
HDR-I技术应用于光环境性能实测的方法
2017-05-02 05:33:48孙澄,刘蕾,孔哲
照明工程学报 2017年2期
孙 澄,刘 蕾,孔 哲
(1.哈尔滨工业大学建筑学院,黑龙江省寒地建筑科学重点实验室,黑龙江 哈尔滨 150001; 2.University of Wisconsin-Milwaukee, Milwaukee, WI 53201,USA)
HDR-I技术应用于光环境性能实测的方法
孙 澄1,刘 蕾1,孔 哲2
(1.哈尔滨工业大学建筑学院,黑龙江省寒地建筑科学重点实验室,黑龙江 哈尔滨 150001; 2.University of Wisconsin-Milwaukee, Milwaukee, WI 53201,USA)
本文研究HDR-I技术用于光环境性能实测的方法流程。通过多曝光时间场景图像的获取、相机亮度反应函数的确定、HDR-I合成、相机刻度校准以及镜头渐晕校准的五步骤技术流程,实现了HDR-I的准确合成,并在合成图片的基础上,利用HDR Scope软件对光环境性能进行分析。解决了光环境动态模拟软件计算时间长,所需环境信息多以及与实际误差大等问题,为光环境实测、评价及软件修正提供技术支持。
HDR-I;光环境性能;实测;技术流程
引言
随着绿色建筑理念的普及和现代建筑理论的发展,自然采光在建筑设计中的重要性愈加彰显,这对光环境性能的实测及评价提出了更高的要求,快捷、准确地实测光环境性能这一问题亟待解决。本文在Malika 和Debevec关于HDR-I技术合成误差的研究基础上,提出HDR-I技术用于光环境性能实测的方法,确定HDR图片的获取及合成流程,为建筑自然采光设计提供一种便捷可靠的实用工具。
1 HDR-I概念及优势
1) HDR-I概念。HDR-I是High-Dynamic Range image的英文缩写,本文译作高动态范围图像。所谓动态范围,是数码图像中记录的最亮值与最暗值的相对比值。动态范围代表了数码图像所能记录的 “最亮”到“最暗”之间亮度等级数。计算公式如下:
(1)
式中RDynamic为动态范围,Imax为最大光信号强度值,Imin为最小光信号强度值。比值的大小表示动态范围的大小。比值越大,动态范围越大,显示的亮度级别就越多,包含的场景亮度信息越多。 高动态范围就是从“最亮”到“最暗”之间的亮度等级多,能显示丰富的层次。为了达到提高图像动态范围的目的,学者们通过研究采取了以下两种方法:一是增加存储数据宽度(16 bit、32 bit 等)以提高像素数据的精度;二是采用浮点值存储图像数据,大大提高图像所能存储的数据量。
一直以来,HDR-I在计算机图形学中频繁应用,起到了重要作用。 HDR-I技术相比于传统图像技术,在图像建模、绘制、拼接以及图像处理(例如运动模糊)等领域有着巨大的优势。传统图像只能使用256个亮度级别来区分表示, 而实际自然场景中动态范围高达100 000 000∶1[1], 这就意味着传统图像中有很多信息丢失;与传统图像不同,HDR-I用浮点数来表示像素值,可以将自然场景中的动态范围全部信息表示出来。HDR-I像素值与实际场景亮度值是线性映射的关系,且许多图像处理算法中假定像素值和实际亮度值呈线性关系[2],这为HDR-I后期数据处理带来极大方便。
2)HDR-I的获取方法。HDR-I的获取方法主要有三类: 人工合成法,将模拟光线和基于物理光照模型的合成图像[3], 早期HDR图像的来源主要是这一类;多次曝光法,用多张不同曝光度的普通图像计算实际亮度,得到HDR图像;图像传感器捕获法,使用专用设备来直接拍摄HDR 图像[4-5]。
第一类方法中都是人工合成的图像, 不能处理自然图像;第三类方法需要特殊的设备;第二类只需普通相机拍摄几张不同曝光度的图像就可以得到HDR图像,其原理为采用较短的曝光时间获取场景亮区的细节,较长的曝光时间获取场景暗区的细节;通过合理的分布多张图像的曝光时间,涵盖整个真实场景的所有亮度信息, 因此具有较好的应用价值。 为解决多次曝光法的合成误差,Malika和Debevec提出改进方法,在精确知道连续8~10张图像曝光度的情况下,解决了当迭代约束条件精度设置较高时有可能出现的发散情况,校正了当曝光度比的预期值偏离正确值较大时会收敛到错误结果的问题[6]。对比验证结果表明, 测试中使用的全部图像都能顺利收敛,从而得到最优解。

表1 三种高动态范围图像获取方式的比较Table 1 Comparison of three HDR-I capture methods
3)HDR-I技术的使用性能:目前国际上对光环境的测试方法主要有两种,一种是传统方法:使用光度、亮度仪器进行测试,获取光环境参数;另一种即HDR-I技术:利用数码相机拍摄光环境场景,根据数码相机成像及其他光学原理获取光环境参数。两种方法的比较见表2。通过表2对比可知,对大多数光环境性能实测,HDR-I技术优于传统测试方法。
2 HDR-技术设备选用
所选设备(如图1所示)包括:相机,Canon EOS 5D Mark II;镜头Sigma 8 mmf/3.5 Fisheye Lens;三脚架,Benro A1580F Tripod;对照灰卡,18% Grey Card。使用相机和鱼眼镜头连续拍摄,将光圈固定在5.6的位置,改变快门的速度,连续拍摄10~13张,以取得不同曝光程度的照片,同时用测光仪器测试景框中的灰卡亮度并记录,留作软件矫正使用。
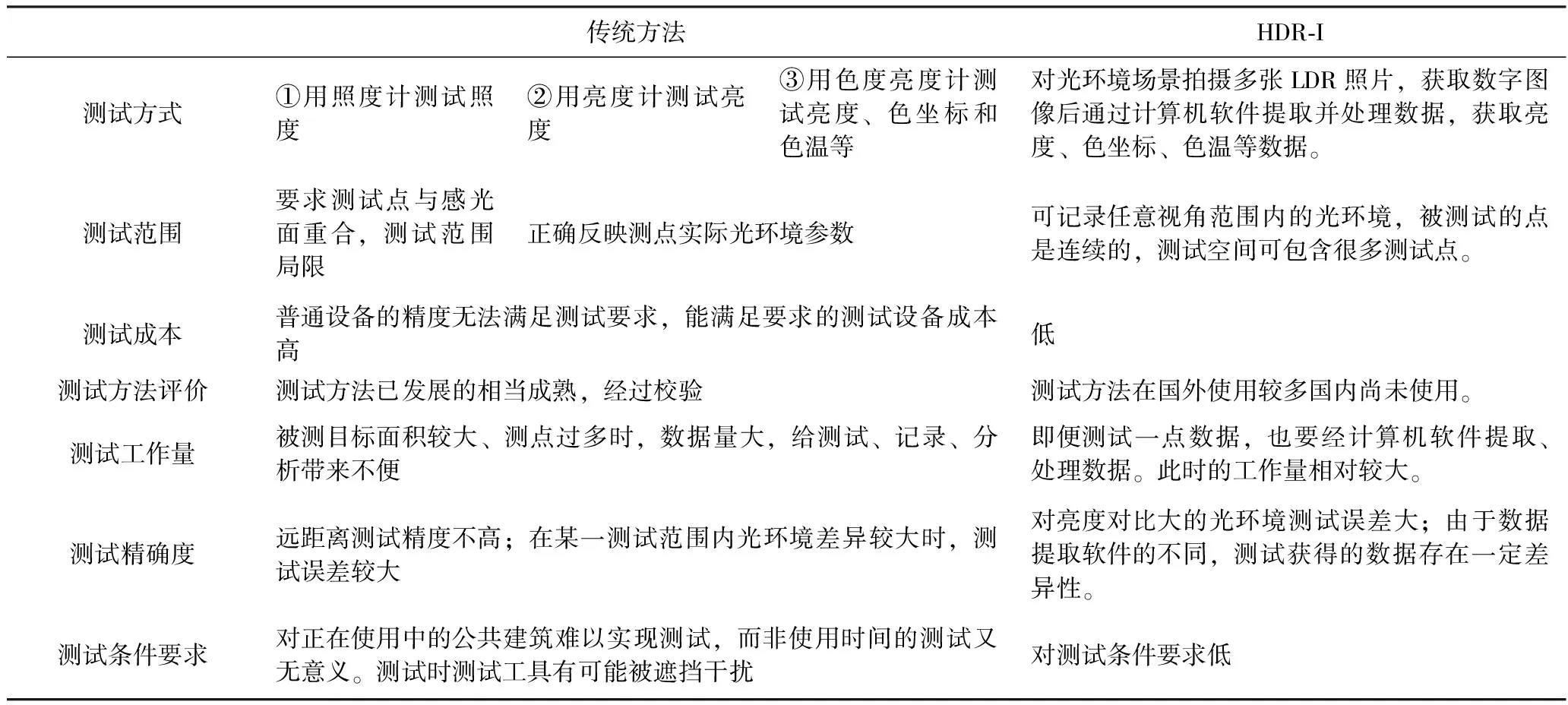
表2 传统测试方法与HDR-I技术对比表Table 2 Comparison of traditional and HDR-I measurement methods

图1 拍摄高动态范围图像所选设备Fig.1 Equipment for capturing HDR-I
1)相机选择。市场上的数码相机可以分为卡片相机、微单/单电、单反相机等几大类。卡片相机手动功能及镜头性能相对较差且无法更换镜头。为保证测试的精度,选择更恰当的镜头,选用微单/单电、单反相机。单反相机分辨率都很高,相机有多种感光度,可以拍摄各种场景;光圈和焦距都有较大可选范围,因此可拍摄的环境亮度、视野和距离较大,可以满足测试要求。在本研究中,选用Canon EOS 5D Mark II作为测试设备。
2)镜头选择。比较鱼眼镜头视野与人眼视野可发现,鱼眼镜头的视野可以含纳该角度下的人眼视野范围及敏感区域,采集到的环境信息较多,免去了多次拍摄的麻烦,避免合成中的误差,故本研究使用Sigma 8 mmf/3.5 Fish eye Lens进行HDR-I的拍摄。
3)合成软件选择。选用高动态范围图像的合成软件PhotoSphere,该软件由Greg Ward 编写,支持HDR-I 格式,有先进的伪彩图映射操作。将多张不同曝光度的LDR-I合成为一张HDR-I的功能简单、精确。在 PhotoSphere 中,选择适当的像素值,就能制作出保留完整光环境信息的 HDR 图像;且可生成伪彩图映射。在比较了目前常见软件的可操作性和功能后,选用 PhotoSphere 作为合成软件。
3 HDR-I合成技术流程
HDR-I技术应用流程可细分为五步: 多曝光时间场景图像的获取、相机亮度反应函数的确定、HDR 图像合成、相机刻度校准以及镜头渐晕校准。
3.1 多曝光时间场景LDR图像的获取
LDR是Low-Dynamic Range 的英文缩写,本文译作低动态范围,多曝光时间场景图像即指拍摄多张不同曝光度的图片,具体的照片张数,可以通过数码相机调整不同的曝光量,采集场景图像来确定,尽量完整的反映待实测光环境的各个细节。这样得到的照片即原始的LDR 图像,通过合理的分布各图像的曝光时间,即可涵盖整个场景的光环境信息。本文按此方法连续拍摄的10张LDR-I见图2,这些图片涵盖了由最亮到最暗的场景全部信息。
对于该技术应用的准确性,MN Inanici 曾将同场景HDR图像与物理测试作过比较,他采用Nikon CoolPix 5400 和FC-E9 鱼眼镜头获得LHR图像,通过Photosphere软件合成HDR 图像,其亮度数值与物理测试数值的误差在全阴天条件下为5.8%,自然光条件下为7.2%。
由于相机对不同程度色彩的反应不同,不同的光源条件会影响HDR的亮度数值。MN Inanici对处于自然光条件及其他不同光源条件下的485个实测点进行点对点数据比较,统计得出的亮度误差率平均值为7.3%[7],该研究证明:只要操作正确,HDR-I技术误差非常小。

图2 HDR-I原始多曝光时间LDR 图像的采集Fig.2 Multiple LDR photographs(fixed aperture, varying shutter speed)
3.2 相机亮度响应函数的确定
在相机拍摄的图像中,像素亮度与实际亮度并非线性对应关系,相机亮度响应曲线可将相机拍摄的数字图像的像素亮度恢复到场景中实际点亮度。确定相机亮度响应曲线的方法是:拍摄一组曝光量变化范围较大的照片,将其导入Photosphere 软件中即可得到“亮度响应曲线”,该曲线可以按以下路径查找:MYMHOME/Library/Preferences/Photosphere。不同型号相机对亮度的响应不同,相机亮度响应函数不同,更换相机应重新确定相机亮度响应曲线。

图3 Canon EOS 5D Mark II相机亮度响应函数Fig.3 Camera response curve for Canon EVS 5D Mark Ⅱ
3.3 HDR图片的合成
在基于MAC系统的Photosphere软件中导入拍摄的10张LDR图像,并叠加所使用相机的亮度响应函数即可生成HDR图像。图4是经合成得到的HDR-I。

图4 合成得到的HDR-IFig.4 HDR-I from assemble
3.4 相机刻度校准
首先相机光孔是通过镜头里的光圈来调节大小的,光圈值通过光圈拨杆或触点传给机身,其构造是有限次的完全重复性,因此每次采集图像时的实际光孔大小会略有不同,并因此带来一定的误差。另外,相对相机上表示的快门速度与真实曝光时间也存在一定误差,例如1/500 s的快门速度,在Canon EOS 5D II 上为1/531 s。这些误差加在一起使得相机的曝光量并不完全准确。HDR-I 技术所涉及的图像曝光量来自相机显示的参数,因此其像素亮度在叠加了亮度反应曲线之后,仅是调整了相机感光装置在整体线性上的误差,而无法改变HDR 图像单个像素亮度的准确性。这就要求我们采用实际的亮度测试仪进行同位置点校正,像素亮度与实际亮度的比值也被称为刻度校准系数(calibration factor),可使用相机生产厂家提供的刻度校准软件或数据进行校准。
3.5 镜头校准
sigma鱼眼镜头产生图像采用的是等距投影的原理,等距鱼眼镜头会表现出明显的由中心轴发散的像素渐晕效果(如图5所示),因此为了得到准确的亮度分布,等距鱼眼镜头渐晕效果校准是必要的。由于每个镜头的渐晕函数是确定的。可按如下方法校准:首先,在没有自然采光的情况下,使用恒定电气照明,以目标灰卡为对象,拍摄多曝光时间场景图像,经软件合成HDR-I。相机每次旋转5度,直至覆盖全部视角(如图6所示)每次拍摄都会得到一张HDR-I以及目标灰卡的亮度;然后,将灰卡的亮度值输入Radiance工具箱 pcomb 中,查找渐晕函数,并将其输入Photosphere中,以校正该镜头拍摄的HDR-I。图7为光圈大小为f/3.5的sigma鱼眼镜头的渐晕函数校准,图中红色为校正后。其渐晕函数为
y=-1.871 3x6-10-10X5+1.507 2X4+
9×10-9X3-2.486 8X2-3×10-8X+20.656
(2)

图5 渐晕效果示意图Fig.5 Diagram of vignetting effect

图6 以灰板为对象,以5度为增幅的HDR图像Fig.6 HDR images with a 5 degree increase, and gray board as the object
至此,HDR-I的拍摄、合成及校准工作全部完成,HDR-I技术应用于光环境性能实测流程见图8,光环境照度伪彩图见图9。
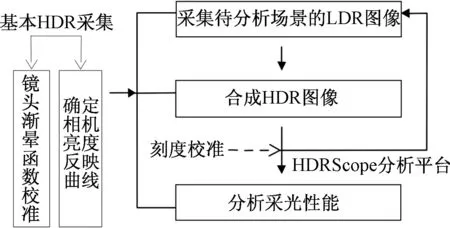
图8 HDR-I技术应用于光环境性能实测流程图Fig.8 Procedure of applying HDR-I technology in daylighting analysis
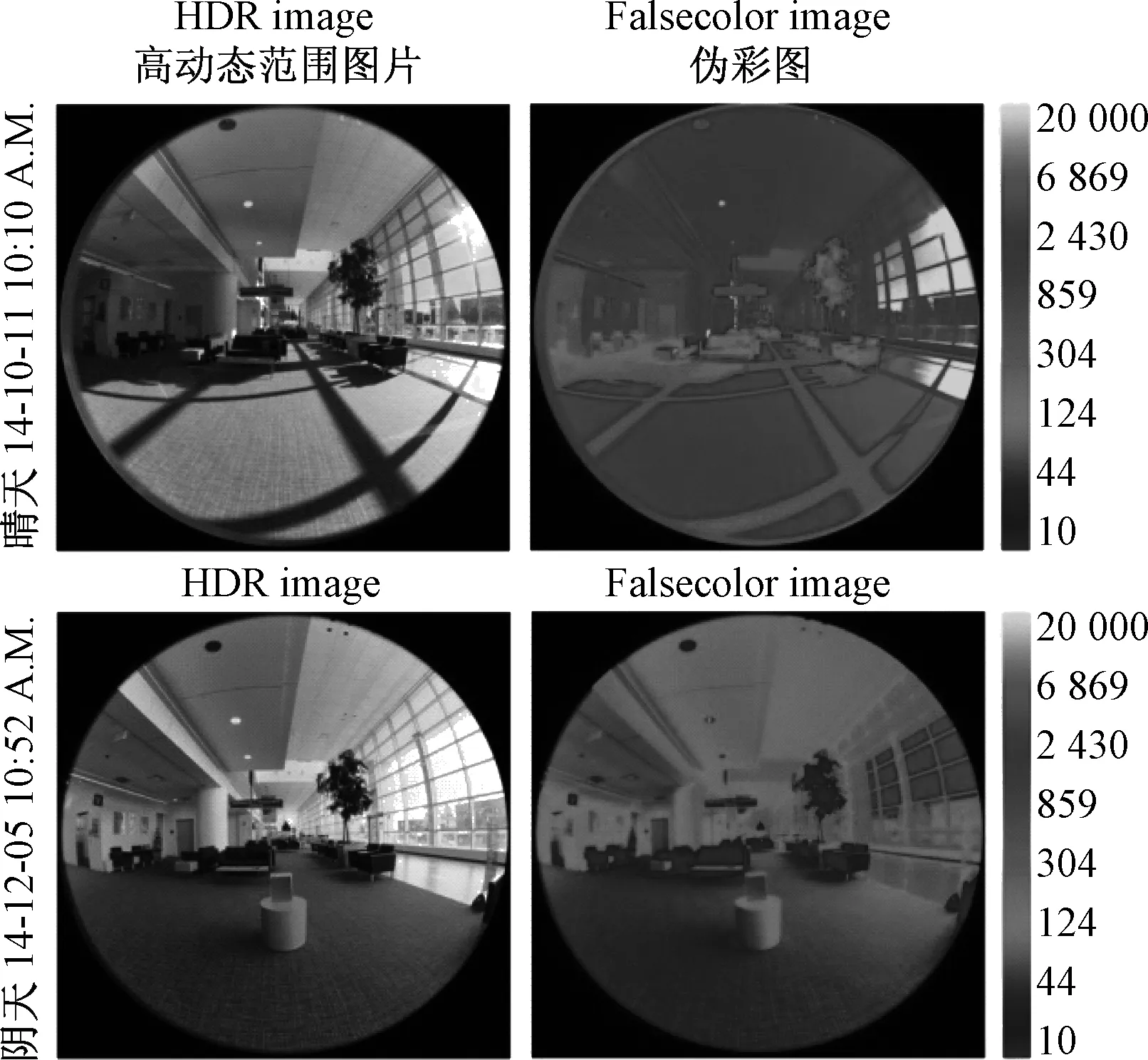
图9 应用HDR-I技术分析室内光环境照度Fig.9 Application of HPR-I technology to analyze induor illumination
4 结语
本文从HDR-I技术的图片获取方式、合成技术流程、文件格式、相机及镜头选择、高动态范围图像合成软件等方面进行详细探讨,总结HDR-I技术应用于光环境性能实测的具体方法流程。
根据研究对象的光环境特点,比较分时曝光和同时曝光两种获取高动态范围图像方法的区别,综合考虑其便利性及成本,选择多次曝光法作为本研究中HDR图片的获取方法;根据Malika的研究确定了通过多曝光时间场景图像的获取、相机亮度反应函数的确定、HDR-I合成、相机刻度校准以及镜头渐晕校准的五步骤技术流程;为研究选择了获取低动态范围图像的相机(佳能 EOS 5D II)及鱼眼镜头(Sigma 8 mmf/3.5 Fisheye Lens)确定采用 PhotoSphere 作为HDR-I的合成软件。所得到的HDR图片可利用HDR Scope软件进行场景的照度伪彩图、眩光等一系列光环境性能的实测分析。
[1] DEVLIN K. A review of tone reproduction techniques. Department of Computer Science. University of Bristol, 2002.
[2] MITSUNAGA T, NAYAR S K. Radiometric self calibration[C]//Proceedings of IE EE Conference on Computer Vision and Pattern Recognition, Fort Collins. 1999:374-380.
[3] DEBEVEC P E, MALIK J. Recovering high dynamic range radiance maps from photographs[C]//Proceedings of the ACM SIGG RAPH97,Los Angeles. 1997: 369-378.
[4] AGGARWAL M, AHUJA N. Split aperture imaging f or high dynamic range[C]//Proceedings of IEEE ICCV, Vancouver, Canada. 2001, II:10-17.
[5] NAYAR S K, MITSUNAGA T. High dynamic range imaging; Spatially varying pixel exposures[C]//Proceeding s of IEE ECVPR, Hilt on Head Island, South Carolina. 2000: 472-479.
[6] DEBEVEC P, MALIK J. Recovering high dynamic range radiance maps from photographs[C]//Proceedings of the 24th Annual Conference on Computer Graphics and Interactive Techniques.
[7] INANICI MN. Evaluation of High Dynamic Range Photography as a Luminance Data Acquisition System[J].Lighting Res. Tech, 2006,38 (2): 123-136.
The Application of HDR-I Technology in Reflecting and Recording the Daylighting Performance
SUN Cheng1, LIU Lei1, KONG Zhe2
(1.SchoolofArchitecture,HarbinInstituteofTechnology;HeilongjiangColdRegionArchitecturalScienceKeyLaboratory,Harbin150001,China;2.UniversityofWisconsin-Milwaukee,Milwaukee,WI53201,USA)
The HDR-I technology is used to reflect and record the daylighting performance of real environment. The five steps of the technical procedure are as follows: The exposure time of scene image acquisition, camera brightness response function determination, camera calibration, HDR-I synthesis and lens vignetting calibration. This paper realize the accurate synthesis of HDR-I, and on the basis of image synthesis, daylighting performance was analyzed by HDR Scope software. This resolved the long time calculation, the detailed environment information and the large error of the daylighting simulation. This paper provide technical support for the daylighting environment measurement, evaluation and software correction.
high dynamic range-Image; daylighting performance; field work measurement; procedure of the technology
国家自然科学基金面上项目“基于人工神经网络的严寒地区可持续办公建筑多目标优化设计方法研究”(编号:51578172)
TM923
A
10.3969/j.issn.1004-440X.2017.02.014
猜你喜欢
艺术家(2023年8期)2023-11-02 02:05:28
卫星应用(2022年7期)2022-09-05 02:36:02
小哥白尼(军事科学)(2022年2期)2022-05-25 13:19:30
卫星应用(2022年3期)2022-05-23 13:44:30
卫星应用(2022年1期)2022-03-09 06:22:20
环球慈善(2019年6期)2019-09-25 09:06:24
红领巾·萌芽(2019年8期)2019-08-27 15:30:15
摄影之友(影像视觉)(2019年3期)2019-03-30 01:36:56
小天使·六年级语数英综合(2017年5期)2017-05-27 20:14:50
现代工业经济和信息化(2016年19期)2016-05-17 05:38:10
