肘关节多运动轴主动位置觉规律研究
2017-05-03 07:08陆峰,李林
中国学校体育(高等教育) 2017年11期
陆 峰,李 林
(中国人民大学体育部,北京 100872)
位置觉测量对评定关节的功能具有重要意义,尤其是肘关节功能的准确评估对于建立功能最大化评估策略非常重要。以往研究绝大部分是关节的单轴位置觉,对于某一关节的位置觉评价往往只是在一个运动轴上[1-4],如用肘关节屈曲的位置觉测试代表肘关节位置觉水平。而人体大部分关节都有多个运动轴,如肘关节由肱尺关节、肱桡关节和桡尺近侧关节包在一个关节囊内构成复关节,关节运动包括绕冠状轴的屈伸和绕垂直轴的旋内和旋外[5]。在日常生活和运动中,人体一般进行的是三维空间里的多轴复合运动[6-8],如单手肩上投篮时,肘关节在做伸动作的同时还在做旋内或旋外的动作进行调整。因此,一个运动轴上的位置觉测试只提供了该关节部分的位置觉信息,很难反映全面的位置觉水平。为了获得肘关节屈曲/伸展轴和旋内/旋外轴的位置觉以及它们之间的相互关系,进行肘关节屈曲/伸展轴和旋内/旋外轴位置觉规律研究。
1 研究对象与方法
1.1 测试对象随机招募60名男生作为本实验的实验对象(年龄:19.7±0.6岁;身高:169.8±3.1cm;体重:64.5±5.8kg),所有受试者要求无主要脏器和运动系统疾病[9],视力正常,优势侧肘关节的关节活动度正常。
1.2 研究方法
1.2.1 文献资料法在Web of Science数据库中输入关键词“elbow”“joint position sensation”“proprioception”等,检索2001-2017年期间相关文献110篇,为本研究提供了重要的理论支撑。
1.2.2 测试法自2016年3月1日至2016年3月3日每天上午8点至11点、下午14点至17点进行测试,受试者只进行优势侧肘关节测试,抛球实验确定优势侧。一周后重新进行重测实验用以检测重测信度,2个阶段测试要求完全一样。测试受试者优势侧肘关节活动度及屈曲/伸展轴、旋内/旋外轴主动-主动位置觉。
位置觉测试采用主动-主动开链关节角度重置法[10]:受试者坐姿位,躯干和优势侧上臂通过绑带与测试椅固定。惯性姿态测试设备通过双面胶固定在优势侧前臂近腕关节处,手指和手腕放松无固定。上肢与眼睛之间以厚黑布隔开,避免受试者看到测试上肢。

自制惯性姿态测试系统在测量主动位置觉时的信度通过对间隔一周的前后2次测试的评定结果进行组内相关系数(intraclass correlation coefficient,ICC)[16-19]和配对t检验(a paired t-test)[20]来检验。肘关节各运动轴、各关节活动范围的位置觉之间的相互关系采用Pearson相关系数。
惯性姿态传感器是新一代运动分析系统,已被应用于测量关节三维本体感觉的研究中。自制惯性姿态传感器通过卡尔曼滤波法融合三轴加速度、三轴角速度和三轴磁力值数据,获得测试关节远端环节的精确姿态数据[21-25]。将受试者测试关节的近端环节固定,惯性姿态传感器通过绑带固定在测试关节的远端环节上。惯性姿态传感器在受试者测试关节的远端环节运动过程中随其做相同的运动,并记录下实时变化的三维角度值,即关节角度值。三维姿态被定义为惯性姿态传感器自身坐标系S与地球固定坐标系G之间的定位,使用与地球固定坐标系G作为参考坐标系,遵循笛卡尔右手定则[26],如图1所示。一些应用惯性姿态传感器进行的研究,表现出了良好的信效度[16,26-28]。

表1 肘关节活动度测试重测信度(°)Table 1 Test retest reliability result of the elbew ROM test(°)

表2 肘关节位置觉测试重测信度(°)Table 2 Test retest reliability result of the elbew joint position sense(JPS) test(°)
本研究中应用的惯性姿态传感器体积小(38mm×53mm×21mm)、重量轻(50g),通过蓝牙与电脑连接,采样频率为100 Hz。基于此传感器,我们开发了一套测量肘关节各运动轴位置觉的软件[26,29]。
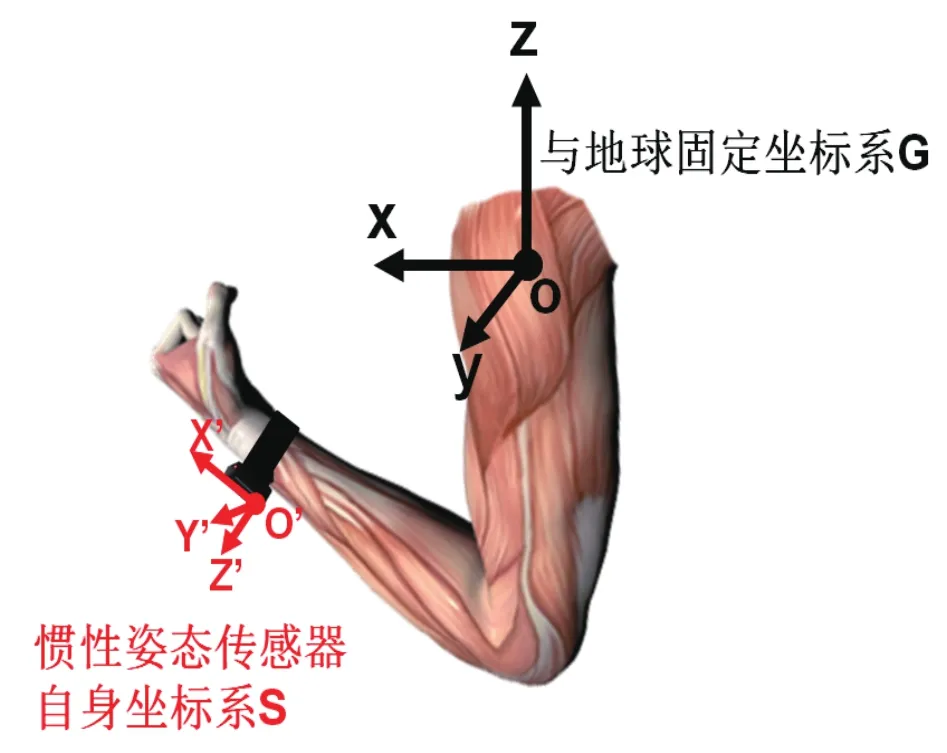
图1 惯性姿态传感器Figure1 inertial and magnetic measurement systems
1.2.3 数理统计法利用SPSS20.0统计软件对测试指标进行统计学分析,所有测试指标均以平均值±标准差的形式表示。
2 结 果
2.1 重测信度如表1所示,肘关节活动度测试具有较高的重测信度(ICC范围0.79-0.80,p<0.05)。day1、day2分别代表间隔一周的前后2次测试。
如表2所示,肘关节位置觉测试具有较高的重测信度(ICC范围0.75-0.88,p<0.05)。
2.2 肘关节活动度对第1阶段测试的数据进行后续分析。肘关节活动度如表3所示。

表 3 肘关节活动度(°)Table 3 ROM of elbew(°)
2.3 肘关节主动位置觉
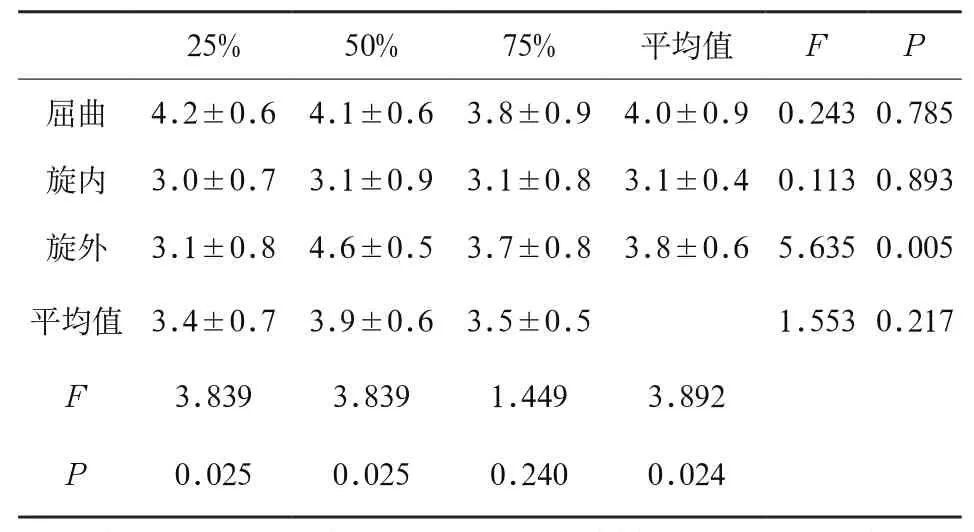
表4 肘关节位置觉(°)Table 4 JPS of elbew(°)
如表4所示,对肘关节某一运动轴不同关节活动范围位置觉之间进行单因素方差分析,肘关节旋外不同关节活动范围位置觉之间差异具有显著性(P=0.005)。事后检验采用Tukey’s post hoc方法,25%ROM和50%ROM位置觉之间差异具有显著性(P=0.013)。肘关节屈曲、旋内不同关节活动范围主动位置觉之间差异不具有显著性(P=0.785,P=0.893)。以肘关节某一关节活动范围各运动轴位置觉平均值代表该关节活动范围的位置觉,肘关节不同关节活动范围位置觉之间差异不具有显著性(P=0.217)。
对肘关节某一关节活动范围各运动轴位置觉之间进行单因素方差分析,25%ROM时,肘关节各运动轴主动位置觉之间差异具有显著性(P=0.025)。事后检验采用Tukey’s post hoc方法,屈曲和旋内位置觉之间差异具有显著性(P=0.023)。50%ROM时, 肘关节各运动轴主动位置觉之间差异具有显著性(P=0.025)。事后检验采用Tukey’s post hoc方法,旋内和旋外位置觉之间差异具有显著性(P=0.021)。75%ROM时,肘关节各运动轴位置觉之间差异不具有显著性(P=0.240)。以肘关节某一运动轴不同关节活动范围主动位置觉的平均值代表该运动轴的位置觉,肘关节各运动轴主动位置觉之间差异具有显著性(P=0.024)。事后检验采用Tukey’s post hoc方法,旋内和屈曲位置觉之间差异具有显著性(P=0.030),旋内和旋外位置觉之间差异具有显著性(P=0.021),旋内(3.1±0.4°)主动位置觉好于旋外(3.8±0.6°)和屈曲(4.0±0.9°)。
表5 25%ROM各运动轴向主动位置觉之间的相关性
Table 5 Correlation between JPS in different directions of 25%ROM
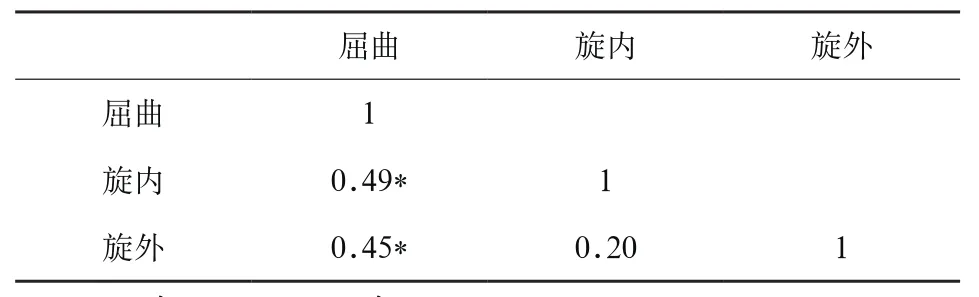
注:**代表p <0.01;*代表p <0.05。
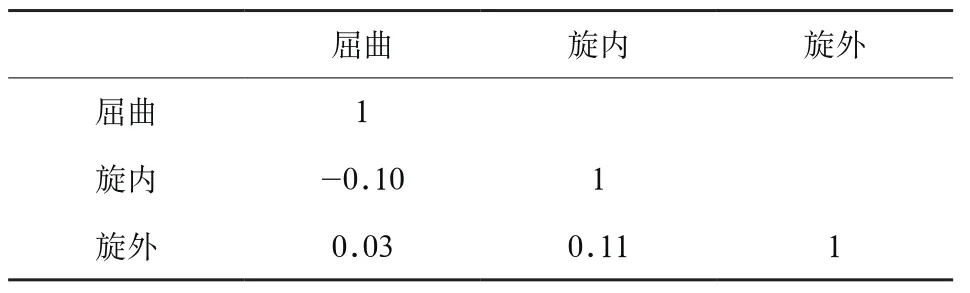
表6 50%ROM各运动轴向主动位置觉之间相的关性Table 6 Correlation between JPS in different directions of 50%ROM
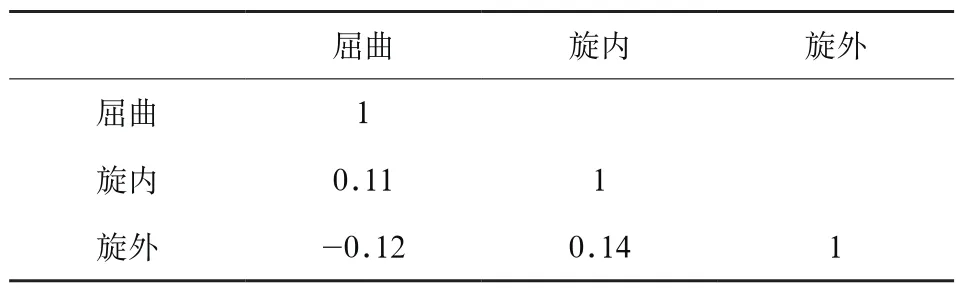
表7 75%ROM各运动轴向主动位置觉之间相关性Table 7 Correlation between JPS in different directions of 75%ROM
如表5~7所示,25%ROM时,屈曲与旋内、屈曲与旋外主动位置觉之间具有显著性相关。50%ROM和75%ROM时,各运动轴主动位置觉之间不具有显著性相关。
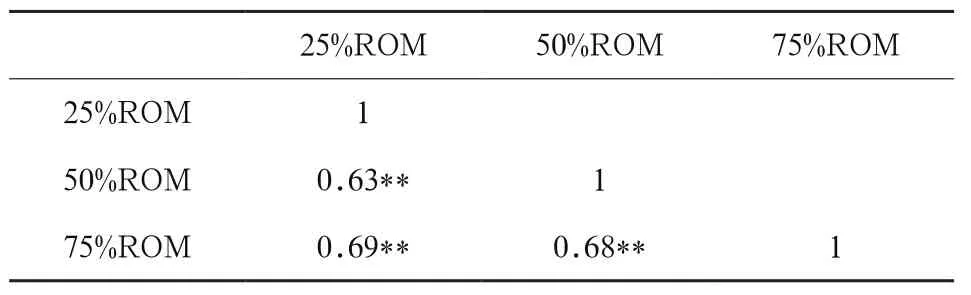
表8 屈曲各关节活动度主动位置觉之间的相关性Table 8 Correlation between JPS in different angular levels of flexion
如表8~10所示,屈曲各关节活动度主动位置觉之间具有显著性相关;旋外25%ROM和50%ROM之间主动位置觉之间具有显著性相关;旋内各关节活动度主动位置觉之间不具有显著性相关。
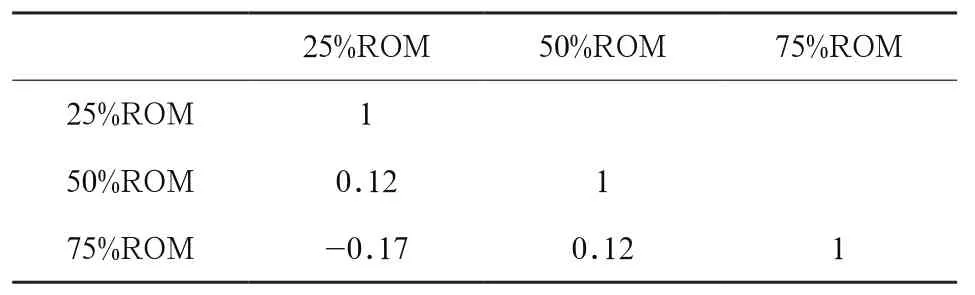
表9 旋内各关节活动度主动位置觉之间的相关性Table 9 Correlation between JPS in different angular levels of internal rotation
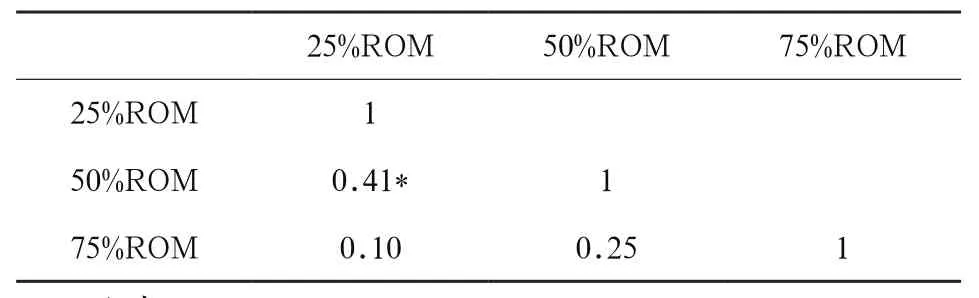
表10 旋外各关节活动度主动位置觉之间的相关性Table 10 Correlation between JPS in different angular levels of extorsion
3 讨 论
肘关节除25%ROM和50%ROM旋外位置觉之间差异具有显著性,其它运动轴(屈曲、旋内)不同关节活动范围主动位置觉之间差异不具有显著性。对于同一运动轴运动时,虽然关节活动范围不同,但收缩的肌肉和激活的本体感受器基本相同。因此,不同关节活动范围对肘关节主动位置觉影响较小。
由于肘关节的结构差异,不同运动轴肌肉质量以及感受器的密度和分布不同[30]。肘关节免疫组织化学研究揭示,在背-桡骨韧带中分布的机械感受器有着很高的密度,而长的放射状的韧带几乎没有机械感受器。在横截面积较大的肌肉中,肌梭数量较多[31-32]。肘关节不同运动轴主动位置觉之间差异具有显著性,不同运动方向对肘关节主动位置觉会产生影响,这可能是由于在不同运动轴运动时,所收缩的肌肉、牵拉的韧带和激活的本体感受器不同造成的。其中旋内(3.1±0.4°)主动位置觉好于旋外(3.8±0.6°)和屈曲(4.0±0.9°)。
以往研究绝大部分是关节的单轴位置觉,对于某一关节的位置觉评价往往只是在一个运动轴上,如用肘关节屈曲的位置觉测试代表肘关节位置觉水平。而本研究中,25%ROM时,个别方向主动位置觉之间具有显著性相关(p<0.05);50%ROM和75%ROM时,各方向主动位置觉之间不具有显著性相关(P>0.05)。因此,一个运动轴上的位置觉测试只提供了该关节部分的位置觉信息,很难反映全面的位置觉水平,不能通过某一运动轴上的位置觉代表肘关节的位置觉。
4 结 论
1)不同关节活动范围对肘关节主动位置觉的影响较小。
2)不同运动方向对肘关节主动位置觉会产生影响,其中旋内主动位置觉好于旋外和屈曲。
3)不能通过某一运动轴上的位置觉代表肘关节的位置觉。
参考文献:
大多数的女性农民工在城市生活的环境较差,周围缺少良好的体育锻炼场所,不能满足她们在体育锻炼方面的需求。这样直接导致她们体育锻炼热情降低,进而造成了体育锻炼缺少规律,不能坚持。
[1] Zheng T, Huo M, Maruyama H, et al. Effects on ROM and joint position sense of the neck of two different interventions[J]. J Phys Ther Sci, 2015,27(4): 1041-1043.
[2] Zaina F, Negrini S. Letter to the editor concerning: "reliability and validity of nonradiographic methods of thoracic kyphosis measurement: a systematic Areview." by Barrett E, McCreesh K, Lewis J. Man Ther. 2014 Feb;19(1):10-7[J]. Man Ther, 2015, 20(2): e5.
[3] Yu J S, An D H. Differences in lumbar and pelvic angles and gluteal pressure in different sitting postures[J]. J Phys Ther Sci, 2015, 27(5): 1333-1335.
[4] 李林,纪仲秋,李艳霞,等.关节角度重置法、运动最小阈值测量法和力量重现法的相关性研究[J]. 天津体育学院学报, 2016, 31(1): 36-40.
[5] 郑和平,徐达传.肘关节的解剖结构与常用手术入路[J].中华关节外科杂志 , 2008, 2(3): 50-52.
[6] Suehiro T, Mizutani M, Ishida H, et al. Effect of abduction and external rotation of the hip joint on muscle onset time during prone hip extension with knee flexion[J].J Phys Ther Sci, 2015, 27(1): 289-291.
[7] Borstad J D, Dashottar A, Stoughton T. Validity and reliability of the Low Flexion measurement for posterior glenohumeral joint capsule tightness[J].Manual Therapy,2015,20(6):875-8., 2015.
[8] Park Y, Bae Y. Change of range of motion of the temporomandibular joint after correction of mild scoliosis[J]. J Phys Ther Sci, 2014, 26(8): 1157-1160.
[10] Smith T O, Davies L, Hing C B. A systematic review to determine the reliability of knee joint position sense assessment measures[J]. Knee, 2013,20(3): 162-169.
[11] Baray A L, Philippot R, Farizon F, et al.Assessment of joint position sense deficit, muscular impairment and postural disorder following hemi-Castaing ankle ligamentoplasty[J]. Orthop Traumatol Surg Res, 2014, 100(6 Suppl): S271-274.
[12] Bang D H, Shin W S,Choi S J, et al. Comparison of the effect of weight-bearing and non-weightbearing positions on knee position sense in patients with chronic stroke[J]. J Phys Ther Sci,2015, 27(4): 1203-1206.
[13] Duzgun I, Kanbur N O, Baltaci G, et al. Effect of Tanner stage on proprioception accuracy[J]. J Foot Ankle Surg, 2011, 50(1): 11-15.
[14] Vila-Cha C, Riis S, Lund D, et al. Effect of unaccustomed eccentric exercise on proprioception of the knee in weight and non-weight bearing tasks[J]. J Electromyogr Kinesiol, 2011, 21(1): 141-147.
[15] Han J T, Lee J H. Effects of kinesiology taping on repositioning error of the knee joint after quadriceps muscle fatigue[J]. J Phys Ther Sci,2014, 26(6): 921-923.
[16] Marini F, Squeri V, Morasso P, et al. Robot-aided developmental assessment of wrist proprioception in children[J]. J Neuroeng Rehabil, 2017, 14(1): 3.[17] Drouin J M, Valovich-Mcleod T C, Shultz S J, et al. Reliability and validity of the Biodex system 3 pro isokinetic dynamometer velocity, torque and position measurements[J]. Eur J Appl Physiol,2004, 91(1): 22-29.
[18] You S H. Joint position sense in elderly fallers:a preliminary investigation of the validity and reliability of the SENSERite measure[J]. Arch Phys Med Rehabil, 2005, 86(2): 346-352.
[19] Shrout P E, Fleiss J L. Intraclass correlations:uses in assessing rater reliability[J]. Psychol Bull,1979, 86(2): 420-428.
[20] Anderson V B, Wee E. Impaired joint proprioception at higher shoulder elevations in chronic rotator cuff pathology[J].Arch Phys Med Rehabil, 2011, 92(7):1146-1151.
[21] Van Andel C J, Wolterbeek N, Doorenbosch C A,et al. Complete 3D kinematics of upper extremity functional tasks[J]. Gait Posture, 2008, 27(1): 120-127.
[22] Karduna A R, Mcclure P W, Michener L A, et al. Dynamic measurements of three-dimensional scapular kinematics: a validation study[J]. J Biomech Eng, 2001, 123(2): 184-190.
[23] Picerno P, Cereatti A,Cappozzo A.Joint kinematics estimate using wearable inertial and magnetic sensing modules[J]. Gait Posture, 2008, 28(4): 588-595.
[24] O`donovan K J, Kamnik R, O`keeffe D T, et al.An inertial and magnetic sensor based technique for joint angle measurement[J]. J Biomech, 2007,40(12): 2604-2611.
[25] Favre J, Aissaoui R, Jolles B M, et al. Functional calibration procedure for 3D knee joint angle description using inertial sensors[J]. J Biomech,2009, 42(14): 2330-2335.
[26] Cutti A G,Giovanardi A,Rocchi L,et al. Ambulatory measurement of shoulder and elbow kinematics through inertial and magnetic sensors[J]. Med Biol Eng Comput, 2008,46(2): 169-178.
[27] Parel I, Cutti A G, Fiumana G, et al. Ambulatory measurement of the scapulohumeral rhythm:intra- and inter-operator agreement of a protocol based on inertial and magnetic sensors[J]. Gait Posture, 2012,35(4): 636-640.
[28] Van Den Noort J C, Wiertsema S H, Hekman K M, et al. Reliability and precision of 3D wireless measurement of scapular kinematics[J].Med Biol Eng Comput, 2014,52(11): 921-931.
[29] Cappello L, Elangovan N, Contu S, et al. Robotaided assessment of wrist proprioception[J]. Front Hum Neurosci, 2015,9:198.
[30] Weiler H T,Awiszus F.Differences between motiondirection perception and unspecific motion perception in the human knee joint[J]. Exp Brain Res, 2000, 132(4): 523-530.
[31] Banks R W.An allometric analysis of the number of muscle spindles in mammalian skeletal muscles[J]. J Anat, 2006, 208(6): 753-768.
[32] Kokkorogiannis T. Somatic and intramuscular distribution of muscle spindles and their relation to muscular angiotypes[J]. J Theor Biol, 2004,229(2): 263-280.
猜你喜欢
临床骨科杂志(2022年3期)2022-11-24
保健与生活(2022年13期)2022-07-06
阅读(低年级)(2022年6期)2022-06-17
中华养生保健(2022年10期)2022-05-23
昆明医科大学学报(2022年2期)2022-03-29
宇航总体技术(2021年6期)2021-12-15
康颐(2021年16期)2021-10-15
舰船科学技术(2021年12期)2021-03-29
运动精品(2020年11期)2020-11-22
中国实用医药(2016年14期)2016-05-20