一种路面坑洼、拥包预警系统的设计
2017-05-08 07:41刘紫扬
科技创新与应用 2017年12期
刘紫扬
摘 要:路面坑洼或拥包若得不到及时维护,将成为车辆行驶中的潜在危险。文章针对这一问题,以STM32单片机为主控芯片,用硬软件结合的方式实现路面坑洼或拥包的预警。
关键词:3D激光雷达;点数据;STM32单片机;预警系统
1 概述
随着城市化进程的快速发展和機动化水平的提升,人们对城市化道路的需求也越来越高。人们在出行时不仅会考虑安全便捷性,更会追求出行的舒适感。而道路由于路面出现坑洼或拥包,若得不到及时维护,给通行车辆布下各式各样“地雷阵”,有的甚至成为了“马路杀手”。路面坑洼或拥包不但影响出行舒适感,而且会损坏车身,造成损失。在车速较快的情况下,甚至会因爆胎酿成交通事故,威胁驾驶人员及乘客的生命安全。
目前国内外对路面坑洼、拥包预警系统的研究尚处于理论和研发层次。国外主要是通过接触式预警,精度虽高,但给驾驶员的反应时间不多,容易造成交通事故,国内也有通过使用道路激光平整度测试车利用激光的光时差原理来测定路面的凹凸状况[1],但难以推广;至今,国内外主要是借助车载移动激光扫描仪[2]实现非接触式预警,对道路及周边环境进行扫描,获取激光点所接触物体的三维坐标,但是其整个系统的复杂,导致体积大,应用于私家车会影响车体美观。
2 设计与实现
路面坑洼、拥包预警系统主要分为三个部分:数据采集模块、数据处理模块以及预警传输模块,具体装置及各部分作用机理下面进行详细介绍。
2.1 设计思路
本设计主要是通过在挡风玻璃正上方处安装3D激光雷达,实时采集前方路面信息(平面、拥包或坑洼),采用STM32单片机作为主控芯片,对采集的数据进行处理,判断车辆是否能够平稳地通过,前方坑洼或拥包则向驾驶员反馈情况,并将路面坑洼或拥包的位置传送至维修部门。
2.2 系统关键技术分析
本系统主要由3D激光雷达和STM32单片机组成。系统设计满足“三高”要求:高安全性、高稳定性、高准确性。
2.2.1 3D激光雷达设计
3D激光雷达由激光测距仪、角度测量系统、GPS数据接口以及信息输出模块组成。简单的二维结构光扫描是以点激光成像的原理来测量与物体的距离,而道路坑洼或拥包则是以三维空间的形式存在,因此本系统采用的是三维扫描系统,由激光测距仪与与角度测量系统组合的自动化快速测量系统。发射的激光束对被测物体进行快速扫描测量,直接获得激光点所接触的物体表面的水平方向、天顶距、斜距等数据信息,作适当的处理后,获得坑洼或拥包表面的点云数据并存储。
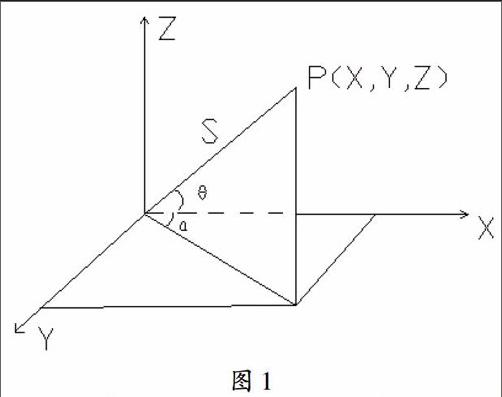
(1)坐标点的采集。所测得的点云数据为空间点坐标,是基于球坐标进行测量,XOY面为横向扫描面,Z轴与横向扫描面垂直。(注:此处假设车辆已检测到前方坑洼或拥包)
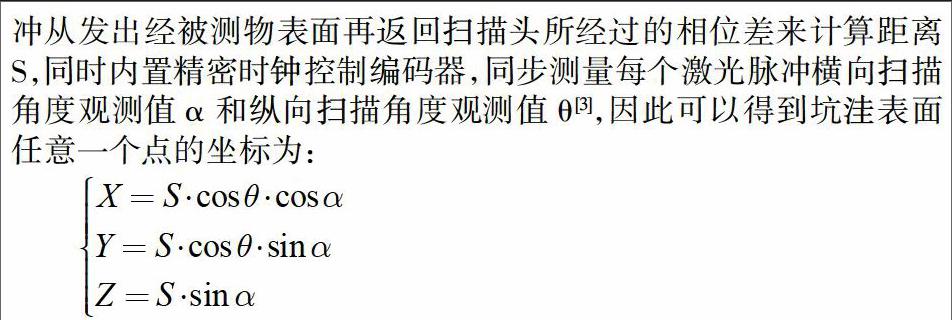
扫描头通过两个同步反射镜快速而有序地旋转,将激光脉冲发射体发出的窄束激光脉冲依次扫过前方扫描区域,测量每个激光脉冲从发出经被测物表面再返回扫描头所经过的相位差来计算距离S,同时内置精密时钟控制编码器,同步测量每个激光脉冲横向扫描角度观测值?琢和纵向扫描角度观测值?兹[3],因此可以得到坑洼表面任意一个点的坐标为:
(2)数据点的转换与传输。将3D激光雷达的数据接口与GPS相接,并通过软件对点云数据进行预处理、插补、缝合并重构模型,最后对实物模型的数据点进行解析,得到电子地图显示的大地坐标系,因此通过3D激光雷达测得的数据信息经处理可直接传输至STM32单片机分析判断。
2.2.2 STM32单片机设计
该模块主要是通过软件对接收的信息进行分析判断并传输数据,单片机芯片对路面坑洼或拥包是否符合报警的条件进行分析判断,若前方坑洼或拥包对车辆行驶无影响则激光雷达继续采集数据,否则预警模块启动并以将实物模型以图像形式提示驾驶员减速慢行,随即将坑洼或拥包的大地坐标位置信息传输至道路维护部门,以便路面情况得到及时的改善。
以上功能的实现可通过软件编程的方法实现,以下针对触发预警的条件作具体分析:
条件1:坑洼或拥包大小分析
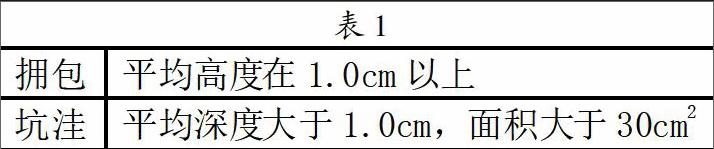
根据交通部《公路沥青路面养护技术规范》(JTJ 073.2-2001)中规定,将以下情况路面病害视为对车辆行驶有较大影响的坑洼或拥包。
因此,在作判定条件分析时,将平均高度大于1.0cm的拥包或平均高度大于1.0cm且面积大于30cm2的坑洼作为报警的首要条件。
条件2:车轮是否会压过坑洼或拥包
在满足条件1的前提下, 再判断车轮是否压过坑洼或拥包。通过3D激光雷达测得的坑洼或拥包表面的数据点通过拟合可以得到其大致的函数图像,可找到曲线的波谷或波峰位置,再利用测得激光点所接触的物体表面的水平方向、天顶距、斜距等数据信息可计算出前车轮与坑洼或拥包相对位置,当车轮边缘与波谷或波峰位置大于标定安全值则不启动报警,否则,启动报警模块。
3 结束语
国内外针对道路坑洼或拥包的预警研究尚且停留在接触式预警,对于非接触式预警理论研究也不多,因此,具有广阔的发展空间。本设计整合现有成熟技术,借助STM32单片机微型芯片处理,具有体积小、低能耗,高稳定等优点,可实现车辆的平安出行。近年来,“平安交通”愈来愈受到交通运输部门的关注,本文研究的对路面坑洼或拥包的检测适用于所有车辆,可在恶劣环境下工作,一旦实际应用,可最大程度上保证出行安全。应用前景广阔。
参考文献
[1]曾胜,王光普,曾庆霞.两种平整度检测仪器的对比研究[J].中外公路,2007,10(5):4-5.
[2]吕冰,钟若飞,王嘉楠.车载移动激光扫描测量产品综述[J].测绘与空间地理信息,2012,6(6):184-185.
[3]吴耀,龚 .基于激光扫描技术的三维模型重建[J].科技信息,2013,3:102-103.
猜你喜欢
汽车观察(2021年8期)2021-09-01
科技研究·理论版(2021年20期)2021-04-20
西部交通科技(2021年9期)2021-01-11
计算机与网络(2020年19期)2020-12-04
疯狂英语·读写版(2019年7期)2019-09-10
环球时报(2018-12-07)2018-12-07
语文世界(小学版)(2017年11期)2018-01-02
爆笑show(2015年5期)2015-07-09
新媒体研究(2014年14期)2014-08-22
儿童时代(2014年2期)2014-03-04