
机载导航系统的建模与仿真
2017-05-10 07:37侯立志
装甲兵工程学院学报 2017年2期
侯立志, 何 晶
(1. 空军工程大学信息与导航学院, 陕西 西安 710077; 2. 94498 部队, 河南 南阳 474370)
机载导航系统的建模与仿真
侯立志1,2, 何 晶1
(1. 空军工程大学信息与导航学院, 陕西 西安 710077; 2. 94498 部队, 河南 南阳 474370)
针对在实验室环境下实时获取机载导航数据难度大的问题,在已知飞行航迹文件的基础上,利用模块化设计思想,在Visual Studio 2010环境下设计了机载导航仿真系统,模拟输出了逼真的机载导航数据,为机载飞行控制等系统的方案论证、系统设计及验证评估提供了可靠的数据来源,也为导航计算机算法的研究提供了验证平台。
机载导航系统; 飞行航迹; 建模; 仿真
机载导航系统能够为飞行人员提供载机实时的姿态、速度和位置等信息,是引导载机安全飞行、完成预定作战任务的重要电子设备,也是影响载机技术和战术性能的重要因素之一,其输出信息对机载火力控制系统、雷达以及飞行控制系统都有一定的影响。在实验室环境下,实时获取机载导航数据难度大、成本高。利用计算机仿真技术开发机载导航仿真系统,不仅可以在实验室环境下获取全套导航数据,还可以设置设备的参数,成本低、通用性强。目前,机载导航仿真系统研究大多集中在捷联惯导的建模与仿真,以及惯性导航(简称“惯导”)和卫星导航(简称“卫导”)各种组合方式的建模与仿真[1-5],较少涉及塔康系统及大气机数据系统,且基于误差的数值仿真较多,以可视化方式展现仿真结果的较少。为此,笔者设计了由捷联惯导系统、卫导系统、大气机数据系统和塔康系统构成的机载组合导航仿真系统,并在Visual Studio 2010[6]环境下进行系统仿真,实时仿真导航系统的输出,以可视化方式动态展现载机飞行姿态的变化情况。
1 机载导航系统概述
常见的机载导航系统主要包括惯导系统、卫导接收机、多普勒导航、仪表着陆系统接收机、塔康系统、微波着陆系统、大气机以及无线电高度表等。本文主要研究由惯导系统、卫导接收机、大气机数据系统和塔康系统构成的组合导航仿真系统。
惯导系统利用惯性元件测量飞机的线加速度和角速度,通过积分计算出飞机的位置、速度和姿态等信息,是一种航位推算系统,在初始对准之后,能够完全自主地提供连续、完备的导航信息。其缺点是导航误差随时间积累,必须依靠其他导航系统不断进行校正,才能保证较高的导航精度。
卫导接收机利用卫星的全球无线电导航系统,可以向用户提供高精度的三维定位、三维速度和精密时间信息。其缺点是容易受到干扰,稳定性不强。
塔康系统是由地面信标台和机载设备组成的极坐标导航系统,其与航向系统等交联后,能够为飞行员连续、自动提供载机相对于所在地面信标台以磁北为基准的全向方位角和斜距,从而确定载机所处地理坐标,完成导航任务。其缺点是作用距离有限,不能进行远距离导航定位。
大气机数据系统为机载惯导系统的垂直通道提供阻尼,抑制高度数据的发散,从而得到准确的高度数据。
2 机载导航仿真系统设计
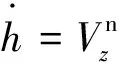
机载导航仿真系统组成如图1所示,主要包括惯导仿真子系统、卫导仿真子系统、塔康仿真子系统、大气机数据仿真子系统、组合导航仿真子系统以及误差模块。
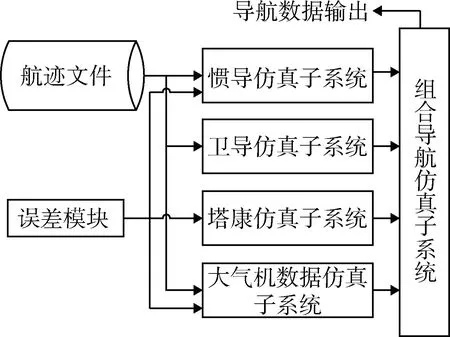
图1 机载导航仿真系统组成
在本系统中,航迹文件能够提供全套导航数据,不仅包括载机实时的位置、速度、航向和姿态信息,还包括横滚角、俯仰角和航向角的变化率,以及东、北、天方向的速度变化率信息。卫导仿真子系统和大气机数据仿真子系统利用在航迹数据基础上加入高斯白噪声和一阶马尔科夫过程进行模拟输出。
2.1 惯导仿真子系统
2.1.1 功能组成
惯导仿真子系统采取捷联式,主要由陀螺仪、加速度计仿真子模块以及惯导解算子模块组成。仿真开始,陀螺仪、加速度计仿真子模块根据读入航迹文件的姿态、速度、位置信息模拟输出角速度和比力信息,再经过惯导解算子模块输出飞行器姿态、速度和位置信息。惯导仿真子系统组成如图2所示。

图2 惯导仿真子系统组成
2.1.2 陀螺仪数学模型
1)理想陀螺仪输出模型


(1)
2)陀螺仪误差模型
根据统计规律,陀螺仪误差可表示为
εb=εc+εr+ωg,
(2)

2.1.3 加速度计数学模型
1)理想加速度计输出模型
加速度计测量值包括载机运动加速度、地球重力加速度以及由坐标系旋转及载机运动速度引起的加速度。由于该系统为模拟加速度计输出,并不能真实感知重力加速度信息,故不需要在计算过程中对其进行抵消。因此,在载体坐标系下,理想加速度计输出模型可表示为

(3)
2)加速度计误差模型
考虑加速度计的主要误差项,其误差模型为
Δb=Δr+ωα,
(4)
式中:ωα为随机白噪声漂移;Δr为随机一阶马尔可夫过程漂移。
2.1.4 惯导解算子模块
1)姿态角计算
(5)
(6)
2)速度信息计算

(7)
3)位置信息计算
由初始位置信息,可得到实时的位置信息:
(8)

(9)
(10)
式中:L、λ、h分别为机体所在位置的经度、纬度和高度;RM、RN分别为地球的长、短轴半径。
由于高度通道是发散的,因而一般不单独采用对垂直加速度计输出进行积分来取得高度,而是使用辅助手段对惯导系统的高度信息进行辅助导航,本系统采用大气机数据系统作为辅助导航手段。
2.2 塔康仿真子系统
依据塔康系统的误差特性,模拟输出塔康系统的角度、距离信息以及大气机输出的高度信息,作为组合导航模块的辅助导航信息来源。
由用户设定的塔康位置及航迹文件中载机的位置信息,可得到塔康与载机的距离和相对方位角,根据塔康系统的角度、距离均方根误差值,采用随机数模拟方法模拟角度、距离误差,得到塔康系统输出。设塔康所在位置经、纬度为(Tj,Tw),载机实时位置经、纬度为(Fj,Fw),则2个位置之间的距离为
d=Rarccos[C(π/180)],
(11)
式中:C=sinTwsinFw+cosTwcosFwcos(Tj-Fj);R=6 371.004 km。
设a为载机相对塔康的伪位置方位角,A为载机相对塔康的真实位置方位角,c为中间变量,则可得到
cosc= cos(90-Fw)cos(90-Tw)+sin(90-Fw)×
sin(90-Tw)cos(Fj-Tj),
(12)

(13)
根据载机和塔康的相对位置关系,可知:
1)当载机相对塔康在第一象限时,A=a;
2)当载机相对塔康在第二象限时,A=a+360°;
3)当载机相对塔康在第三、四象限时,A=180°-a。
在已得到的距离和方位角信息上加入符合高斯分布的白噪声和一阶马尔科夫过程作为塔康获得的数据,在此基础上联合塔康位置信息反推载机位置,即为塔康的导航输出数据。
2.3 组合导航仿真子系统
2.3.1 子系统功能组成
组合导航仿真子系统将惯导、卫导、塔康和大气机仿真产生的导航信息作为输入信号,送入卡尔曼滤波器进行组合,将组合后的导航信息反馈给惯导测量单元进行校正。本文采用离散化间接输出校正的滤波方式[9],将惯导作为公共参考系统,分别构成惯导/卫导、惯导/塔康以及惯导/卫导/大气机组合导航卡尔曼滤波器,通过计算获得系统惯导误差的最优估计值。图3为组合导航仿真子系统组成。
图3 组合导航仿真子系统组成
2.3.2 仿真模型
卡尔曼滤波包括预测和更新2个阶段。在预测阶段,滤波器应用上一状态的估计对当前状态进行估计;在更新阶段,滤波器利用当前状态的观测值优化预测阶段的预测值,以获得一个更精确的当前状态的估计。系统状态方程为
XK=ΦK,K-1XK-1+ΓK-1WK-1,
(14)
系统量测方程为
ZK=HKXK+GK,
(15)

(16)
为系统状态向量,其中,E、N、U分别表示导航坐标系东、北、天方向,φE、φN、φU为平台误差角,δVE、δVN、δVU为速度误差,δL、δλ、δh为位置误差;Φ为一步状态转移矩阵,Γ、H为系统参数矩阵,根据文献[10]可得其具体表达式;W、G均为零均值高斯白噪声;Z为量测量,由具体滤波数据决定。
1)惯导/卫导卡尔曼滤波量测方程

(17)
2)惯导/塔康卡尔曼滤波量测方程
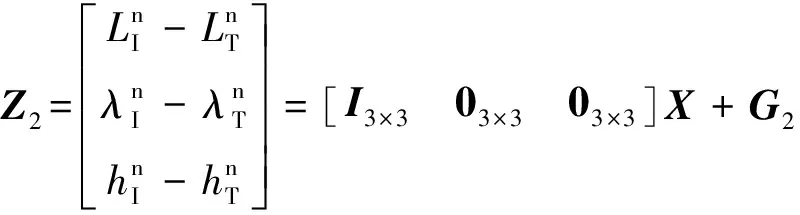
(18)
3)惯导/卫导/大气机卡尔曼滤波量测方程

(19)
3 机载导航仿真系统实现
3.1 系统工作流程
机载导航仿真系统运行时,首先读取航迹文件,之后进行导航方式选择,经过解算得到最后的导航结果,同时以数据和视图的方式输出,其工作流程如图4所示。其中,惯导、塔康系统的解算流程分别如图5、6所示。
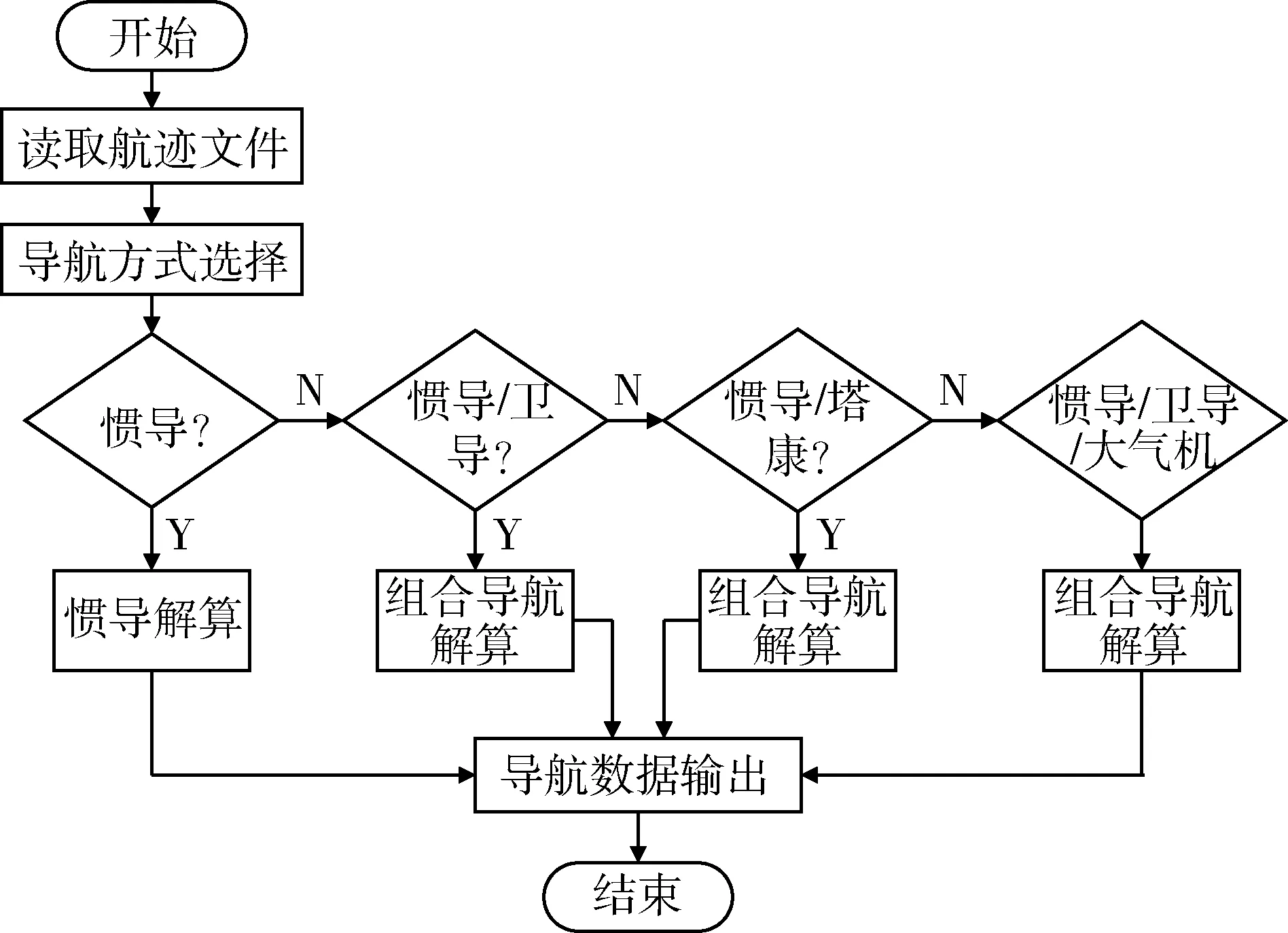
图4 机载导航仿真系统工作流程
组合导航解算以惯导/卫导/大气机组合为例,其解算过程如下:1)读取航迹文件数据;2)进行3种方式的导航解算,输出导航数据;3)对导航数据进行卡尔曼滤波,得出最优误差估计,并对惯导进行校正。惯导/卫导/大气机组合导航解算流程如图7所示。
3.2 系统仿真界面及结果
机载导航仿真系统是在Visual Studio 2010开发环境下完成的,操作界面由地图航迹、导航数据与目标数据、模式选择与参数设置以及操作控制等部分组成,分别如图8-11所示。
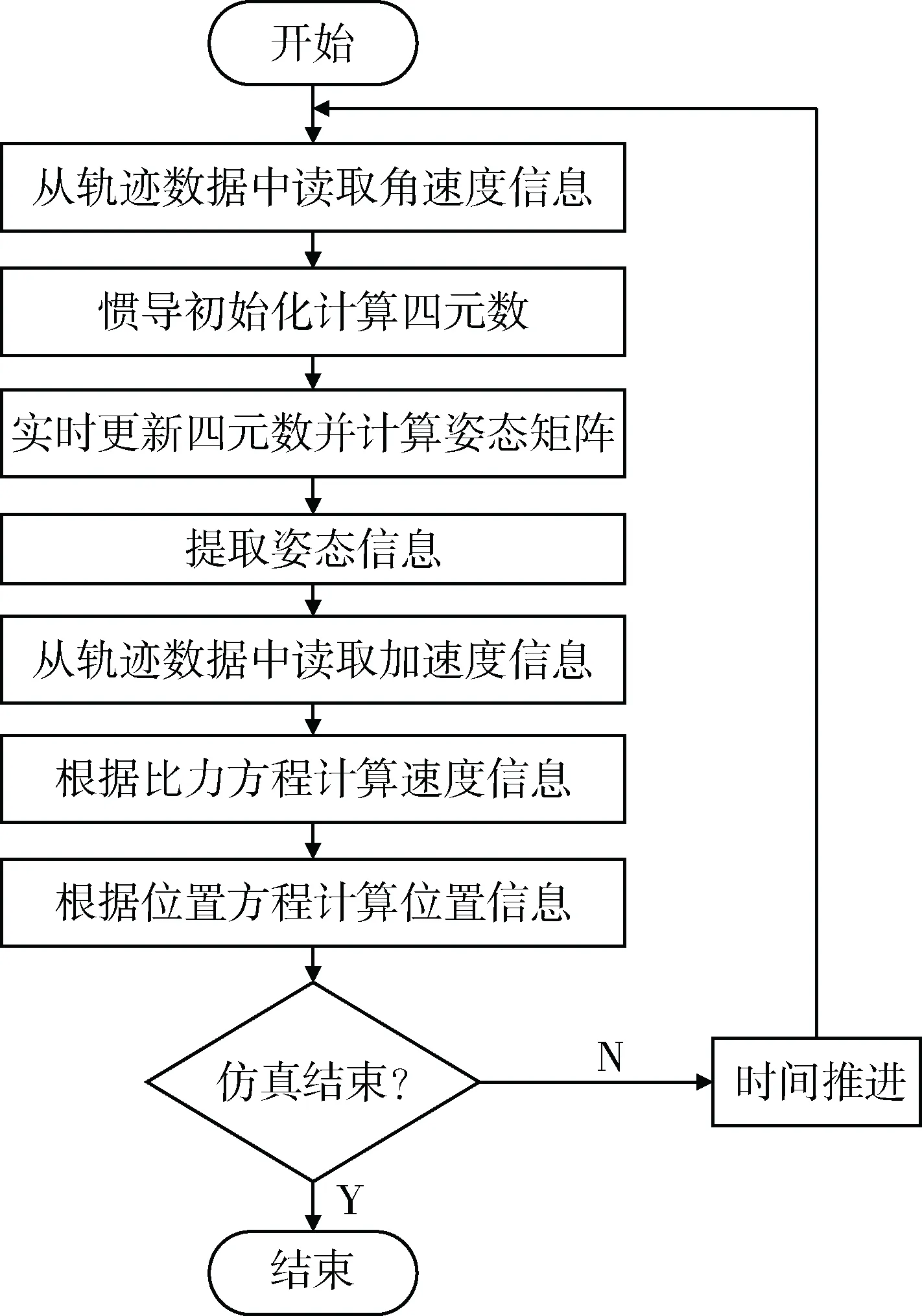
图5 惯导系统解算流程
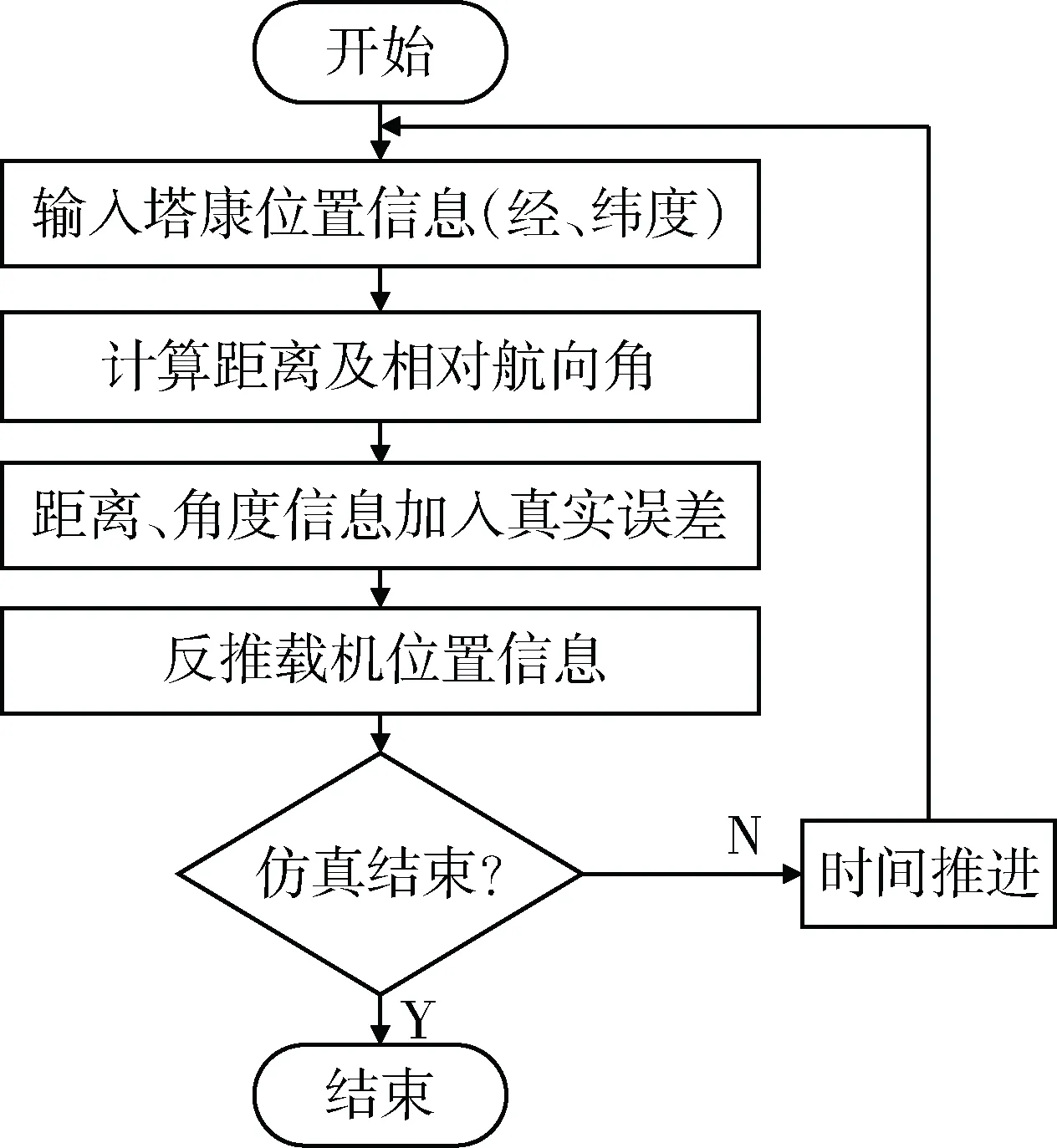
图6 塔康系统解算流程
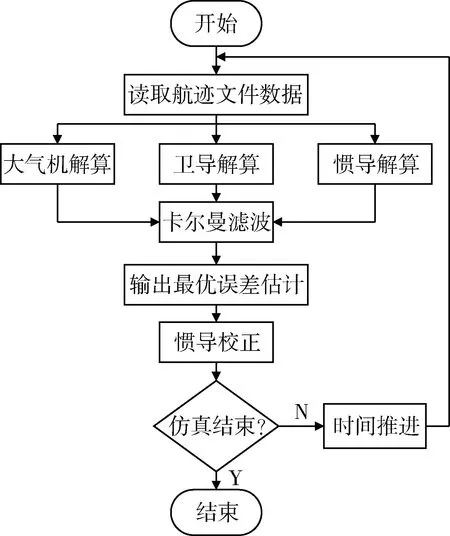
图7 惯导/卫导/大气机组合导航解算流程

图8 机载导航仿真系统地图航迹界面
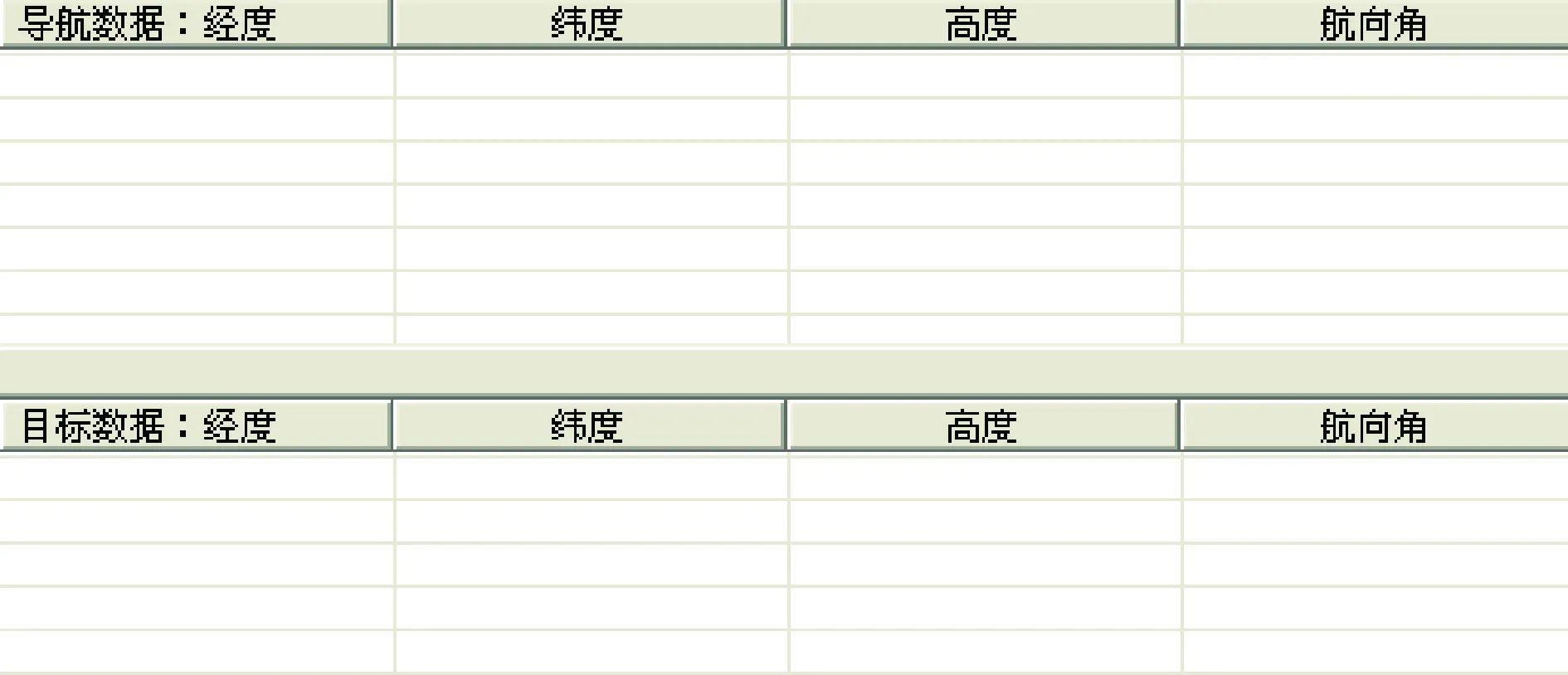
图9 机载导航仿真系统导航数据与目标数据界面
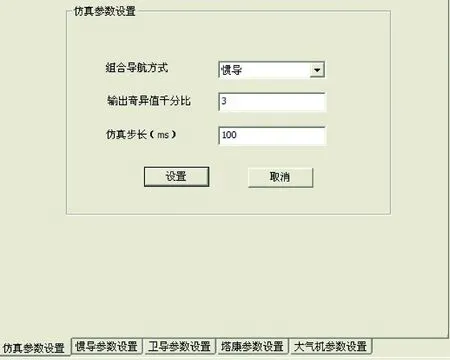
图10 机载导航仿真系统模式选择与参数设置界面
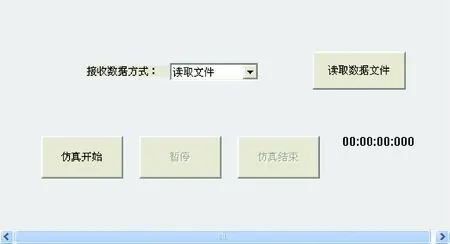
图11 机载导航仿真系统操作控制界面
仿真过程如下:1)根据需求在相应菜单下对导航模式、对应参数和误差范围等进行设置,如图10、12所示;2)选择要读取的导航轨迹文件,按下“仿真开始”按钮进入仿真阶段;3)按下“停止”按钮停止仿真,按下“退出”键将退出仿真界面。
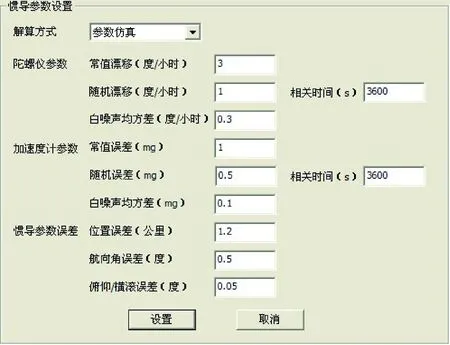
图12 惯导参数设置界面
在仿真阶段,系统在设置的仿真步长时间内不断更新数据,通过地图与数据的对比,更直观地显示载机位置和姿态的变化。以步长时间100 ms为例,图13为惯导模式下的导航仿真结果,图14为惯导/卫导/大气机组合模式下的导航仿真结果。其中:红色航迹为航迹文件提供的目标航迹;蓝色航迹为经过解算的导航航迹。
由图13、14可以得出:惯导系统存在误差,且误差随时间不断累积;而由惯导、卫导、塔康和大气机数据系统构成的组合导航系统能够定时对惯导系统进行初始化,消除惯导系统的累积误差,输出更为精确的机载导航数据。

图13 惯导模式下的导航仿真结果
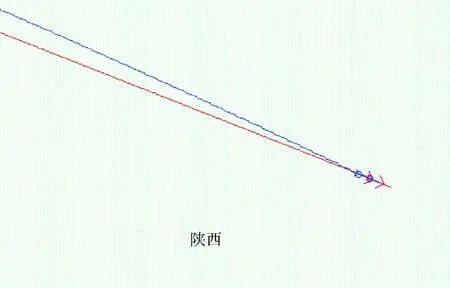
图14 惯导/卫导/大气机组合模式下的导航仿真结果
4 结论
笔者构建了包括惯导、卫导、塔康、大气机数据系统以及组合导航在内的机载导航仿真系统的数学模型,并在Visual Studio 2010环境下进行了系统的仿真开发。与其他导航仿真系统相比,该机载导航仿真系统的导航方式相对全面且完善,不仅可以在实验室环境下获取全套导航数据,还能以可视化的方式动态显示载机的飞行姿态,为相关导航算法提供了验证平台,同时为系统的方案论证、系统设计提供了可靠的数据。该仿真系统在组合导航模块采用了松耦合的解算方法,若采用紧耦合或超紧耦合解算方法,将会得到更准确的导航数据,笔者下一步将对此展开进一步研究。
[1] 王磊,史丰丰.基于SINS/GPS的无人机组合导航系统建模与仿真[J].测绘工程,2016,10(3):17-19.
[2] 高扬,徐景硕.捷联惯导可视化仿真系统设计与实现[J].价值工程,2016,35(25):229-231.
[3] 王振凯,黄显林.惯性卫星紧组合导航系统仿真分析[J].导航定位与授时,2015(1):30-35.
[4] 周懿,汪小飞.捷联惯导/北斗高精度组合导航方法研究[J].计算机测量与控制,2016(4):261-264.
[5] 牛强军.美军机载导航设备及其发展[J].西安航空技术高等专科学校学报,2009,29(5):4-7.
[6] 刘彦博,肖鹏译.Visual Studio 2010技术大全[M].北京:人民邮电出版社,2008.
[7] 王新龙.惯导基础[M].西安:西北工业大学出版社,2012:191-232.
[8] 高钟毓.惯导系统技术[M].北京:清华大学出版社,2012:192-194.
[9] 刘建业,曾庆化.导航系统理论与应用[M].西安:西北工业大学出版社,2009:334-352.
[10] 李路苹,徐景硕.基于VS的捷联惯导系统仿真器设计[J].计算机仿真,2013(6):94-98.
(责任编辑: 尚彩娟)
Modeling and Simulation of Airborne Navigation System
HOU Li-zhi1,2, HE Jing1
(1. Information and Navigation College, Air Force Engineering University, Xi’ an 710077, China; 2. Troop No.94498 of PLA, Nanyang 474370, China)
Aiming at the problem that it is difficult to obtain the airborne real-time navigation data in the laboratory environment, by using modular design idea, the authors design simulation system of military airborne navigation system based on the known flight path in the development environment of Visual Studio 2010. It outputs verisimilitude navigation data and provides reliable data source for project approach, systematic design and verification evaluation of airborne flight control system. It also provides verification platform for the research of navigational computer arithmetic.
airborne navigation system; flight path; modeling; simulation
1672-1497(2017)02-0090-06
2017-01-04
侯立志(1987-),男,硕士研究生。
V249.32+8; TP391.9
A
10.3969/j.issn.1672-1497.2017.02.019
猜你喜欢
航天电子对抗(2022年4期)2022-10-24
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
数字海洋与水下攻防(2020年5期)2021-01-04
兵器装备工程学报(2020年9期)2020-10-12
雷达科学与技术(2020年4期)2020-09-11
科技创新与应用(2019年24期)2019-10-24
北京航空航天大学学报(2018年1期)2018-04-20
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
计算技术与自动化(2014年1期)2014-12-12
