
武术擂台赛机器人的软硬件优化与策略研究
2017-05-06 11:36许建荣张小凤林景生陈玉云钟保森
科技资讯 2017年7期
许建荣+张小凤+林景生+陈玉云+钟保森
摘 要:随着社会的不断发展与进步,随着科技与智能技术的快速发展、教育理念的不断改革与进步,作为一门综合性较强的学科——机器人学科也在不断发展壮大。擂台机器人的设计与研究是关于机械学、电子学、计算机技术、人工智能的综合体,也是大学生机器人爱好者的感兴趣之所在。该文介绍了武术擂台机器人硬件与软件的优化,以及一些进攻与防守的策略。
关键词:武术擂台机器人 软件 硬件 策略
中图分类号:TP24 文献标识码:A 文章编号:1672-3791(2017)03(a)-0097-04
由中国自动化学会机器人竞赛工作委员会、RoboCup中国委员会共同举办的中国机器人大赛暨RoboCup公开赛旨在激发广大学生对机器人的热情,培养实践能力和科技创新的潜力,提高大家的综合素质,同时通过机器人竞赛活动推动我国机器人技术的发展与尝新。武术擂台赛机器人是每年一度的“中国机器人大赛暨RoboCup 公开赛”中的一个比赛项目,参赛队伍需要在规则范围内设计、组装能自主运动的机器人互相搏击,并争取在比赛中将对方机器人打下擂台获胜。以中国机器人大赛武术擂台赛为背景设计,着重介绍无差别组武术擂台赛机器人竞赛的硬软件优化与策略研究。
针对该次大赛机器人的搭建,我们秉承科技创新的理念,以严谨的态度和乐于挑战的精神,在最大程度上使得机器人在软件策略和硬件构造上相契合,使机器人能够很好地完成比赛设置的任务。
1 硬件的设计
1.1 整体结构
(1)重量:应尽可能接近比赛要求极限,只有重量越重,给机器人轮子提供的正压力才能越大,根据f =uF,则知对擂台的摩擦越大,才能有效防止己方被推下擂台。
(2)尺寸:尺寸大小也应当尽量接近比赛限制,只有通过长宽的最大极限来降低机器人的整体重心,才可以使機器人在擂台上更好地稳定行走,减少由于惯性引起的失误。
(3)重心:重心是取决于比赛胜负的重要因素,也是实现策略运动的一切前提条件。重心稳定,实现各类策略误差会大大减小。对于较重的控制器,应该放平于底板,根据实践的结果,放于底板中间(误差5%)的整体效果最好。避免过高的组装结构也是重点,在机器人竞争互碰的较高速度下,不能忽略由于高速产生的阻力与反阻力对机器人的影响,会让对手瞬间抓住机会一击而乱。
1.2 传感器的介绍与配合安置
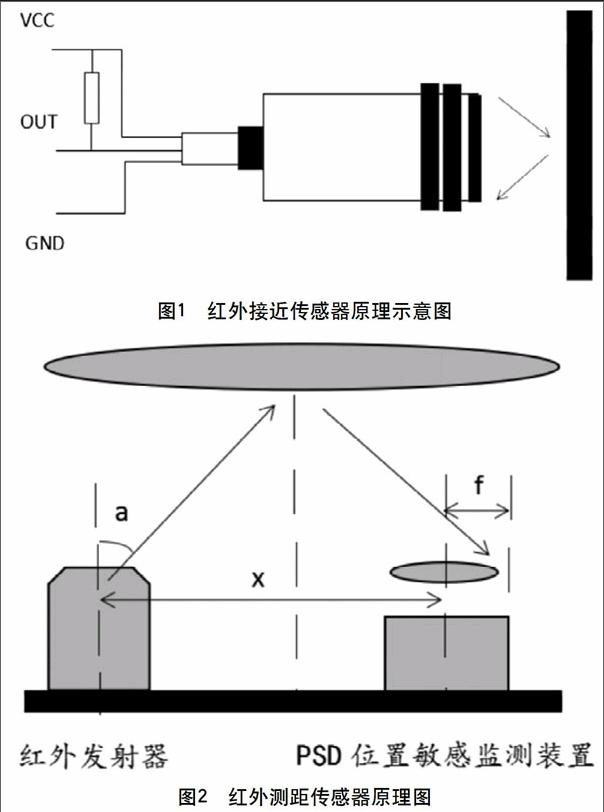
1.2.1 红外接近传感器
红外接近传感器俗称光电开关,它是根据目标对红外光束的遮挡或反射由同步回路连通电路,从而达到检测目标的有无,其原理如图1所示。
光电开关根据其不同机理又可分为漫反射式光电开关、镜反射式光电开关、对射式光电开关、槽式光电开关、光纤式光电开关等,“创意之星”套件中所使用的是漫反射式光电开关。我们安装的时候在同等位置下根据不同的转度,它的反射与接收点的不同会产生不同的距离差别。所以安装调试后要扭紧传感器,避免由于激烈碰撞后改变了原本的结果。还有必须注意的是,我们检测边缘红外传感器,调试的近远要合适,既要避免由于碰撞翘起使机器人以为是边缘,也要避免机器人把两个坡度看成擂台。
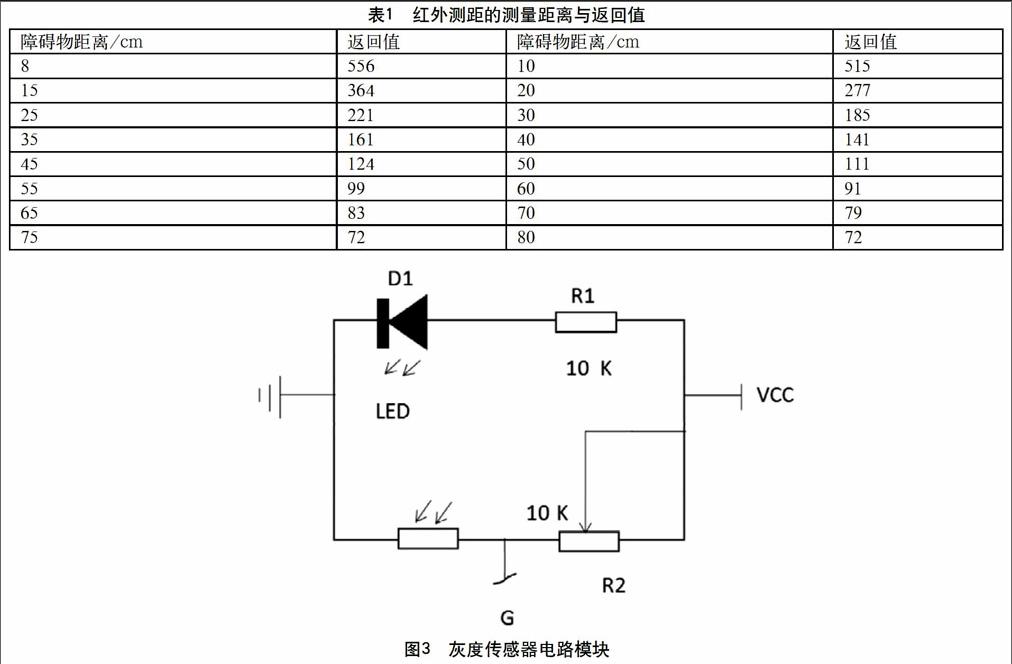
1.2.2 红外测距传感器
GP2D12是该系列传感器的典型,它的输出为:0~2.5 V模拟量(电压值随距离变化);量程范围10~80 cm。这个型号的传感器作为大多数微型移动机器人避碰和漫游测距用传感器都是足够的。原理图与返回值如图2、表1所示。
红外发射器发出一束红外线,红外线遇到目标后被反射回来,反射回来的红外光线被PSD检测器检测到以后,会获得一个偏移值l,利用三角形关系,再知道了发射角度a,偏移距l ,中心矩x,以及滤镜的焦距f以后,传感器到物体的距离D就可以通过几何关系计算出来了。而使用此类传感器要注意2个基本的特点:(1)与障碍物的反射角度基本无关;(2)与反射物体的颜色基本无关。
1.2.3 灰度传感器
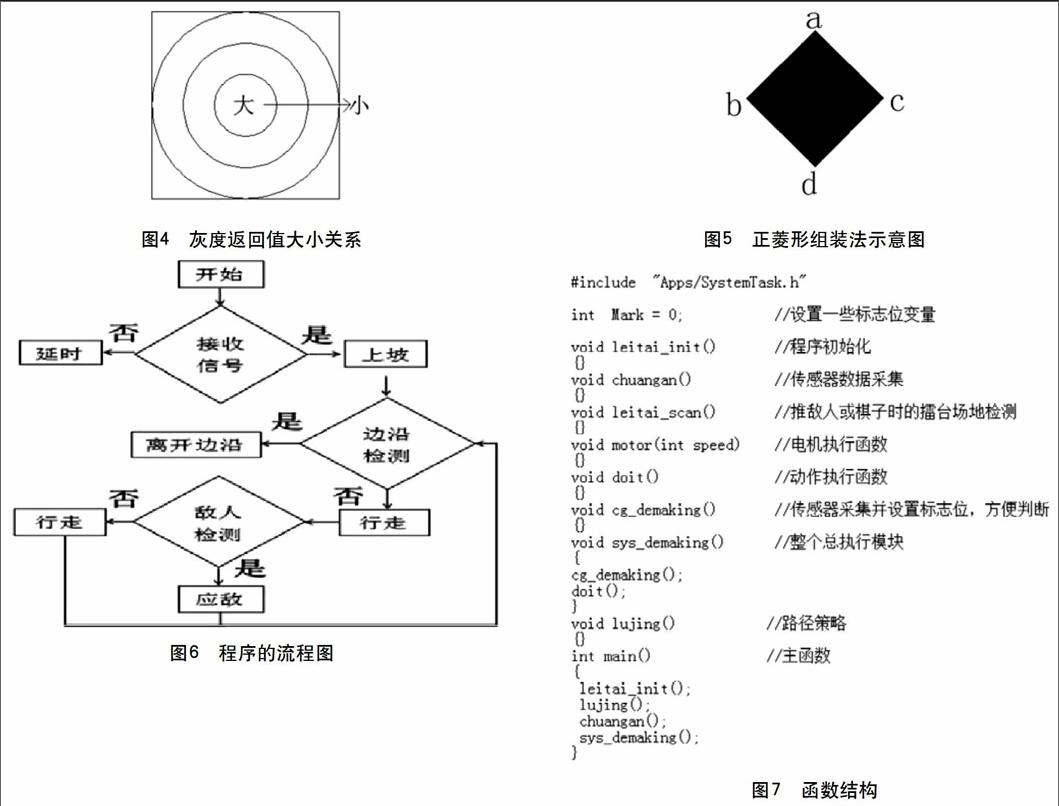
通过自身的亮度白色LED照亮被检测物体反射LED的白光。由于不同的颜色对白光的反射能力不一样,同样材质白色反射度最高,黑色反射度最低。灰度传感器前有一个光敏电阻,用于检测反射光的强弱来推断出被检测物体的灰度值。其电路模块见图3,大小关系见图4。
灰度传感器的使用必须确定好其位置,因为场上的时刻走动意味着灰度值的不断改变,而如何比较准确地计算机器人所在区域是非常关键的。灰度的安装可以采取正菱形装法,见图5。
(以a为机器人正前方)这样的装法可更好地求平均值与趋势,通过求平均值来感知机器人所处的区域,然后更好地处理进攻与防守的策略。通过团队实践得出该运动中机器人所处灰度位置(平均值)(a-100)+b+c+(d-200)>2较为准确,而我们就可以根据不同区域来实现不同的战术。灰度的作用还可以判断其进攻方向是向里还是向外,实践结果得出(a-100)>(d-200)则是向里,反之向外。向里的进攻可以凶猛一些,而向外的进攻就要收敛,避免激烈碰撞所带来的惯性失误。
1.2.4 传感器的选择使用
传感器的合理搭配使用也是取胜的关键。首先,能用IO口连接的不要用AD口的传感器。AD口传感器要先数据接收采集,然后还要将模拟量转化为数字量再输出,所需要的时间太多,会影响机器人的正确判断或者失去进攻的好机会。然而由博创公司出产的12 V控制卡为主板, 采用14.7 MHz嵌入式处理器ATMGA128单片MultiFLEX 控制器IO端口有限,所以并非所有都能使用IO接口的传感器,但是我们要知道孰轻孰重。边缘的检测是保证继续比赛的重中之中,所以检测边缘的传感器使用IO接口的红外接近传感器是最适合的。而在识别是否为敌人或者为棋子的时候,我们可以间插使用。
2 软件的设计
2.1 总体的程序流程
首先我们应该熟读规则,并通过分析程序需要执行的任务、完成的功能来进行软件的设计,主程序进行宏观控制,子程序完善功能,按照流程图编写程序代码。
下面是我们总结的程序流程图,见图6。
这里简要说明一下:因为规则要求是非接触启动机器人,所以采用了红外边沿检测的传感器,一经信号就开始执行程序。特别说明的是边沿检测模块程序应优先级最高,机器人不在擂台上的话,其他任何事物都是空谈,所以这里最好做到每执行完一个模块就执行一次边沿检测的程序或者设置边沿检测为优先級最高中。
2.2 优化于模块化编程
这次的主控芯片是AT mega1280芯片,当我们使用 NorthStar集成开发环境进行编程的时候,我们会发现程序的可读性还有执行效率都非常低。所以推荐如图7所示函数结构进行编程。
创建这些子函数,能够提高可读性,并且提高整个程序的执行效率。相比于NorthStar的集成开发环境,多了不少灵活性,所以鼓励大家多从这个方面书写程序。之后自己也可以尝试加入算法。
2.3 策略的研究
控制策略是机器人进行比赛的灵魂,在以硬件结构为辅助的情况下,运用完美的控制策略,必定使机器人赢得比赛胜利。
首先,在擂台上的行走策略。在经历了比赛之后,认为机器人在擂台上的行走策略可以分为主动的和主静的行走策略。主动的策略主要还是提倡机器人走如图8这种路线,但是尽量改进边沿的处理策略,使其会通过中心“武”的位置。而所谓的主静策略就是机器人根据擂台纸明显的内外、灰度变化的区分,很容易使机器人到达中心位置。然后在中心位置等待“猎物”的出现,一检测到就马上进行攻击,达到出奇制胜的目的。
再进一步的策略改进就是采用灰度传感器的数值辅助判断机器人的位置,并采取一定的动作。而且灰度仅仅只是辅助而已,因为擂台的灰度变化受到的影响因素太多,可能是实验室擂台纸裕比赛时的擂台纸不用,或者是光强的影响等,所以只建议灰度作为辅助的数据判断,不作为主要的判断依据。
在这里也简介一下如果擂台上有队友的机器人的策略。因为武术擂台有一些是标准平台的,没有配备无线模块或者协同通信的模块,所以在擂台上极有可能会出现“自相残杀”的局面。所以建议我方的机器人往“一强一弱”去书写策略。有一辆机器人是进攻的,而另外一辆主要是负责防御还有诱骗敌方机器人,这样子我方的2个机器人才不会出现相争而被敌人夺利的机会。
最后检查整体程序的时序。比如说采样的周期、执行的周期等。力求机器人在擂台上无论是遇到了边沿还是遇到了敌人都能够迅速做出反应,这样子才能更好地占据主动。
3 结语
通过我们参与武术擂台的实践过程中与比赛中所得出的经验和方法,将我们自己的见解从该文展现出来。该文简述了我们自己对武术擂台硬件软件设计与策略研究的见解。武术擂台是一项锻炼自身能力和全面发展的项目,是实现实践与理论相结合的平台,不仅激发了广大学生对机器人的热情,更是开阔视野与培养创新能力的源泉,促进我国机器人技术的发展。
参考文献
[1] 徐俊辉.“创意之星” InnoSTAR实验指导书V2.0.0第二章[Z].
[2] 李炜.机器人擂台赛中隐形设计的可行性分析[J].西安邮电大学学报,2012(S1):19-23.
[3] 龙威林.擂台机器人的设计与制作[J].产业与科技论坛,2014(8):91-92.
[4] 李志凌,周灿,董国刚,等.武术擂台赛无差别组机器人目标搜寻策略[J].微处理机,2013,34(6):63-65.
猜你喜欢
创新作文(1-2年级)(2017年12期)2018-04-17
电脑知识与技术(2016年27期)2016-12-15
中国新通信(2016年16期)2016-10-18
CHIP新电脑(2015年10期)2015-10-15
时代英语·高三(2014年5期)2014-08-26
微型计算机(2009年23期)2009-06-01
电子世界(2004年6期)2004-07-27
