谢丁龙研究编写上位机与运动控制器的通讯协议,完成了根据实际的集装箱装卸环境设计构造的模拟集装箱装卸系统。武玉升利用单片机基于以太网通讯实现吊桥集装箱装卸的远程定位,司机通过驾驶室内的显示器和语音提示系统,就能实时掌握集装箱的位置。肖洋研究了吊具、集装箱、卡车所构成的装卸系统的集装箱定位[1]。
国外的学者Hee-Joo Yoon,Young_Chul Hwang and Eui-Young Cha提出了基于双目立体视觉系统的集装箱装卸自动化集装箱实时监测与定位,为集装箱自动化装卸提供了更深入的研究。
(3)集装箱自动定位的研究成果转化
三菱重工业株式会社发明了“装卸用起重机中的集装箱位置检测方法及装置、集装箱着地、探放控制方法”专利(专利号:EP1333003A1)。在吊具上安装摄像设备对目标集装箱进行图像采集,该方法通过所采集的图像数据,可以精确的对目标集装箱与吊具的相对位置进行检测。最终,由magic eye(该专利采用的计算机视觉部分)引导吊具定位集装箱。
德国西门子公司SIEMENS AG(DE)的专利(专利号:DE10107048)涉及了一种集装箱起重机装卸方法,也适用于集装箱船舶运输装卸作业。在起重机驾驶室中采用带有监视器的PC机,用过触摸屏操作,根据预先设定的值能使起重机自动定位预期目标[1]。
2.2图像识别技术的基本流程与原理
在实验室模拟试验后,结合画面获取时间、集装箱识别率、计算机计算速度、和装配维护成本多方面因素,最终拟采用双目视觉伺服系统,系统模式为手眼系统(eye-in-hand),是基于图像的视觉伺服系统。
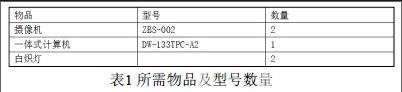
所需摄像机数量为2个,型号为ZBS-002,放置于岸桥吊具对角抓脚处;工业一体式计算机1台。为满足夜间作业,需要在摄像机安装处各加装白炽灯1盏。(如表1)
(1)图像处理的基本流程图(图1)
(2)工作原理
1.驾驶员手动操作岸桥,使抓具移动到集装箱上空。按下“抓取”按钮。
2.摄像头获取图像,以矩形的特征抓取目标。
3.锁定目标后,分别以A、B摄像头作为横、纵轴的基准点,大致判断抓具与集装箱的方位。
4.计算机运作,通过提前输入的算法,计算出抓具所需移动的方向、距离。具体实现方法见下。
5.抓具匀速下降,与此同时计算机持续运算,不断微调抓具位置,直至最后对准集装箱。
6.抓具准确抓取集装箱,驾驶员按下“确认“按钮后,转为手动操作。
7.若出现抓具未能准确抓取的情况,系统提示驾驶员选择“再次对准”或“手动抓取”。
2.3机器人的控制系统系统设计
机器人采用集中式控制,在操控室安放一台微型计算机。在Windows10操作平台下运行Open Source Computer Vision Library(简称opencv),进行图像识别和计算,再将处理后的数据传输至抓具控制系统,抓具控制系统自动操作抓具抓取集装箱,具体包括:①采用摄像头对集装箱进行图像釆样;②对采集的集装箱图像进行预处理;③进行图像分割,提取待识别物体集装箱;④进行集装箱特征识别,特别是集装箱的顶点特征,为集装箱定位提供基础;⑤进行集装箱定位研究。
具体实现方法:
假设作业人员左侧摄像机为A摄像机,右侧摄像机为B摄像机。
1.A摄像机获取集装箱左侧图片信息后,计算出左抓脚与集装箱的横向(x轴)的距离。B摄像机获取集装箱右侧图片信息后,计算出右抓脚纵向(y轴)的距离。
2.通过相位差算法,抓具每次位移的距离为:抓脚与集装箱相应抓取点差距的一半,位移结束后重复计算位移,直至差距小于3cm。
3.下放抓具,准确抓起集装箱,再由作业人员移动载具。
选用相位差算法的原因如下:
①可以快速确定移动范围。
②能有效减轻抓具因惯性的摇摆,对计算结果的影响。
③所需设备数量少,成本低。
3.结束语
集装箱码头和装卸实际情况复杂、随机性大。关于港口集装箱起重机吊具自动定位技术难题实际上还有很多,但是在这里就不赘述了,如果想实现港口集装箱起重机吊具自动定位技术的真正智能,还是需要高度发达的人工智能机器人的支持。目前这种人工智能还停留在概念阶段,所以要把集装箱起重机吊具自动定位技术进一步智能化,高效化,还有一段很长的路要走。
参考文献
[1] 陈丹.集装箱图像识别与定位系统研究与实现[硕士学位论文].西南交通大学.软件工程.2013.
[2] 王雪.基于机器视觉的港口集装箱卸船定位识别系统[A].中国水运.2015(11).
[3] 谢丁龙.基于计算机视觉的集装箱定位系统的研究[硕士学位论文].天津:天津科技大学.检测技术与自动化装置.2006.
[4] 杨宇华.集装箱自动化码头发展趋势报告[A].中国工程机械学報.2015(06).
[5] 沈元浩.伸缩式集装箱吊具的现状与发展.武汉交通科技大学.
[6] 杨建勇.现代港口发展的理论与实践研究[博士学位论文].上海海事大学.交通运输规划与管理.2005 .
[7] 张广军.数字图像处理在集装箱检测中的应用研究[硕士学位论文].哈尔滨工业大学.控制科学与工程.2008.
[8] 吴喆.有关件杂货码头装卸作业优化分析.珠江水运.2016(02).
[9] 李利慧.智能化抓斗卸船机若干关键技术分析.科技创新与应用.2016(27).
