体感型智能轮式机器人设计
2017-05-08 12:14季彬铭潘宝珠王爱红许惟超孙静
科技创新与应用 2017年12期
关键词:机器人
季彬铭+潘宝珠+王爱红+许惟超+孙静

摘 要:设计了一种基于体感控制模块的新型遥控轮式机器人。利用信息检测模块(数字加速度传感器)测量体感控制模块姿态的数字信号,经由中央处理器模块(单片机)进行处理,将得到的倾角和倾斜方向转化为控制信号,利用通信模块(无线蓝牙)进行信息传输,通过电机驱动模块驱动直流电机,实现轮式机器人的运动控制。
关键词:机器人;STC89C52单片机;加速度传感器;无线蓝牙传输
1 概述
体感技术的特点,在于人们不必使用任何复杂的控制设备,直接地进行肢体动作,便可让人们身临其境地与周边的装置或环境进行互动。近年来体感技术广泛应用于3D虚拟现实、空间鼠标、游戏手柄、运动监测、健康医疗照护等领域,取得了巨大的发展[1-2]。
该设计是以两个单片机为控制核心,数字加速度计作为体感元件,以直流电机作为驱动与转向装置,利用无线蓝牙技术进行通信的智能操控系统。本设计体现了检测、电路、自动控制和无线传输等方面的技术,可在特定环境中完成体感控制,稳健行驶。
2 无线通信模块(蓝牙)的总体设计
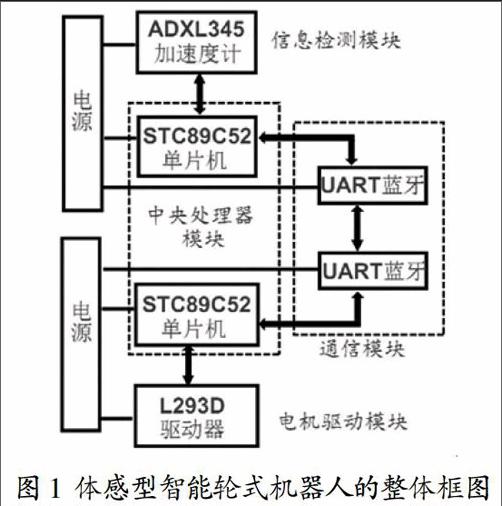
该智能机器人系统是由中央处理器模块(单片机)、无线通信模块(蓝牙)、信息检测模块(数字式加速度传感器)、电机驱动模块、电源等部分组成,其整体结构框图如图1所示。
中央处理器模块选用STC89C52单片机[3],是体感型智能轮式机器人的关键;信息检测模块采集到加速度信号经过处理器进行分析和处理,然后通过电机驱动模块控制機器人的运行状态,从而实现轮式机器人平稳行驶。
信息检测模块选择ADXL345数字式加速度传感器[4]。ADXL345传感器具有体积小、功耗低、分辨率高,测量范围大(±16g)的特点。单片机可通过SPI或I2C通信方式直接从ADXL345内部的DATAX0、DATAX1、DATAY0、DATAY1、DATAZ0、DATAZ1 6个寄存器中读出加速度数据。通过对这6个寄存器的数据进行组合得出 X,Y和Z三轴的加速度数据,加速度值与数字输出数据呈线性关系。本设计采用两线制的I2C总线协议,可以用于三轮或四轮智能机器人的控制。
3 加速度测量原理
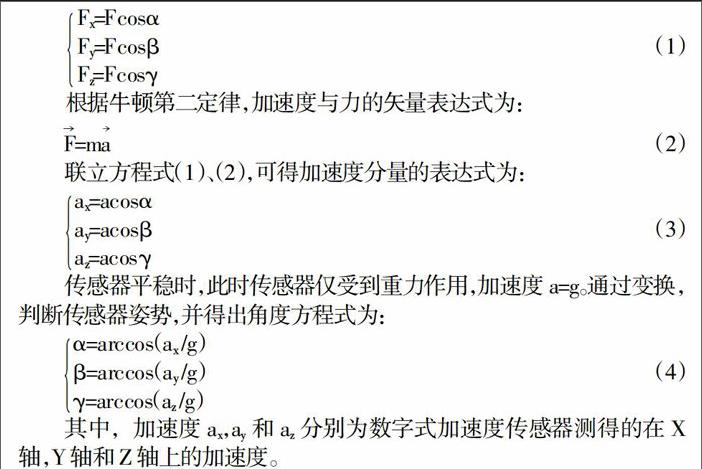
设α,β和γ分别为力F与X轴、Y轴和Z轴的夹角,如图2所示。根据力学知识可得,力F在X轴、Y轴和Z轴上投影的表达式为:
根据牛顿第二定律,加速度与力的矢量表达式为:
联立方程式(1)、(2),可得加速度分量的表达式为:
传感器平稳时,此时传感器仅受到重力作用,加速度a=g。通过变换,判断传感器姿势,并得出角度方程式为:
其中,加速度ax,ay和az分别为数字式加速度传感器测得的在X轴,Y轴和Z轴上的加速度。
4 程序设计
采用模块化设计方法,在Keil uVersion5环境下采用C语言编写程序。相关程序主要包括主程序、电机驱动程序、遥控控制程序等,系统软件总流程图如图3所示。
5 结束语
本设计采用ADXL345数字式加速度传感器作为体感控制器,经典的STC89C52单片机作为中央处理器,性价比较高的UART蓝牙技术作为通信手段,实现了通过手势改变无线控制智能轮式机器人运转的目的。通过改变体感遥控器的前倾、后倾、左倾和右倾的姿势,无线遥控了机器人的前进、后退、左转和右转的运动。实验测试结果显示:轮式机器人符合体感控制要求,反应灵敏,行动可靠。
参考文献
[1]林德江,井志胜,王国德,等.基于Leap Motion体感控制技术的数字化展示系统研究[J].火炮发射与控制学报,2015,36(04):86-90.
[2]师丹玮.体感操控:视觉识别比加速度传感器更适合[J].集成电路应用,2013,08:22-23.
[3]陈明妙,吴汶,李曼.基于STC89C52单片机的智能寻迹小车的设计[J].湛江师范学院学报,2013(6).
[4]袁西,陈栋,田湘,等.三轴数字加速度计ADXL345及其在捷联惯导中的应用[J].电子设计工程,2010(3).
猜你喜欢
红领巾·萌芽(2022年2期)2022-01-31
学苑创造·A版(2017年9期)2017-09-25
知识就是力量(2017年2期)2017-01-21
快乐作文·低年级(2016年9期)2016-09-30
南风窗(2016年7期)2016-03-31
知识就是力量(2016年2期)2016-02-01
小朋友·快乐手工(2015年11期)2016-01-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07