基于ARM智能交通灯控制系统的设计
2017-05-08 07:16晁松杰
科技创新与应用 2017年12期
关键词:控制系统
晁松杰
摘 要:随着社会发展,人们生活水平有了质的提高,越来越多的人利用汽车进行代步,汽车保有量逐步增多,这使得道路压力越来越大,交通状况日益严峻。针对上述情况,缓解道路压力的传统方法是对道路进行扩宽、把路网密度适当增大,建立起立体交通网模式。但由于城市空间密集型程度越来越高,上述传统方法对路面交通状况的缓解显得有点疲软,因此,如何利用现行的智能化控制技术来解决交通问题。文章以交通路口的通行为研究对象,阐述了基于ARM交通灯的智能控制,为智能交通的研究提供了理论参考。
关键词:ARM;智能交通灯;控制系统
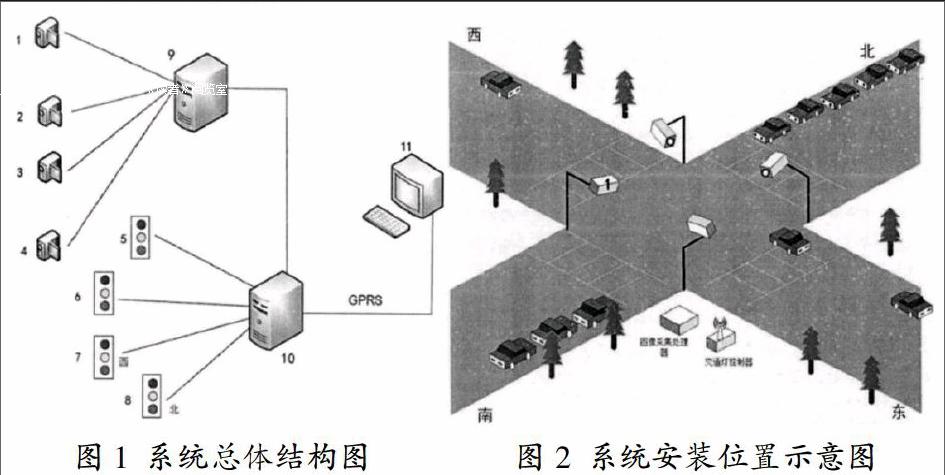
1 系统总体结构
如图1所示,交通灯布置为东、南、西、北四个方向,每个方向交通灯上再配备对应的摄像头,摄像头的功能用于探测所属方向车辆通行情况(车辆等待队列,车辆通行量)。ARM处理器中的9号、10号功能, 9号用于处理图像反馈信息,10号用于处理9号反馈信息对信息中的车辆排队情况作交通灯的智能控制,除此之外10号控制器ARM还与通讯监控中心保持通信。
如图2所示,摄像头拍对面驶来的车辆,摄像区域对着车辆车道的中心,微微往下偏斜,其拍摄的情景要包含车辆的停止线,远景涉及的区域要覆盖面广。摄像头在安装时一定要稳,防止抖动带来的负面不确定性,当道路车流量多时应该根据实际情况加大摄像头的量。交通灯的安装位置应该与实际路口情况因地制宜。
2 系统硬件组成
系统硬件包括以下几个主要模块:
2.1 ARM嵌入式处理器模块
ARM(Advanced RISC Machines)的英文名称有多种解释,一类解释是一个公司名称的缩写,一类解释是这类微处理器模块的通用代号,还有一类解释是一种技术名称的统称。ARM处理器的特点主要归纳总结为三个方面:(1)电量损耗低功能丰富;(2)具有16位与32位的双指令集;(3)其研发与多家厂商合作,兼容性较好。随着技术的日新月异,ARM的发展延续了众多体系,体系不同其特征也存在较大差别,但如果体系一致虽拥有众多处理器内核但大体是相同的。
ARM发展经历了众多阶段,从起初的发展阶段,即ARM V1到ARM V3阶段,到后来的ARM V4到ARM V7阶段,ARM的应用正逐步趋于成熟。ARM V4的体系代表有3种,分别是ARM7、ARM9以及Strong ARM。ARM V5的体系代表有4种:ARM 10、 Xscale、DSP指令集及JAVA。ARM V6的体系代表有4种:ARM11、 定点DSP功能、性能提高8倍的JAVA和音视频性能优化4倍的Media。ARM V7的体系代表有A系列、M系列与R系列,A系列是根据用户需求不同提供全方位智能控制操作平台的单片机,R系列是实时系统控制单片机,M系列是低端控制型单片机。
本文的控制系统在研发阶段是基于S3C2410处理器,该处理器由Samsung公司生产,处理器的设计理念源于ARM9,其基本功能框架结构都是基于ARM9。从其系统的硬件原理图可以得出,整套系统需用到双ARM处理器,其处理器主频可达266M,一个处理器用于处理图像,另一个处理器用于实现控制,两个处理器之间可以通过多种方式进行相互联系。
.SPI方式
SPI总线方式是摩托罗拉公司推出的,实现了同步三线方式接口通信,该三线分别掌握不同的输入输出功能,其中包含时钟传输线(SCK),数据流输入线(MOSI),数据流输出线(MISO);这些传输线是CPU与各种外围设备沟通的桥梁。SPI在其应用过程中主要有如下特点:(1)同步发射与接收串行数据;(2)可通过频率来对时钟进行程序编制;(3)可用于主机或者工作机使用;(4)拥有中断结束标志;(5)拥有矛盾冲突保护功能;(6)具备总线竞争保护功能。
.IZC方式
是一个多主机的总线,具备多主机系统所需的包括总线裁决和高低速器件同步功能的高性能串行总线。
IZC总线利用两根双向信号线,数据线SDA和时钟线SCL在连接到总线的器件间通信。每个I2C总线器件都有唯一的地址识别。
.DART串口方式
串口通信技术概念通俗易懂,其串口发送与接收字节是按位进行。尽管串口通信按字节进行并行发送速度较慢,但其串口可以实现在同一根线进行输入、输出数据的传输,串口通信接口的输入输出数据的传输使用方便,其串口都有统一的标准协议。串口在应用过程中,串口实际就是对应的物理变量地址,对串口进行操作就是对物理地址进行操作,因此串口方式的通信编程方式较为简单。本文所需的两个平台都有对应的串口集成,为了便于连接,这里选用的通信方式就是串行接口通信。
在该部分内容中,除处理器外还包含一些存储设备,而本文主要阐述了智能交通灯的主要控制原理,因此在这里就具体展开介绍了。
2.2 摄像头模块
摄像头根据感光元器件的差异,可分为两类:CCD与CMOS,两者在其應用过程中根据自身特点各有利弊。通常认为CMOS在应用过程中功耗比较低,而CCD则成像效果较好。因此,交通监控的摄像装置通常采用CCD摄像头。目前,随着互联网时代的发展,市面上摄像装置多数都自带WIFI功能,这对交通网络的监控系统提供了一个研发方向,在实际应用中自带WIFI功能的摄像头避免了布线的繁琐,极大地提高了应用效率。
2.3 无线模块
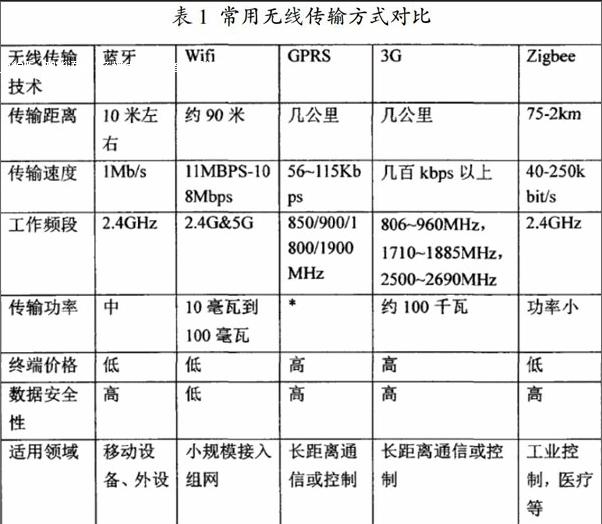
系统在设计及应用过程中,为了避免突发情况的发生,都应设置故障报警功能。在交通系统中,路口交通装置发生故障,同时工作人员无法知晓的情况下,其交通就会陷入混乱,轻则交通堵塞重则酿成交通事故,因此报警系统不仅有而且需具备时效性。在实际系统管理工作中,管理人员通常处于远离实际交通信号源的监控室内,而为了能实时监控路口交通灯情况,这里就要用到一些无线传输方式。表1就是应用较多的几种无线传输方式。
从表1中可以看出,一些无线传输方式的传输距离较短,如蓝牙、Wifi和 Zigbee。本文所需的无线传输需要大距离大范围的传输方式,如3G网络和GPRS。
3G网络,传输量大、速度快,信号有时不稳定;GPRS传输范围广、成本低且信号稳定,号称“永远在线,永远连通”的技术。智能交通灯的远程信号传输对速度要求没有那么高,再综合性价比考虑,这里选用GPRS的无线传输方式进行故障报警。
2.4 电源模块
电源是整个系统的动力源,对于整个系统运行过程处于至关重要的作用,系统中不同模塊对供电需求也各不相同。交通灯电压在12-24V,摄像头电压在12V,核心模块电路板S3C2410标准电压在3.3 V。因此,电源模块设计需根据系统整理电量要求进行总体设计。
本文设计的系统,其电源模块还特别加了应急电源部分,通过应急电源电池可在系统发生断电时给监控中心发出报警。
3 系统软件组成
系统软件组成分为四个主要模块:
3.1 操作系统--Linux
Linux是属于源代码操作系统,不存在黑箱技术;特点是内核小,运行、更新快;具有稳定性好、移植能力强、网络功能强大、兼容性好等特点。它是免费的IOS,在市场极具竞争性。这里选用的操作系统就是Linux系统。
3.2 路口车辆等待情况监测模块
该模块是通过分析摄像头的图片来反馈路口车辆的通行状态,根据图片中反映出的车辆路口等待情况,并利用智能控制模块来实现交通路口交通灯的智能控制。
3.3 智能交通灯的控制模块
该模块主要是根据路口交通灯车辆通行状况的图片来获取路口各方向车辆的等待情况,并根据具体获取的信息来选择交通灯的延迟方案,并将最终方案反馈给路口车辆等待情况监测模块。
3.4 紧急故障报警处理模块
该模块主要功能是检测反馈系统故障,系统在工作过程中一旦出现问题,该模块会通过GPRS定位到故障源并及时将故障信息反馈到实时监控中心,监控中心得到信息后会立即通知相关管理人员作相应处理。如果在系统运行过程中,电源出现突然断电的情况,则紧急应急电源会立刻启动进行临时性供电,以完成系统故障报警。
4 结束语
本文主要介绍了系统的整体设计。首先对系统进行了需求分析和可行性分析,针对需求对系统软硬件进行整体设计。在本文,硬件部分只对其架构提出整体设计,这里不做详细介绍。
参考文献
[1]栗海晶,王力强.欧洲智能运输系统(ITS)的研究及发展现状[J].黑龙江交通科技,2009(07):189-191.
[2]金茂著.中国智能交通发展历程浅谈[J].交通科技,2013(02):140-142.
[3]禹翔.城市交叉路口交通灯控制系统的设计研究[D].长安大学,2011.
猜你喜欢
考试周刊(2016年88期)2016-11-24
科教导刊·电子版(2016年26期)2016-11-21
数字技术与应用(2016年9期)2016-11-09
科技视界(2015年25期)2015-09-01